Downloaded 110 times
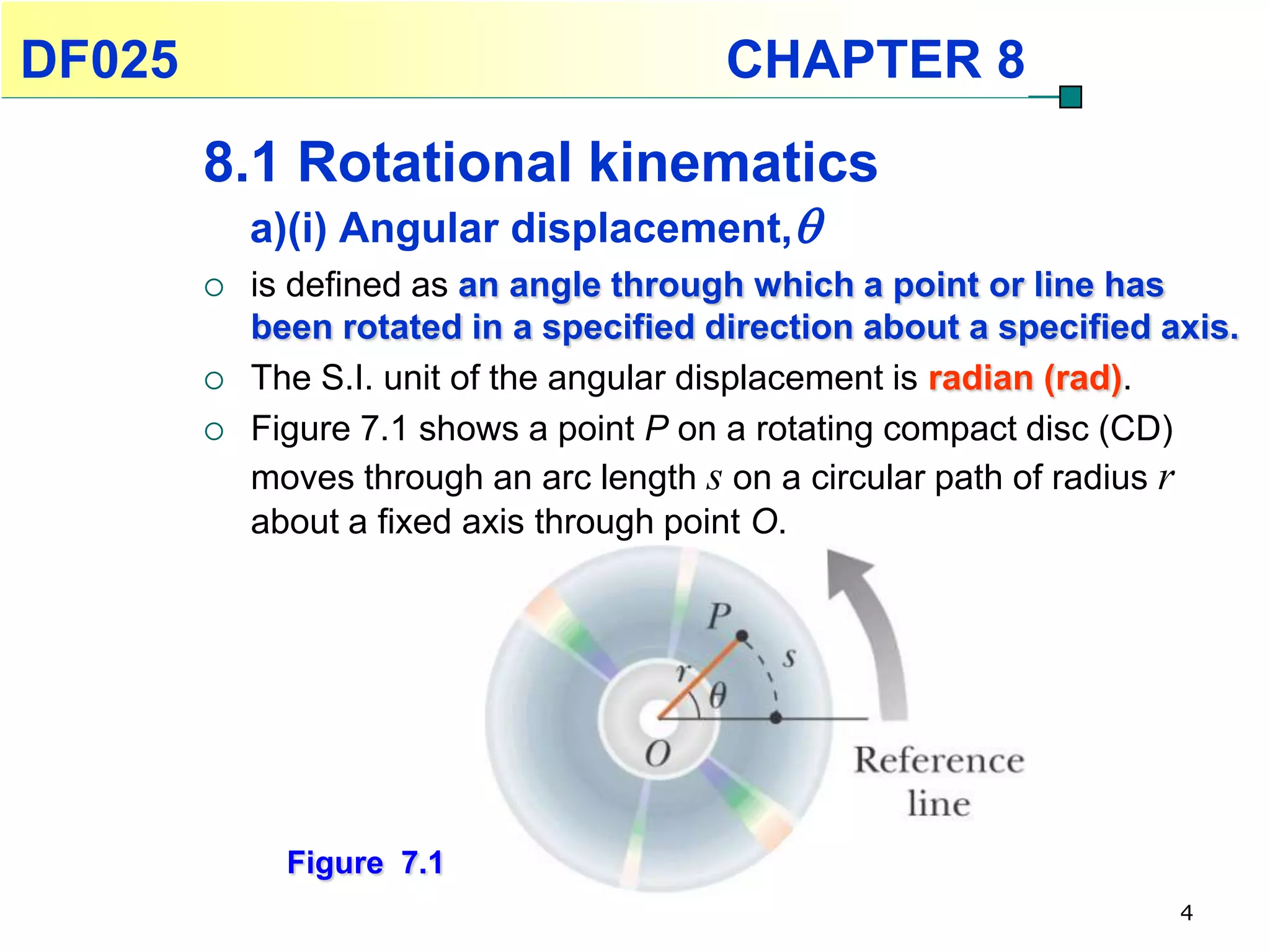
