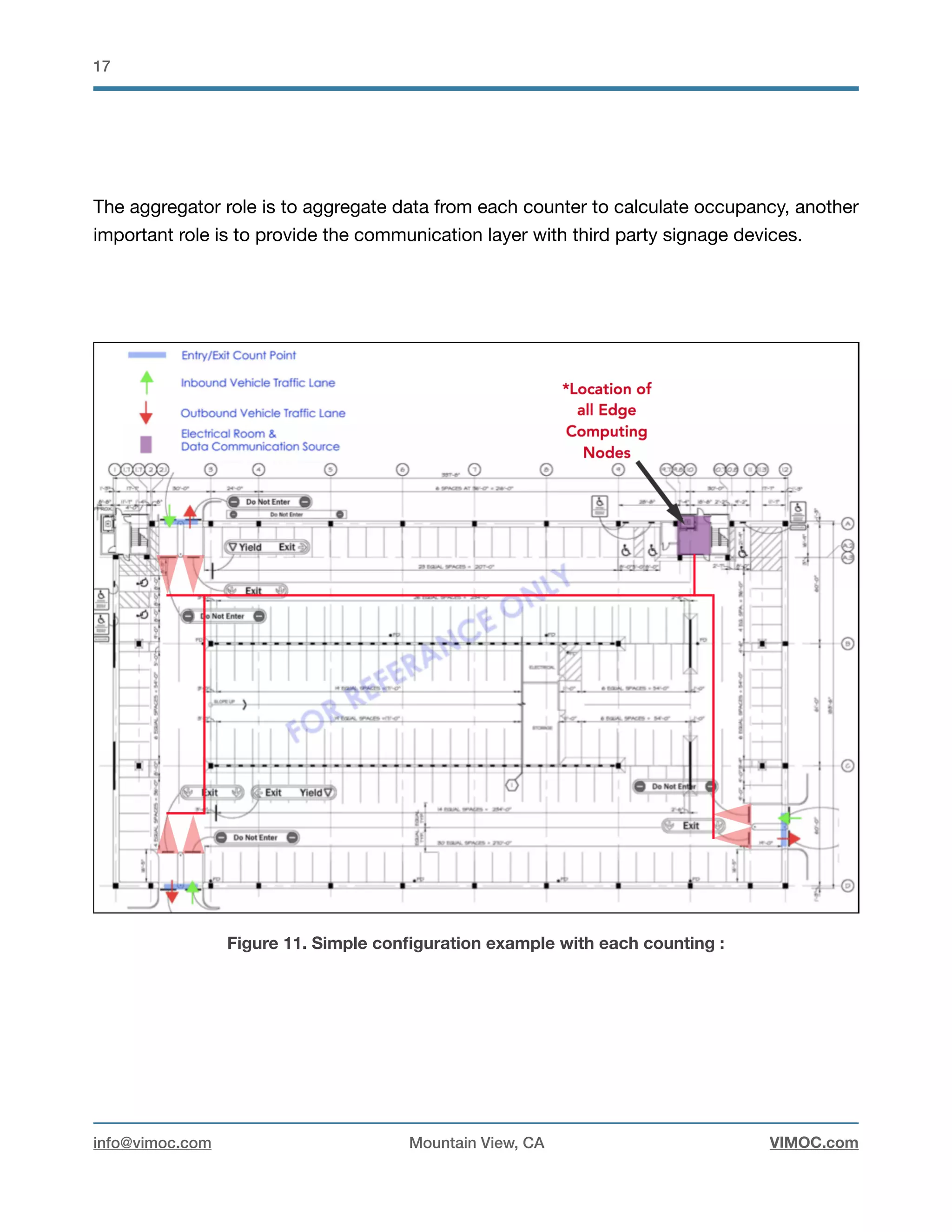
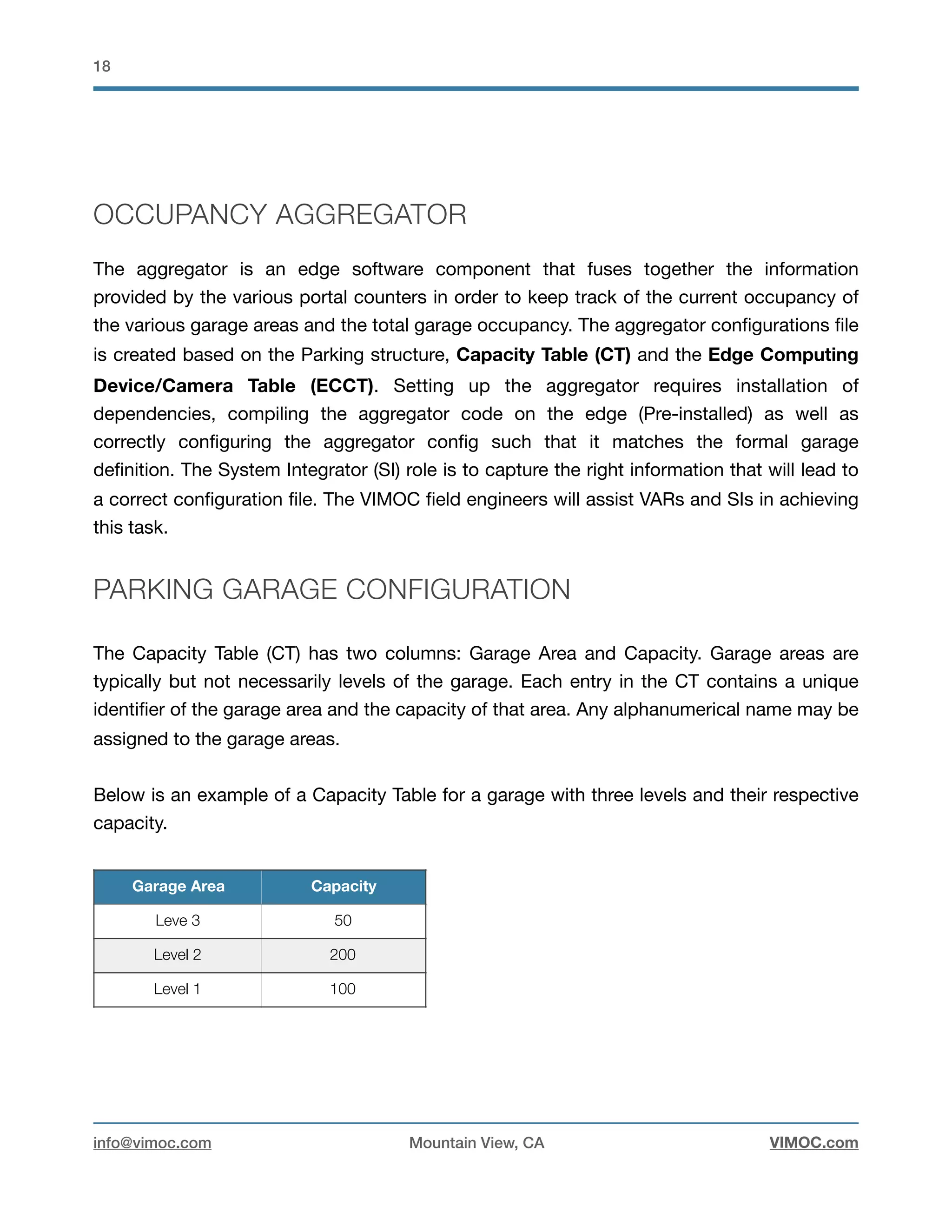
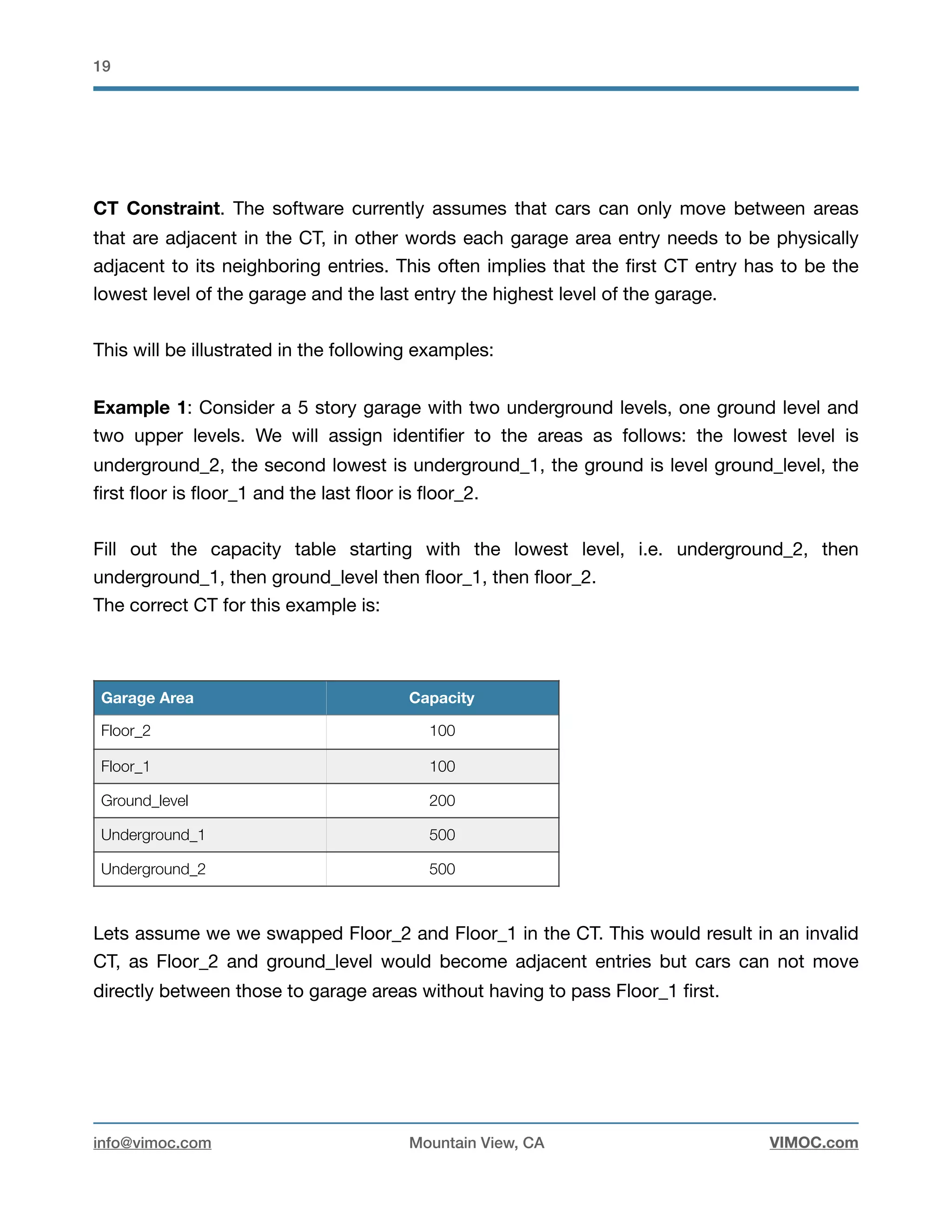
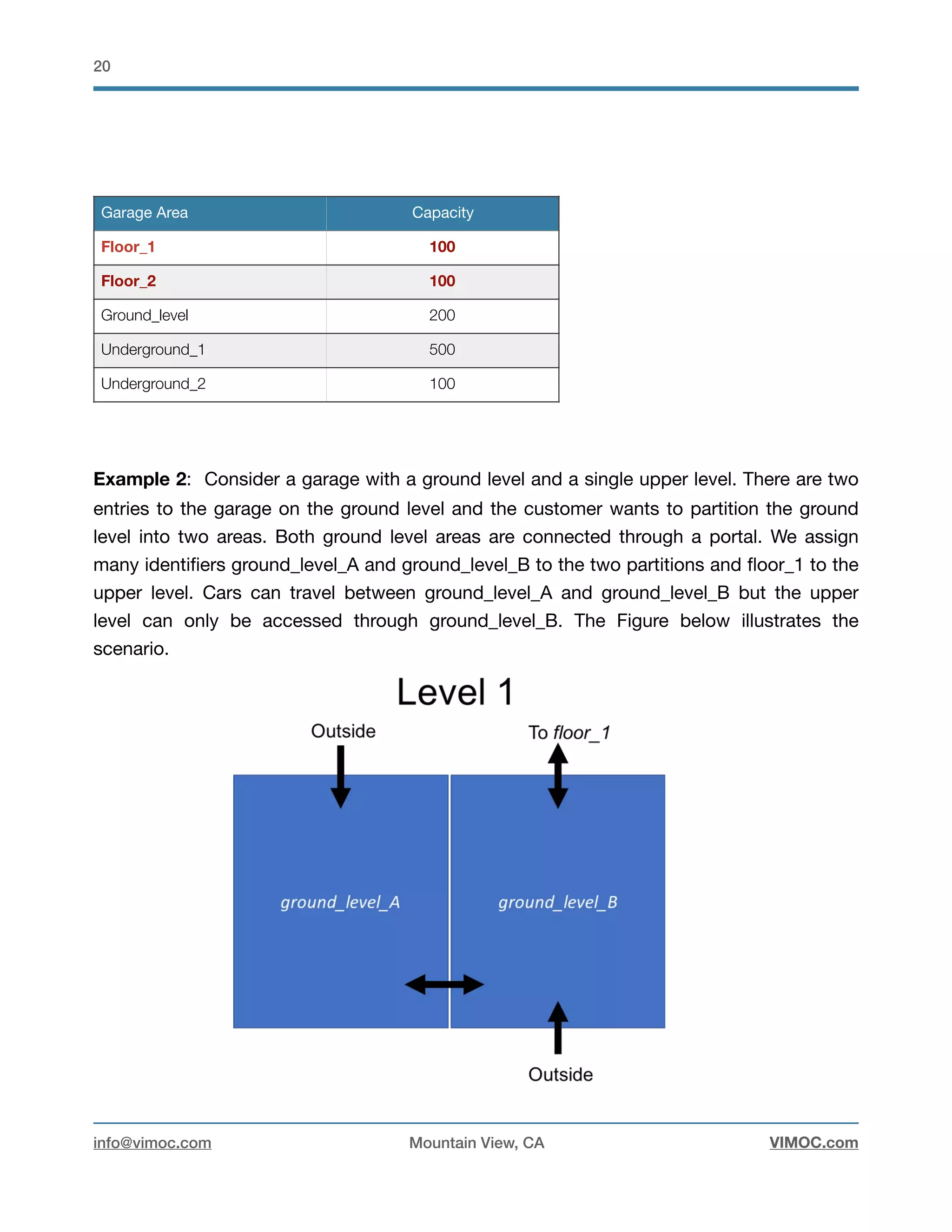
