
Recommended
Recommended
More Related Content
Similar to 三維機器視覺的最新應用與趨勢 part 2
Similar to 三維機器視覺的最新應用與趨勢 part 2 (20)
More from CHENHuiMei
More from CHENHuiMei (20)
Recently uploaded
Recently uploaded (20)
三維機器視覺的最新應用與趨勢 part 2
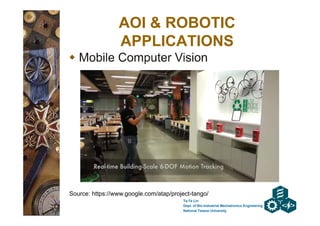
- 1. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University AOI & ROBOTIC APPLICATIONS Source: https://www.google.com/atap/project-tango/
- 2. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University AOI & ROBOTIC APPLICATIONS Stereo Vision Camera
- 3. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University Vehicle Collision Avoidance 19.6〫 43 AOI & ROBOTIC APPLICATIONS
- 4. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University Vehicle Collision Avoidance AOI & ROBOTIC APPLICATIONS
- 5. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University AOI & ROBOTIC APPLICATIONS Stereo Line Scan Camera Source: http://www.chromasens.de/ Specifications Range Optical Resolution 5~70 m FOV 35~500 mm Height Resolution 1~10 m Height Range 0.7~52 mm Working Distance 71.9~796.9 mm Max. Transport Speed 0.1~1.45 mm Line Rate Up to 60 kHz Number of Pixels Max. 7300
- 6. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University AOI & ROBOTIC APPLICATIONS Stereo Line Scan Camera Source: http://www.chromasens.de/ Metal Surface Wire Bonds Ball Grid Array PCB
- 7. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University AOI & ROBOTIC APPLICATIONS Stereo Line Scan Camera Source: http://www.chromasens.de/
- 8. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University AOI & ROBOTIC APPLICATIONS 3D Area Scan Camera Source: http://www.shape-drive.com/ Specifications Range Optical Resolution 10~150 m Height Resolution 1~50 m Height Range 2~100 mm Working Distance 10~400 mm Acquisition Time 0.8 or 1.4 s Number of Pixels 2.3 M pixels
- 9. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University AOI & ROBOTIC APPLICATIONS 3D Area Scan Camera Source: http://www.shape-drive.com/
- 10. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University AOI & ROBOTIC APPLICATIONS LIDAR Sensor Source: http://www.chromasens.de/ 64 lasers/detectors 360 degree FOV (azimuth) 0.08 degree angular resolution 26.8 degree vertical FOV <2 cm distance accuracy 5~15 Hz FOV update 50 m range for pavement 120 m range for cars and forliage > 1.3 M points per second 300~900 rpm spin rate 100 MBPS UDP Ethernet packets 905 nm wavelength ~10 ns pulse width Class 1 – eye safe laser
- 11. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University AOI & ROBOTIC APPLICATIONS LIDAR for Autonomous Navigation Source: http://google.com/+GoogleSelfDrivingCars
- 12. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University Source: www.universalrobotics.com AOI & ROBOTIC APPLICATIONS
- 13. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University Source: http://www.viscom.com/ AOI & ROBOTIC APPLICATIONS Solder joint inspection Solder paste inspection Wire bond inspection SMD inspection
- 14. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan UniversitySource: http://bosch-automotive.com AOI & ROBOTIC APPLICATIONS 76–77 GHz Range: 100 ~ 250 m FOV: 45 ~ 150
- 15. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University
- 16. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University FUTURE DEVELOPMENT Regarding the Market Regarding the Vision Industry Regarding Applications Regarding Academic Researches Regarding the Practical Technology
- 17. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University Human Vision vs. Machine Vision FUTURE DEVELOPMENT
- 18. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University FUTURE DEVELOPMENT Human Vision vs. Machine Vision Function Human Vision Machine Vision Spatial resolution Excellent, Non-linear, Analog Poor, but improving, Linear Grey-scale resolution Limited Relatively large (4000 shade or more) Dynamic range Excellent, Non-linear Limited, Typically linear Color resolution Limited Discriminate millions of colors Complex color pattern perception Excellent Currently poor but improving Three Dimensional Perception Automatic, Powerful, but poor in Measurement Precision Complex but can make precise measurements Learning Learns by example and deduction Generally by programming Processing speed, simple and defined tasks Relatively slow Can be very fast Processing speed, complex but ambiguity Relatively fast Very slow, or not possible Sensitive to illumination Less Yes Processing Massively parallel, Highly non-linear, Intuitive Serial, Usually linear and fixed logic
- 19. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University FUTURE DEVELOPMENT Promising Future Trends – Smarter algorithms – Higher resolution – Faster speed – Sensor miniaturization – Proliferation to daily life – Merging with computer graphics – Virtual reality – Data compression
- 20. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University FUTURE DEVELOPMENT Challenges in Computer Vision – The way biological vision works is still largely unknown and therefore hard to emulate on computers. – Attempts to ignore biological vision and reinvent a sort of silicon-based vision have not been so successful as initially expected. Olivier Faugeras
- 21. Ta-Te Lin Dept. of Bio-Industrial Mechatronics Engineering National Taiwan University THANK YOU … The study of vision must therefore include not only the study of how to extract from images the various aspects of the world that are useful to us, but also an inquiry into the nature of the internal representations by which we capture this information and thus make it available as basis for decisions about our thoughts and action. David Marr, Vision