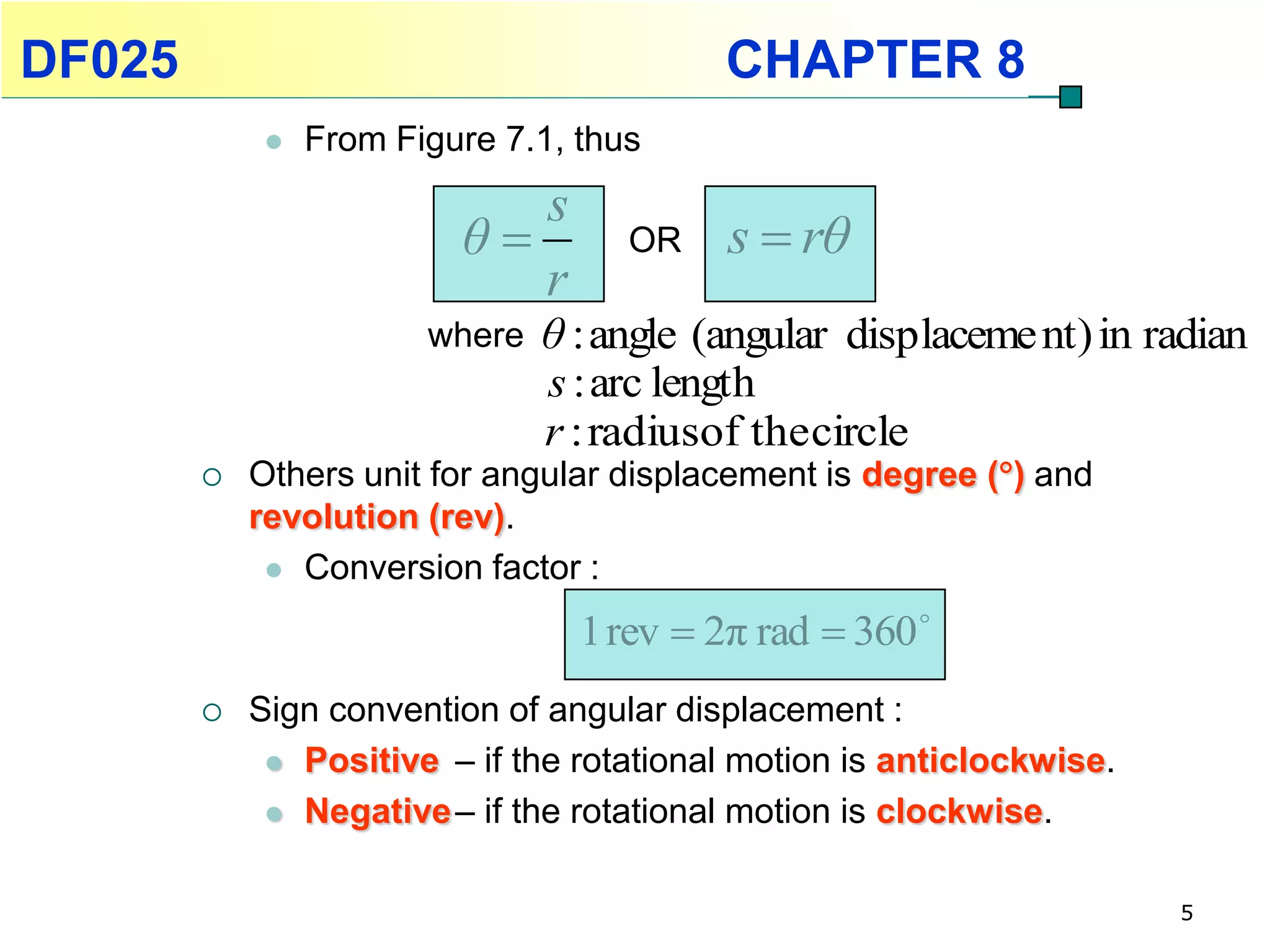