Downloaded 13 times
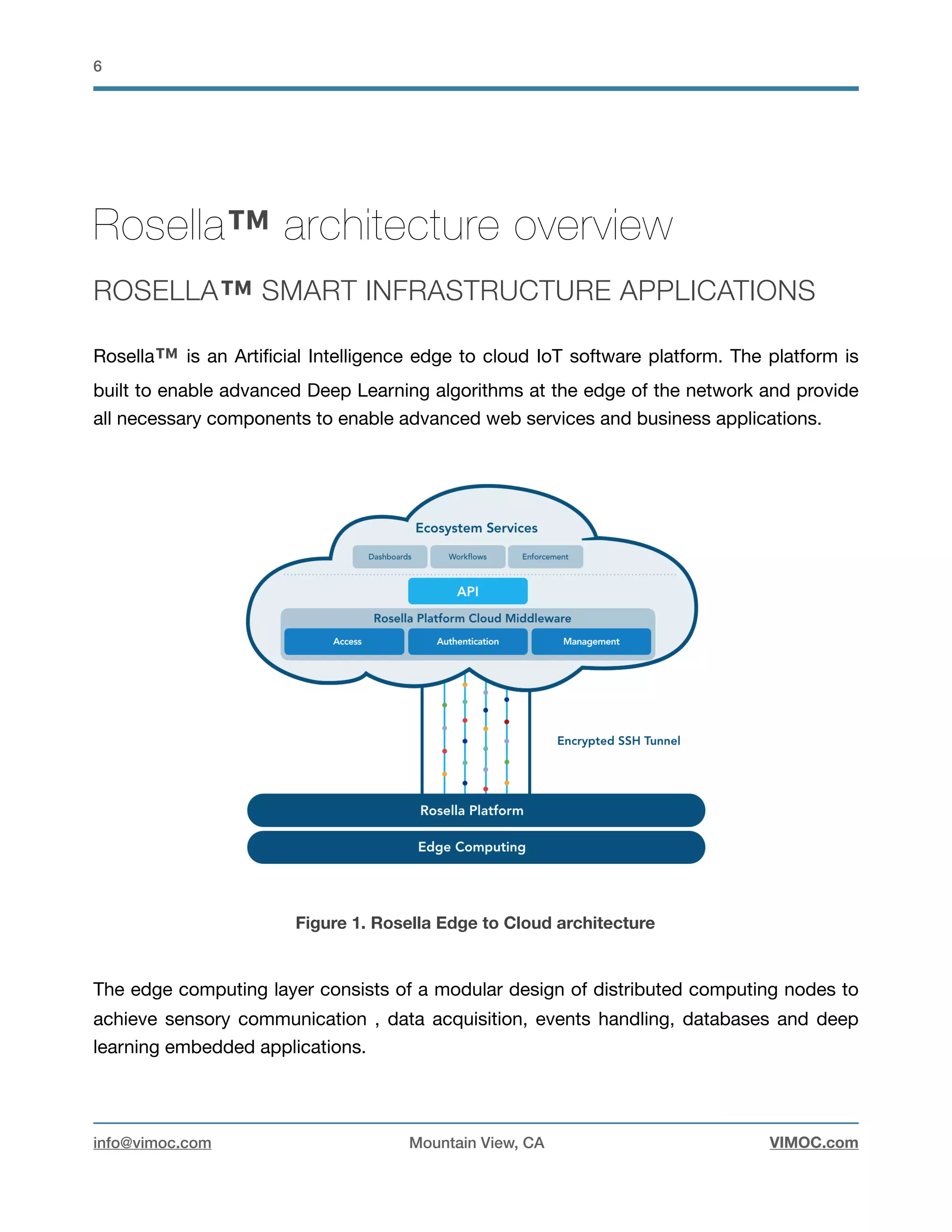
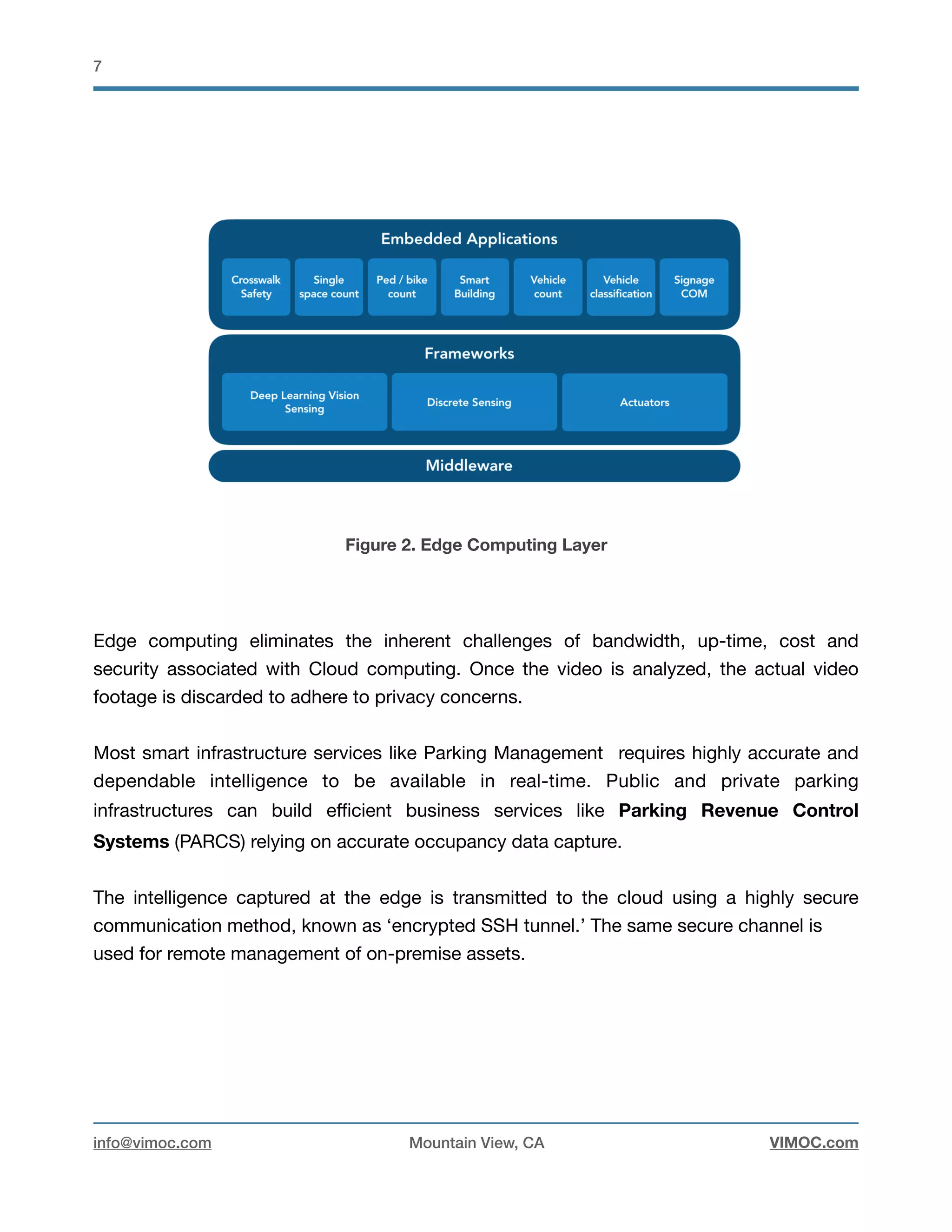
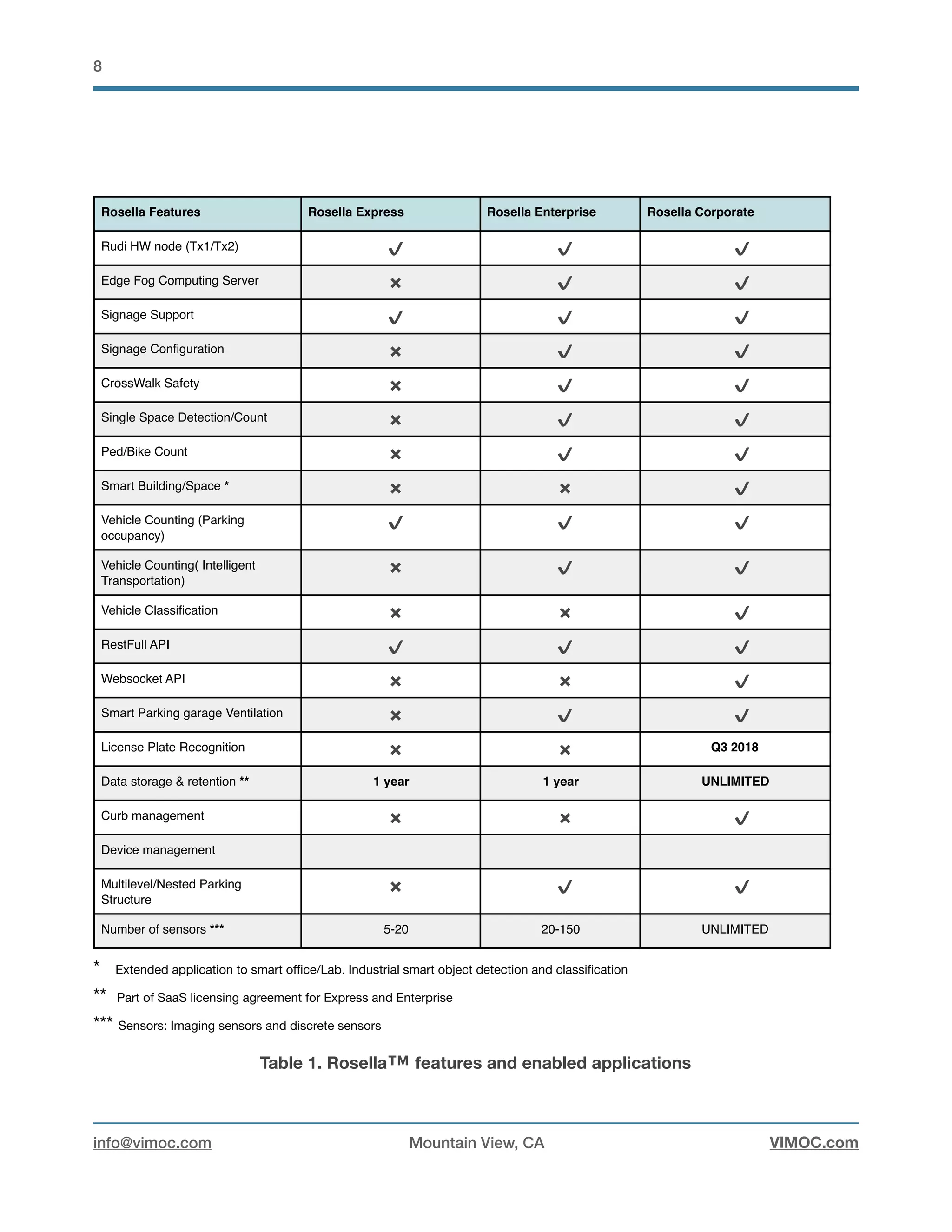
