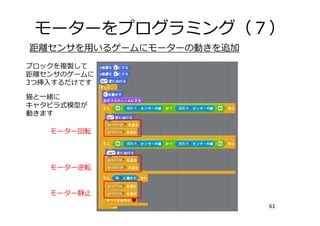
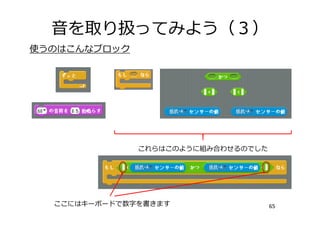
中学生にラズベリーパイ(Raspberry Pi)を用いてプログラミングと電子工作を体験してもらった講義の資料です。プログラミングの道具としてはスクラッチ(Scratch)を用います。電子工作としては、LEDの点滅、距離センサの利用、モーター搭載キャタピラ式模型の制御を行ないます。












































































![SSII2022 [OS3-02] Federated Learningの基礎と応用](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2022-os3-02-220607020834-2b5f93ff-thumbnail.jpg?width=640&height=640&fit=bounds)





