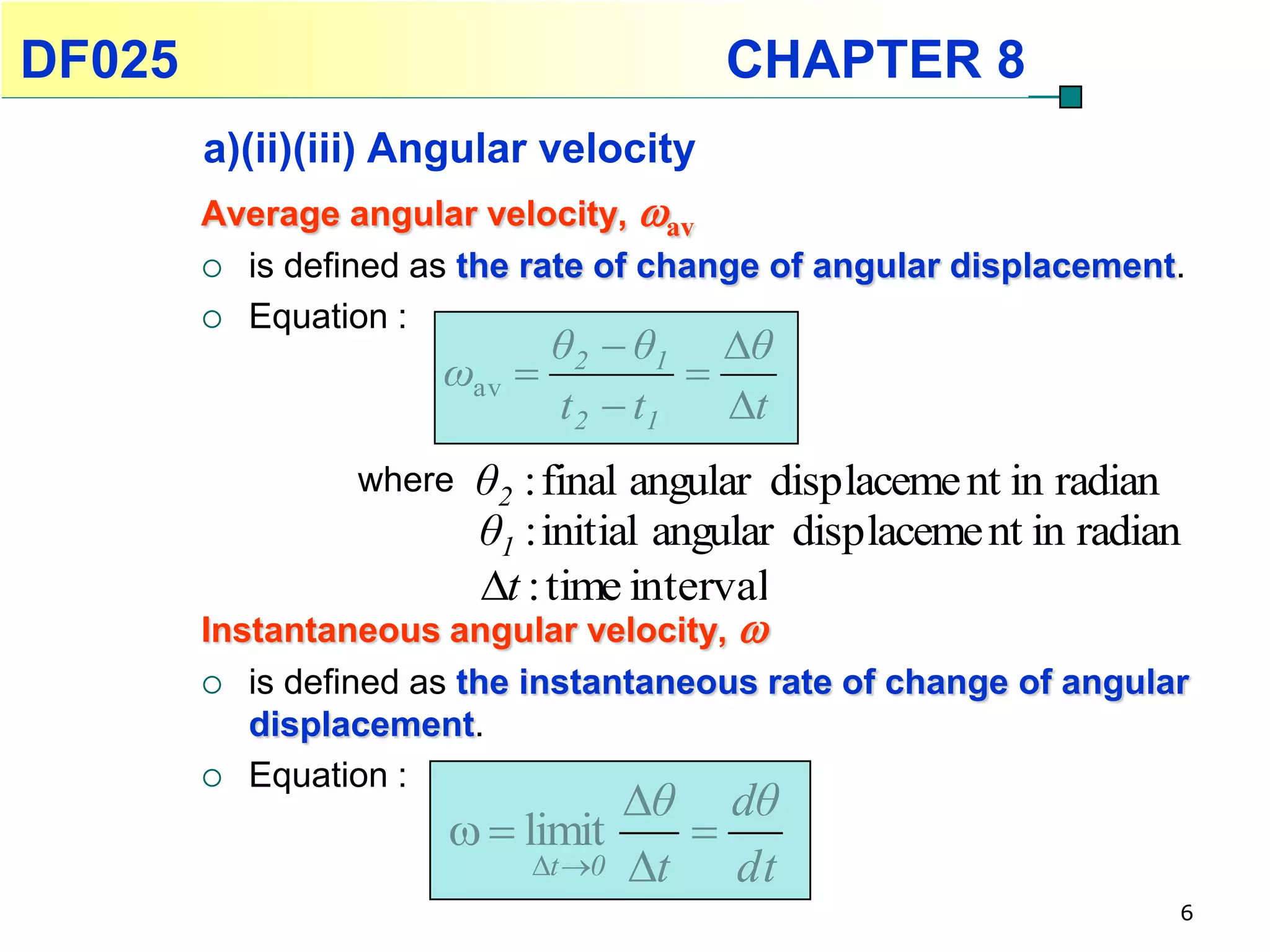
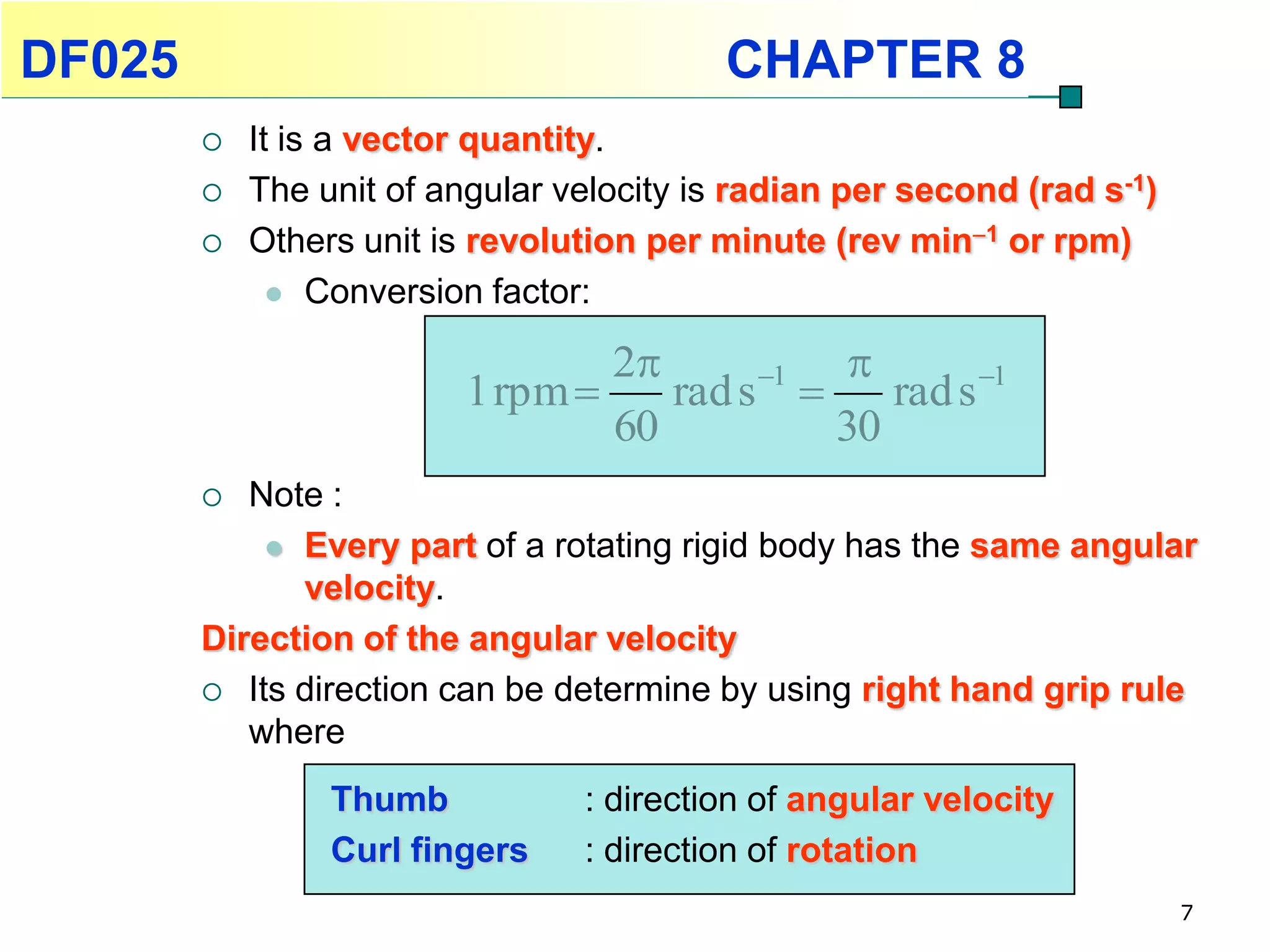