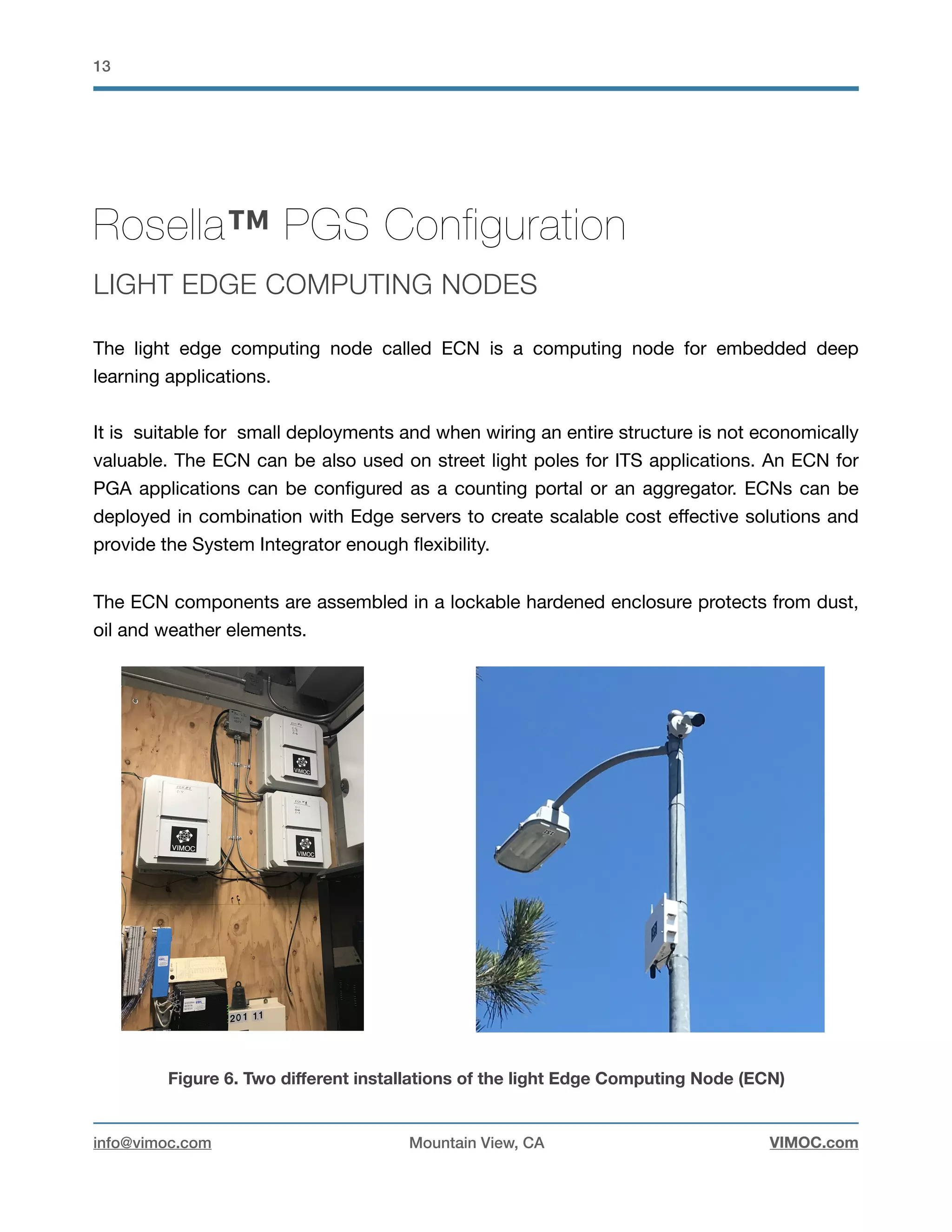


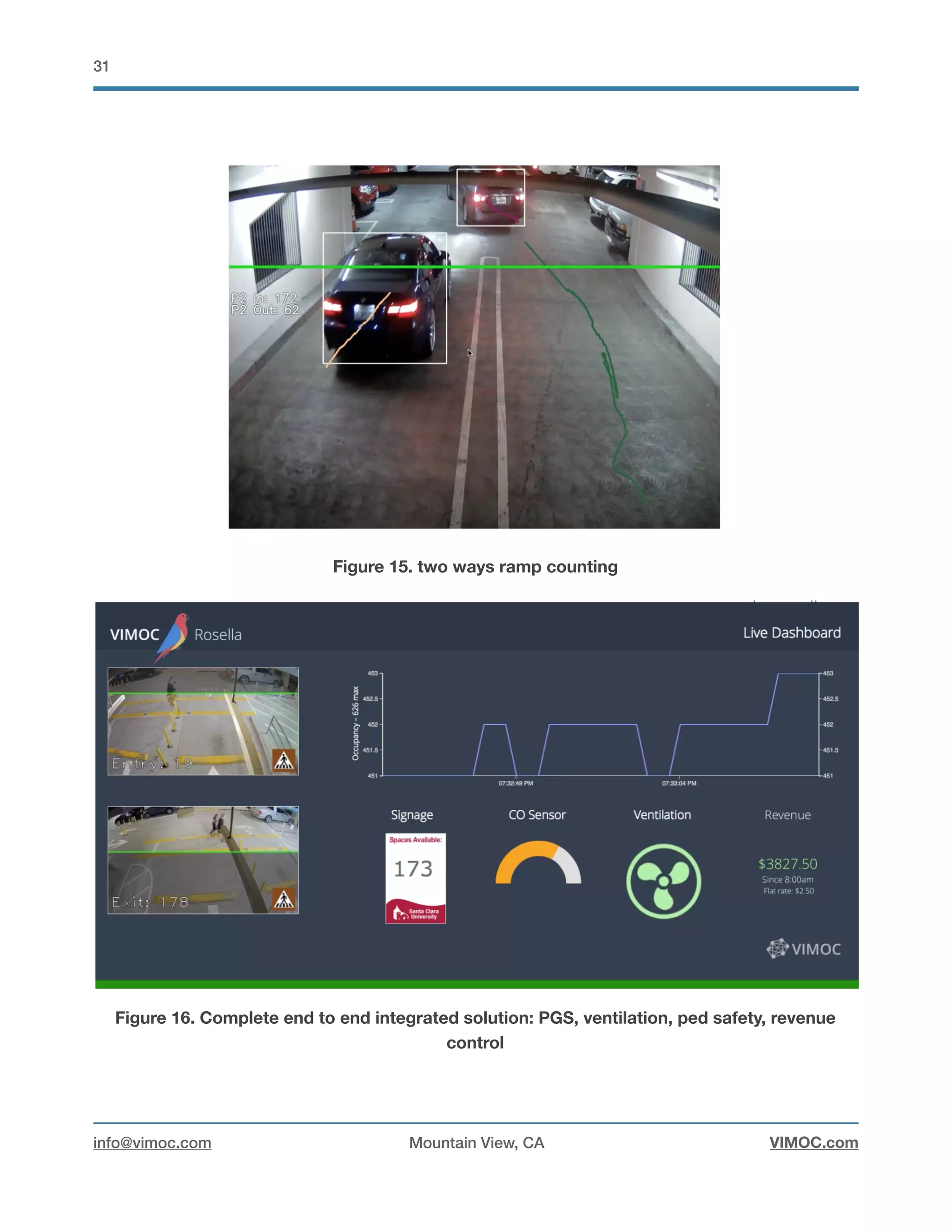
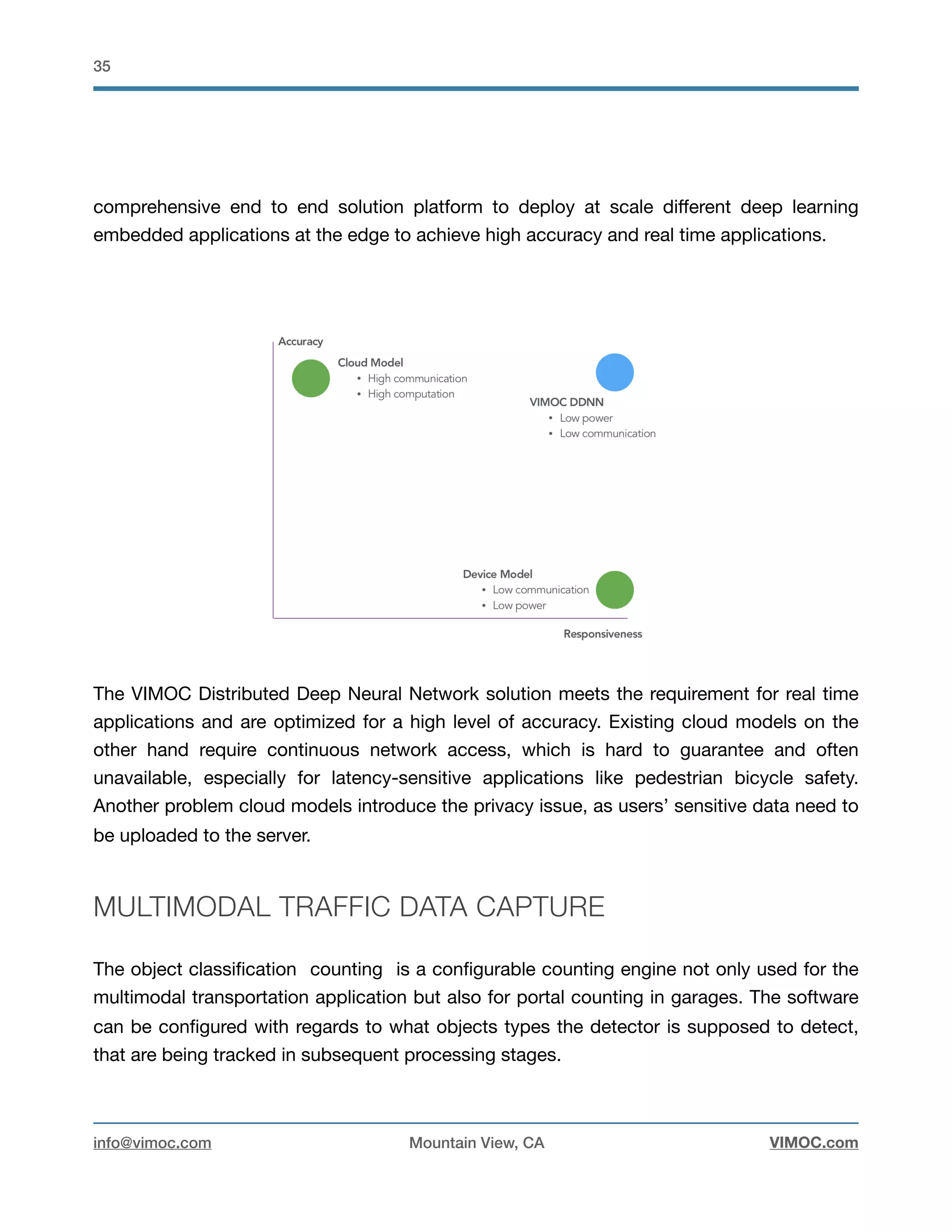
