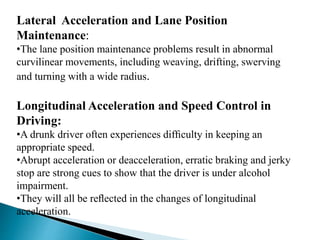
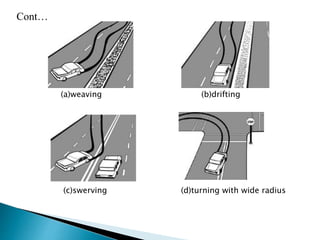
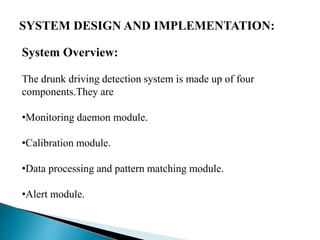
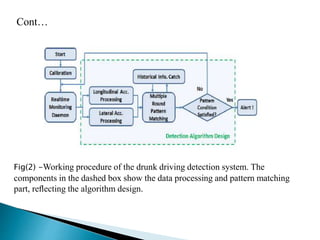
This document proposes a mobile phone-based system to detect drunk driving using the phone's accelerometer and orientation sensors. It would analyze acceleration patterns to identify lane maintenance issues, speed control problems, and impaired judgment that characterize drunk driving. The system includes modules for monitoring sensor data, calibrating readings, processing acceleration patterns over time to identify atypical cues, and alerting the driver or emergency services if drunk driving is detected. It aims to provide an efficient way to detect drunk driving using only a mobile phone placed in the vehicle.
![References:
[1] J. Faber, “Detection of Different Levels of Vigilance by
EEG Pseudo Spectra”, in Neural Network World, 14(3-4), pp.
285-290, 2004.
[2] U.S. NHTSA, “Traffic Safety”,
http://www.nrd.nhtsa.dot.gov/Pubs/ 811172.pdf
[3] U.S. NHTSA, “The Visual Detection of DWI Motorists”,
http://www.
nhtsa.dot.gov/people/injury/alcohol/dwi/dwi.html/index.htm](https://image.slidesharecdn.com/drunkdriverdetection-140403085555-phpapp01/85/Mobile-Phone-Based-Drunk-driving-detection-16-320.jpg)















