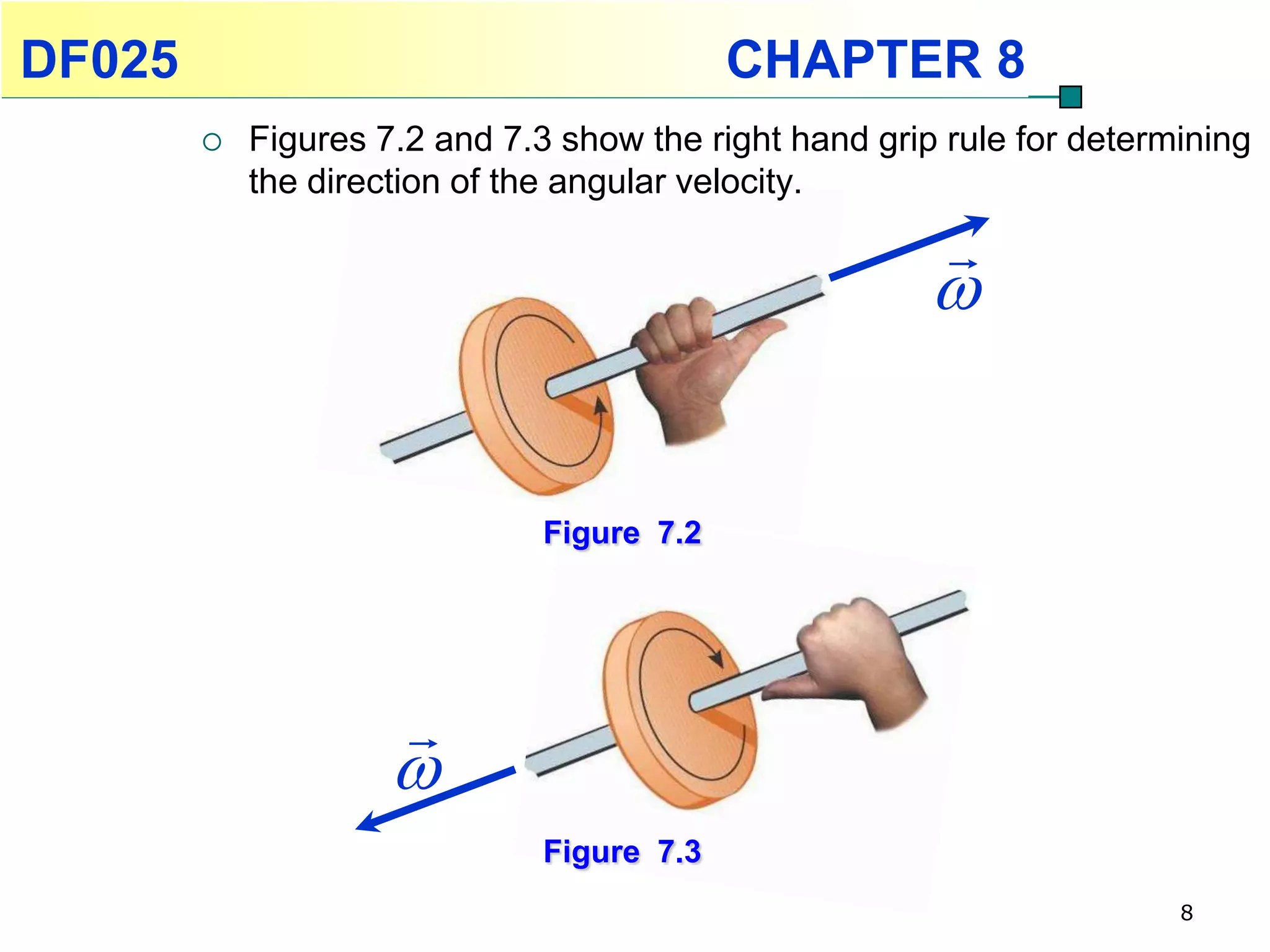