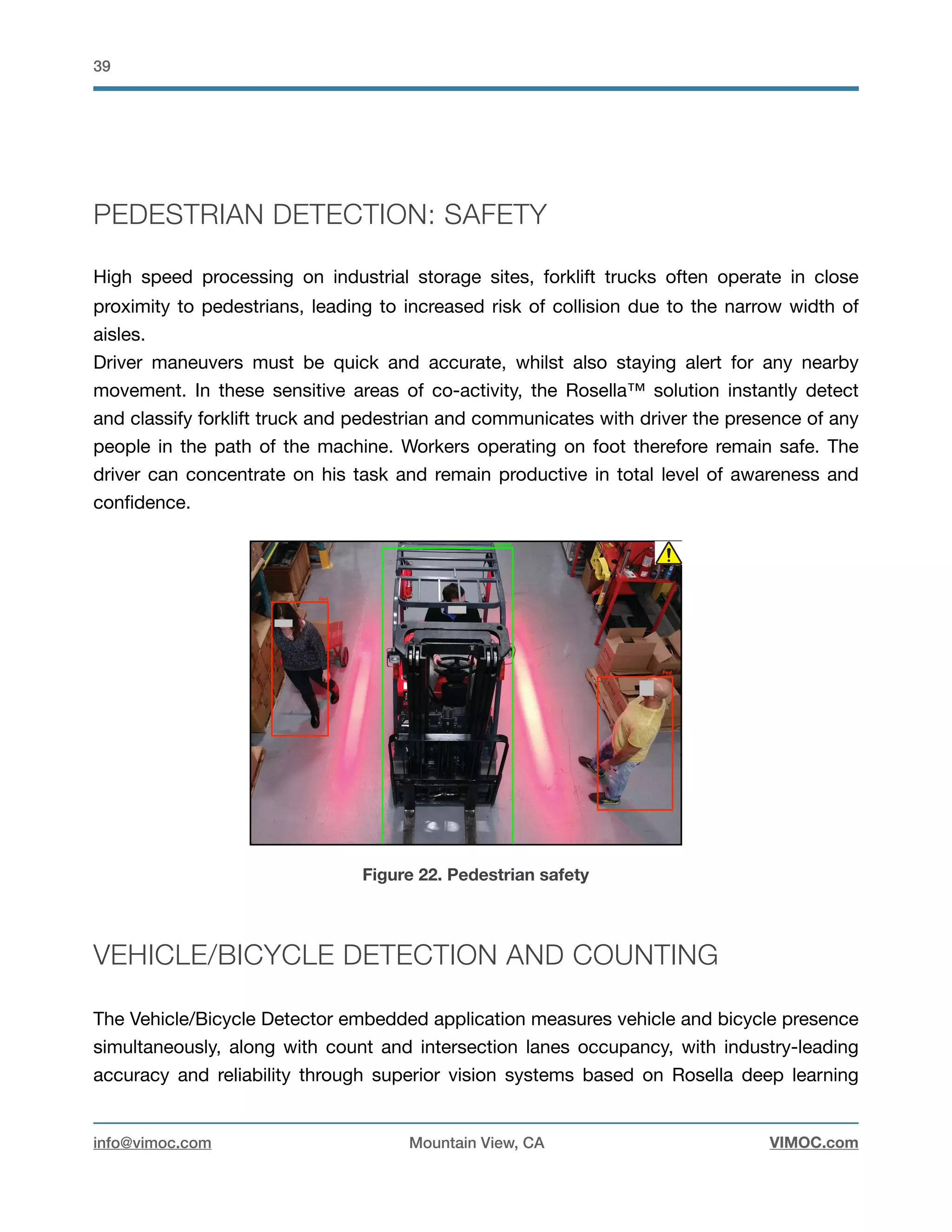

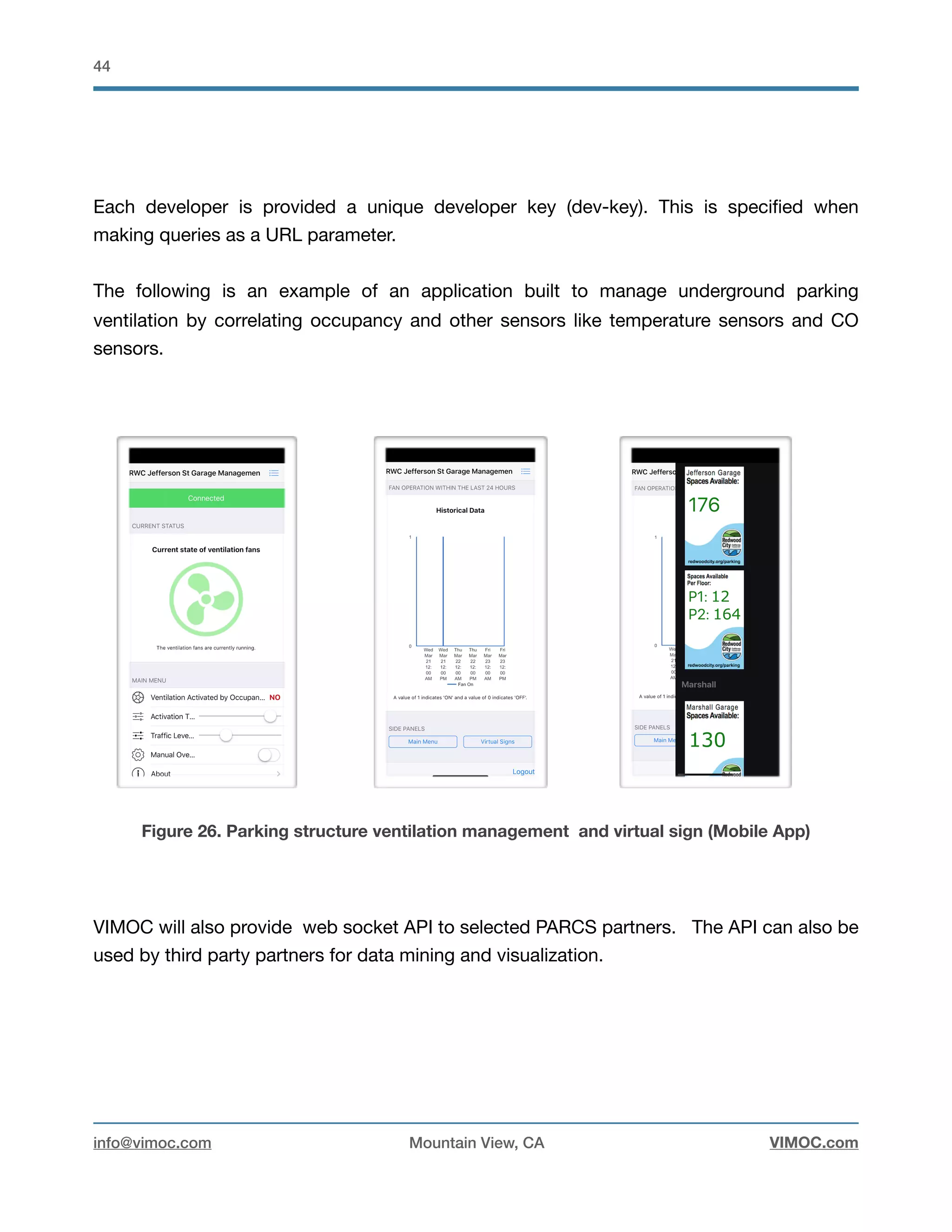


The document discusses the RosellaTM smart infrastructure platform by Vimoc Technologies, focusing on its architecture and applications in parking guidance and smart mobility. It highlights the benefits of edge computing in enhancing urban mobility efficiency and reducing congestion while outlining best practices for deploying smart infrastructure solutions. The RosellaTM platform combines advanced AI capabilities with various hardware components to enable real-time data processing and management in parking structures.
































































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)

