
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Research and Prototyping Ground Robot Platform
Similar to Research and Prototyping Ground Robot Platform (20)
Recently uploaded
Recently uploaded (20)
Research and Prototyping Ground Robot Platform
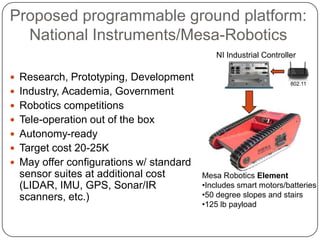
- 1. Proposed programmable ground platform: National Instruments/Mesa-Robotics NI Industrial Controller Research, Prototyping, Development 802.11 Industry, Academia, Government Robotics competitions Tele-operation out of the box Autonomy-ready Target cost 20-25K May offer configurations w/ standard sensor suites at additional cost Mesa Robotics Element (LIDAR, IMU, GPS, Sonar/IR •Includes smart motors/batteries scanners, etc.) •50 degree slopes and stairs •125 lb payload
- 2. Onboard Controller 1.66 GHz Core Duo Fanless 80 GB SATA HDD, 2 GB DDR 2 memory OS: Option 1: WinXP on both cores Option 2: WinXP on one core, RTOS on the other Optional PCI plug-in card with: FPGA linked to analog and digital I/O Additional I/0: CAN, CANOpen, RS-232/422/485, etc. SWaP 4.33” x 7.9” x 8.66”; 8 lbs, 40W max (no PCI)
- 3. Onboard Controller, Continued PCI Same platform can host Sensor interface and processing High-level code for route planning, mapping, obstacle avoidance, Kalman filtering, etc. Hard realtime control code on RTOS (Pharlap, modified for improved multi-threading performance) FPGA hardware definition linked to I/O for emergency stop, filtering, fast PID, etc. This is via a PCI module C, C++, LabVIEW, .Net, Java, etc. Serial, USB, CAN, CANopen, Firewire, I2C, SPI, TCP, UDP, Arync 429, PCM, analog sensors, etc., etc.
- 4. Example Configuration: Dual OS + PCI FPGA Target Core 1 Core 2 USB x 4 Win XP NI Pharlap Ethernet x 2 C/C++, LabVIEW, Java, LabVIEW, C Hypervisor .Net, etc. Rs-232 PCI Digital I/O with FPGA •Simple I/O, PWM, I2C, SPI,Custom Protocols Analog, digital I/O PCI-78xxR Terminal block •CAN Reconfigurable I/O digital I/O Terminal block •Serial digital I/O Optional •Current •Bridge Sensors •IEPE Sensors •Motor drivers FPGA programmable via •Etc., Etc. LabVIEW and/or HDL
- 5. Example Configuration: Dual OS, Ethercat, PCI-xxxx Core 1 Core 2 USB x 4 Win XP Hypervisor Pharlap Ethernet x 1 LabVIEW, C/C++, Java, LabVIEW, C .Net Rs-232 Cat 5 PCI •Current, Volt PCI-xxxx •Bridge Sensors •IEPE Sensors CAN, 1394, 232/485, etc •Motor drivers •Etc., Etc. Digital I/O with Scan Engine •Simple I/O, PWM, encoder
- 6. Ground Platform Payload Area: 216 in2 (1394 cm2) Payload Capacity: 125 Lb (57 kg) Towing Capacity: 225 Lb (102 kg) Fording Depth: 6 in (152 mm) Ground Clearance: 3 In (76 mm) Zero Turn Radius Climbs 50° Stairs 2-48VDC Smart Motors w/ Encoders Size: 21W x 12H x 30L inches (533 x 304 x 762 mm) Weight: 40 Lb (18 kg) Batteries: 12 VDC NiMH (4 Rechargeable Packs) Operating Time: 6 -10 hrs
- 7. Thank you for your feedback on this proposed ground robotics base platform ! Charlie Knapp, MSEE Business Development Manager Autonomous Systems and Robotics National Instruments charlie.knapp@ni.com Mobile: 714.393.5470