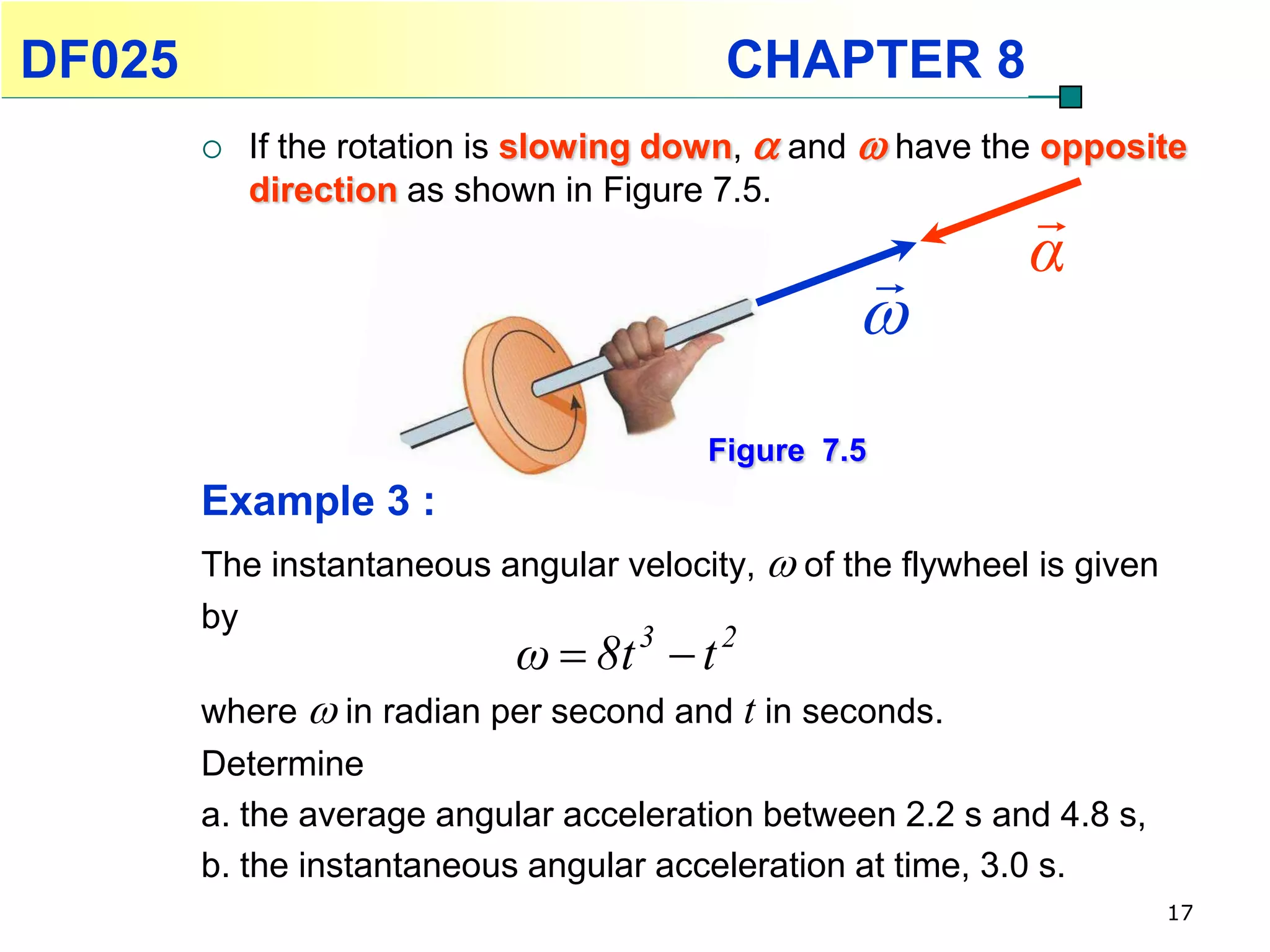
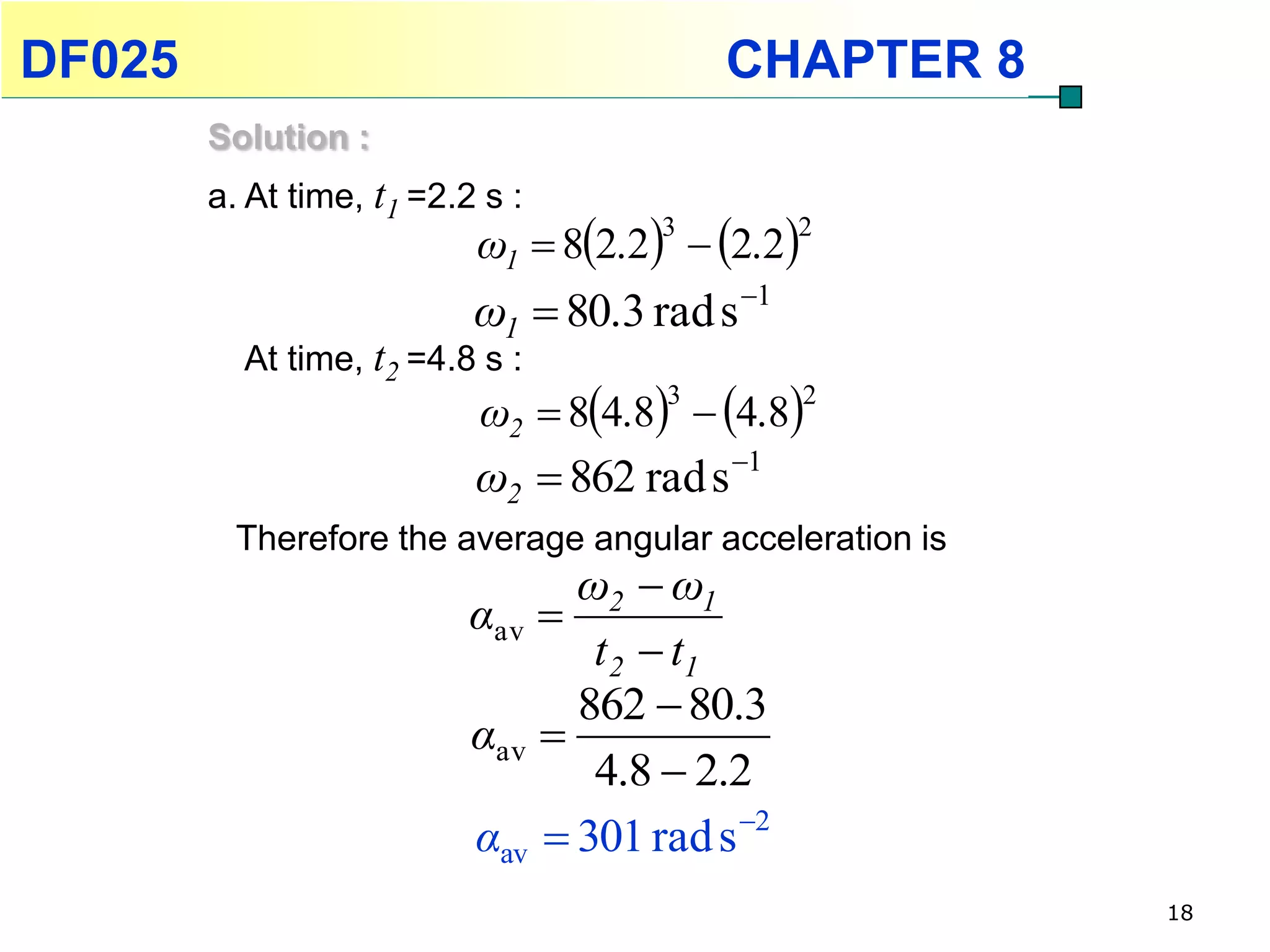
