Downloaded 17 times


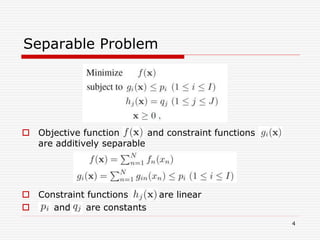

































This document discusses using linear approximation techniques to solve a nonlinear optimization problem for renewable sensor networks with wireless energy transfer. It presents a case study where the objective is to maximize the vacation time of a wireless charging vehicle over each cycle time by determining its optimal traveling path, charging schedule at each sensor node, and multi-hop data routing. The nonlinear problem is approximated using piecewise linear functions and solved to provide a near-optimal solution within a specified performance gap. Numerical results demonstrate the approach for a 50-node and 100-node network.