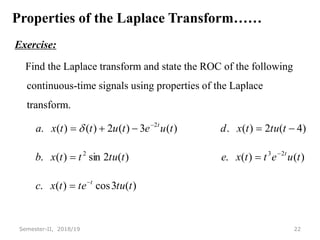
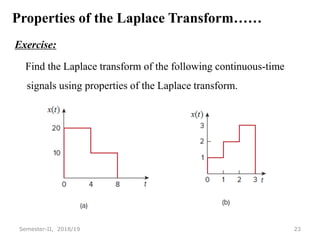
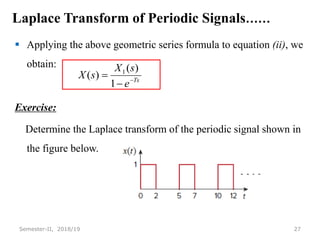
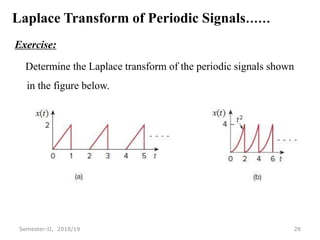
This document provides an overview of the Laplace transform and its inverse. It defines the Laplace transform, discusses properties such as linearity and time shifting. It also covers the region of convergence, rational Laplace transforms containing poles and zeros, and properties related to differentiation and integration in both the time and s-domains. Examples are provided to find Laplace transforms and illustrate properties. Periodic signals are also discussed, showing how they can be represented as the sum of shifted components, and taking the Laplace transform using time shifting properties.
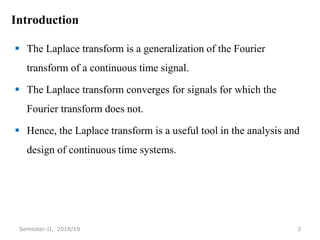
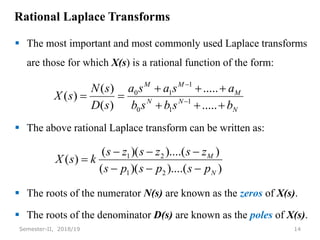
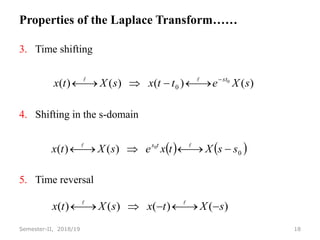

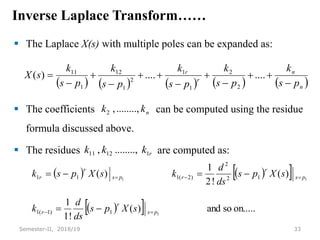
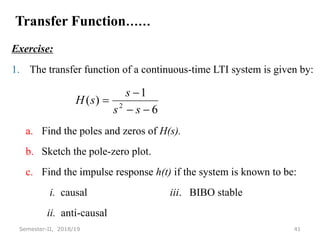
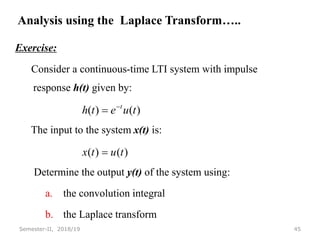
![Laplace Transform of Periodic Signals……
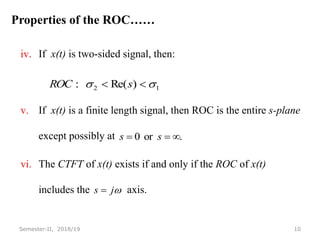
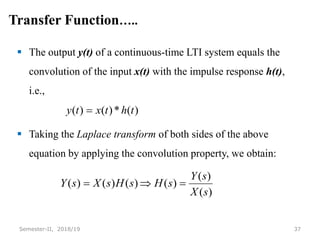
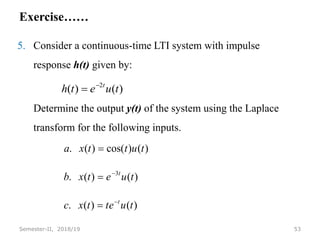
Note that the signal x1(t) can be expressed as:
25
Semester-II, 2018/19
Fig. Decomposition of the periodic signal into its components
otherwise
,
0
0
,
)
(
)]
(
)
(
)[
(
)
(
1
T
t
t
x
T
t
u
t
u
t
x
t
x](https://image.slidesharecdn.com/05-laplacetransformanditsinverse2-231105092022-6d2d4033/85/05-Laplace-Transform-and-Its-Inverse_2-ppt-25-320.jpg)
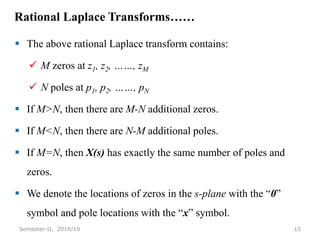
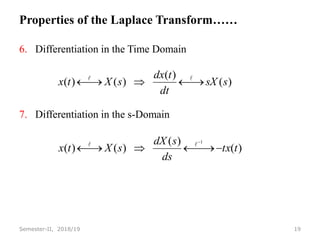
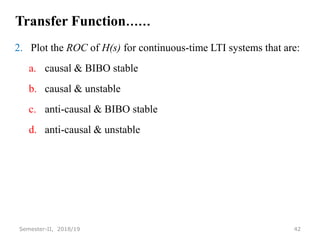
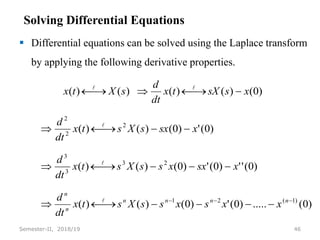
![Laplace Transform of Periodic Signals……
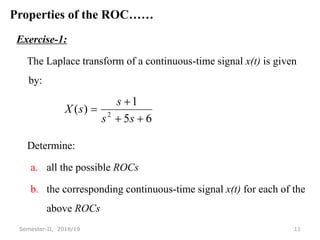
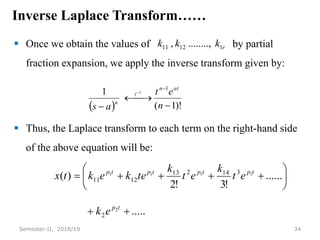
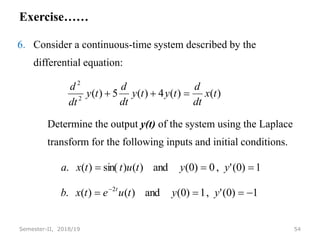
Taking the Laplace transform of both sides of equation (i) by
applying time-shifting property, we get:
Consider the geometric series formula given by:
26
Semester-II, 2018/19
(ii)
e
e
e
s
X
e
s
X
e
s
X
e
s
X
s
X
s
X
Ts
Ts
Ts
Ts
Ts
Ts
......]
1
)[
(
....
)
(
)
(
)
(
)
(
)
(
3
2
1
3
1
2
1
1
1
1
,
1
1
......
1 3
2
0
r
r
r
r
r
r
k
k](https://image.slidesharecdn.com/05-laplacetransformanditsinverse2-231105092022-6d2d4033/85/05-Laplace-Transform-and-Its-Inverse_2-ppt-26-320.jpg)











































![CHAPTER LAPLACE TRANSFORM [Được lưu tự động].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/chapterlaplacetransformclutng-230102000908-d6e0e181-thumbnail.jpg?width=640&height=640&fit=bounds)