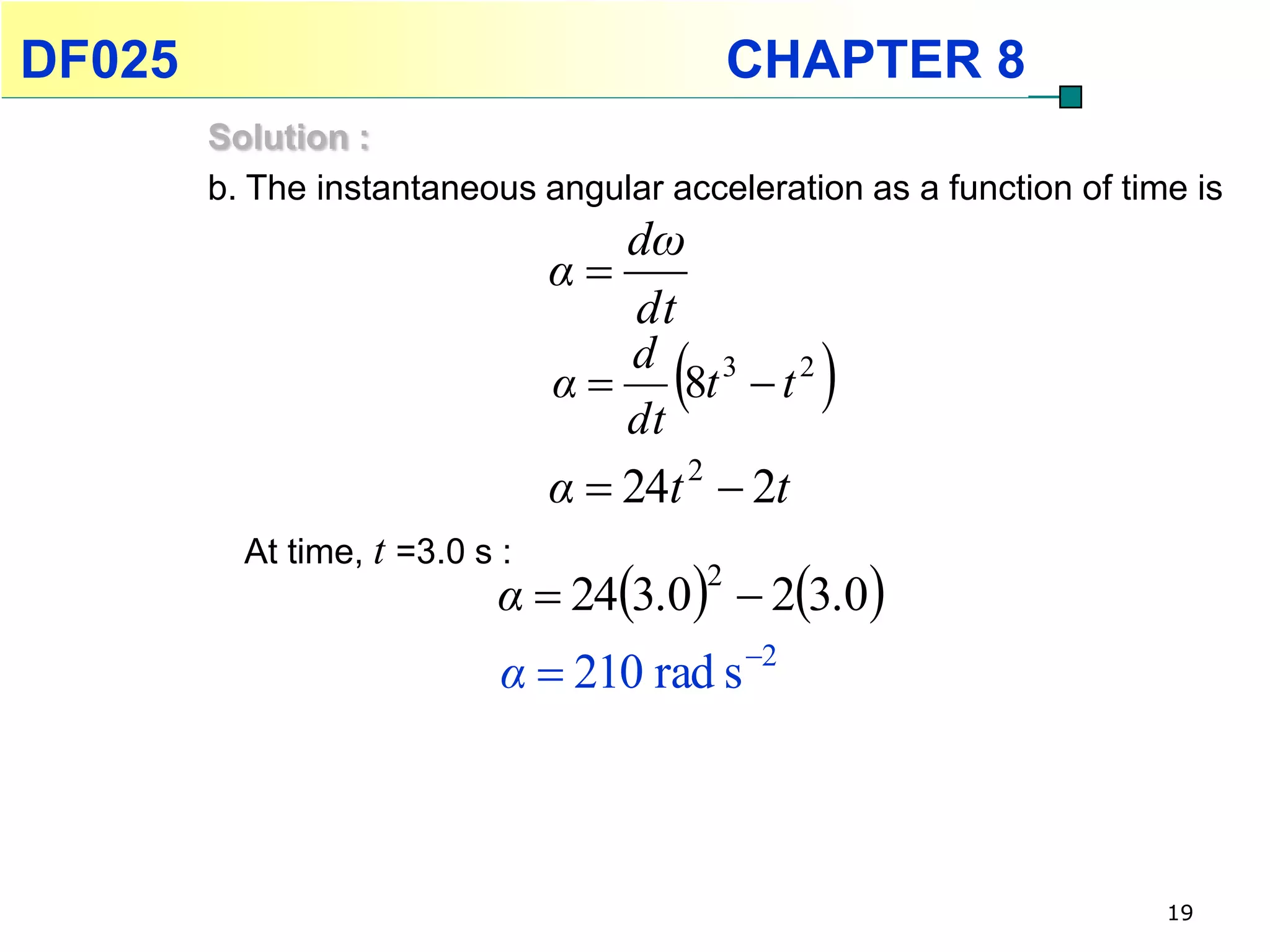
