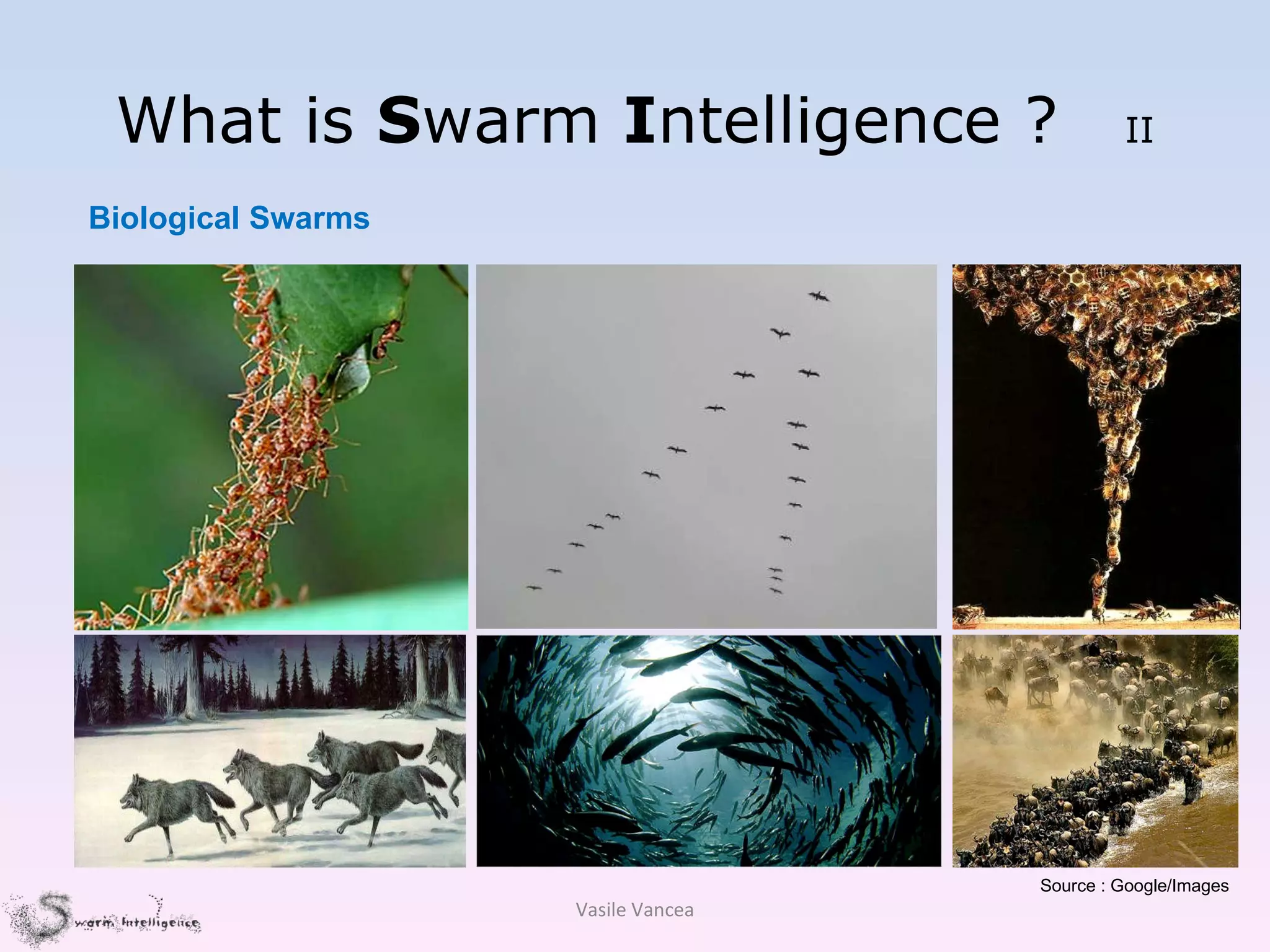
The document discusses swarm intelligence and swarm robotics. Swarm intelligence is inspired by biological swarms like ants and fish schools, and involves many simple agents interacting locally to achieve complex group behaviors. Swarm robotics applies swarm intelligence concepts to the control of multi-robot systems. Some examples of swarm robotics projects are fleets of drones exploring the ocean and ingestible surgical robots. The benefits of swarm intelligence include using less complicated agents, division of labor, safety in numbers, and decreased energy consumption.