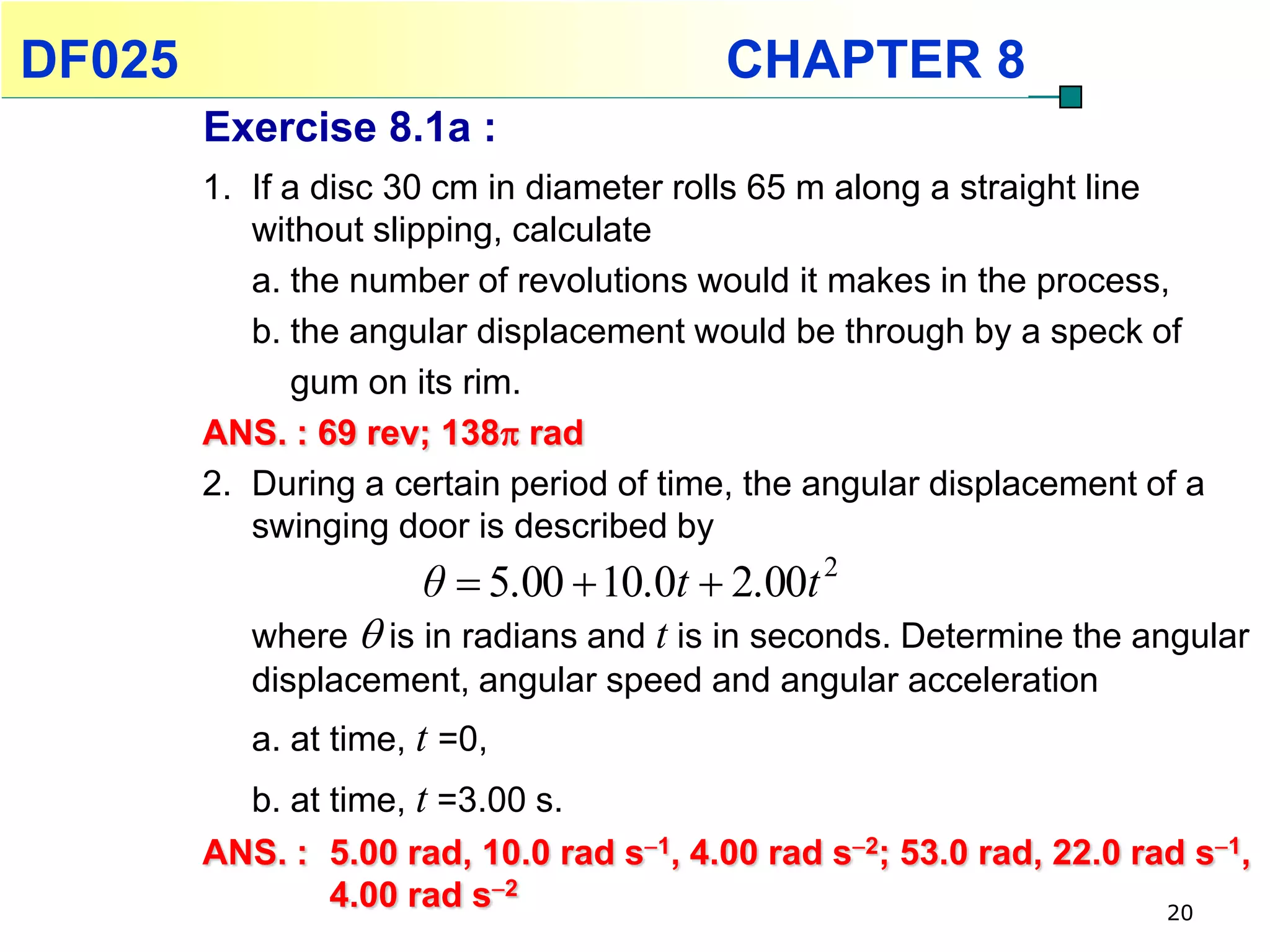
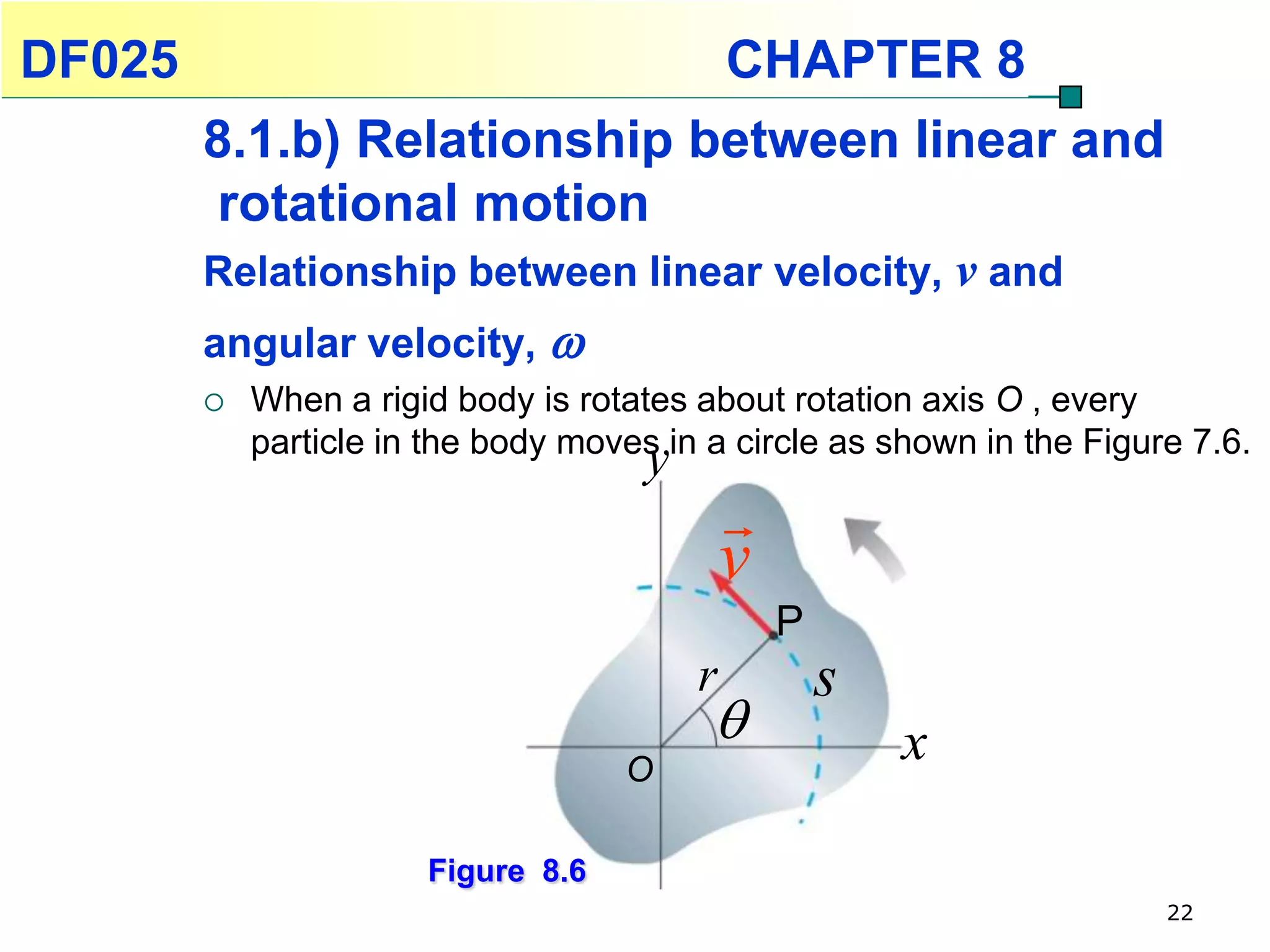