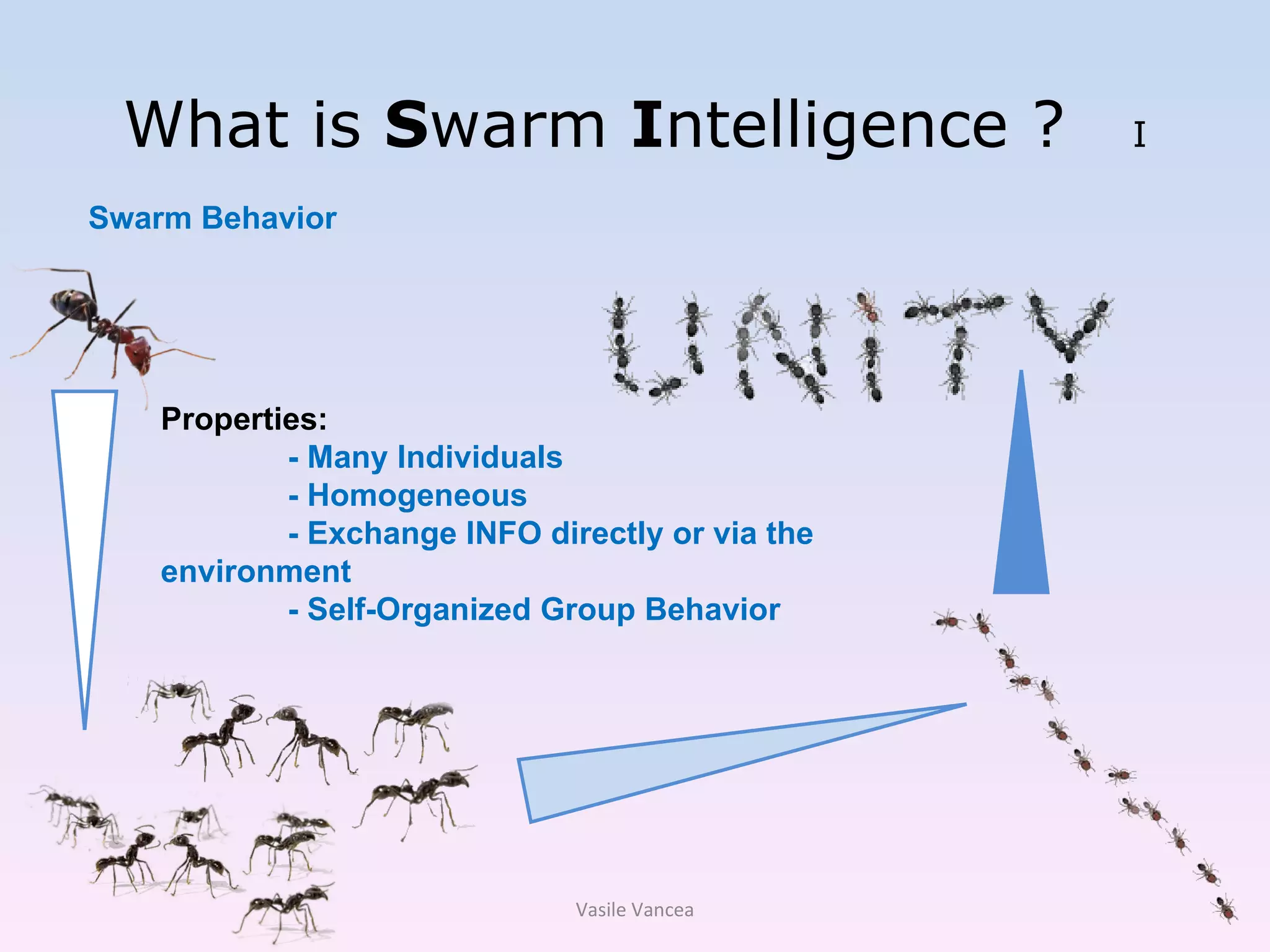
![What is S warm I ntelligence ? III Collective problem solving by ants Algorithms Vasile Vancea Travelling Salesman Problem ( TSP ) 1 2 3 Bird flocks and Fish schools Cohesion Separation Alignment Auteur : Johann Dréo http://wapedia.mobi/en Boid’s experiment [7]](https://image.slidesharecdn.com/vanceavasile-swarmintelligence-100530061918-phpapp01/75/Vancea-vasile-swarm-intelligence-5-2048.jpg)
![What is S warm R obotics ? II Flyfire swarm from MIT [1] Examples I Fleet of drones to explore the ocean by AUE ( The Autonomous Underwater Explorers) [2] Vasile Vancea ARES Ingestible Surgical Robots [3] Source : http://singularityhub.com/](https://image.slidesharecdn.com/vanceavasile-swarmintelligence-100530061918-phpapp01/75/Vancea-vasile-swarm-intelligence-8-2048.jpg)
![What is S warm R obotics ? III E-puck robots Ecole Polytechnique Federale de Lausanne [4] Symbrion The University of the West of England [5] Examples I I Examples I Vasile Vancea I-Swarm Micro Robots [6] Source : http://singularityhub.com/](https://image.slidesharecdn.com/vanceavasile-swarmintelligence-100530061918-phpapp01/75/Vancea-vasile-swarm-intelligence-9-2048.jpg)
![Why SI ? Intelligent = must be able to learn about their world and develop their own ability to interact with it [8] . Groups are powerful [9] Less complicated agents. Many individuals - Division of labor. More effective - Safety in numbers. Coordinating movements . Decrease of energy consumption. Cheaper (“each termite is simple, each termite is cheap, each termite is expendable”). Vasile Vancea Source : google/images](https://image.slidesharecdn.com/vanceavasile-swarmintelligence-100530061918-phpapp01/75/Vancea-vasile-swarm-intelligence-10-2048.jpg)
![Bibliography [1] http://senseable.mit.edu/flyfire/ [2] http://jaffeweb.ucsd.edu/node/81 [3] http://www.ares-nest.org/tiki-index.php [4] http://www.e-puck.org/index.php?option=com_frontpage&Itemid=1 [5] http://www.symbrion.eu/tiki-index.php [6] http://www.i-swarm.org/MainPage/Project/P_Overview1.htm [7] http://www.red3d.com/cwr/boids [8] http://ants.gsfc.nasa.gov/ArchandAI.html [9] http://battlecode.mit.edu/2006/public/lectures/classroom5.pdf [10] Lynne E. Parker, “Distributed Intelligence: Overview of the Field and its Application in Multi-Robot Systems”, Journal of Physical Agents, vol.2, no. 1, March 2008 [11] Aleksandar Jevti ć ,Diego Andina , “ Swarm Intelligence and Its Applications in Swarm Robotics ”, 6th WSEAS Int. Conference on Computational Intelligence, Man-Machine Systems and Cybernetics, Tenerife, Spain, December 14-16, 2007 Vasile Vancea](https://image.slidesharecdn.com/vanceavasile-swarmintelligence-100530061918-phpapp01/75/Vancea-vasile-swarm-intelligence-14-2048.jpg)