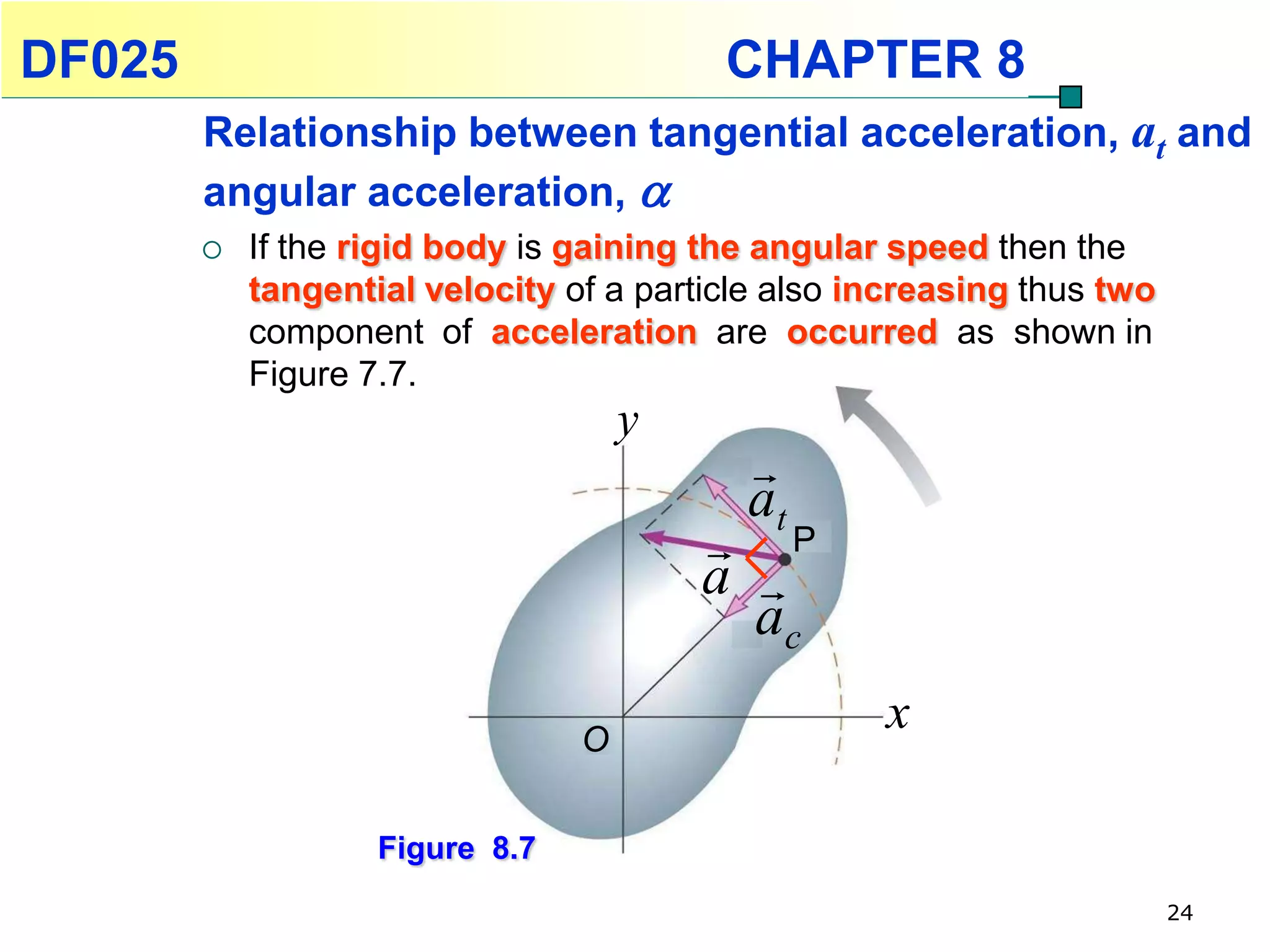
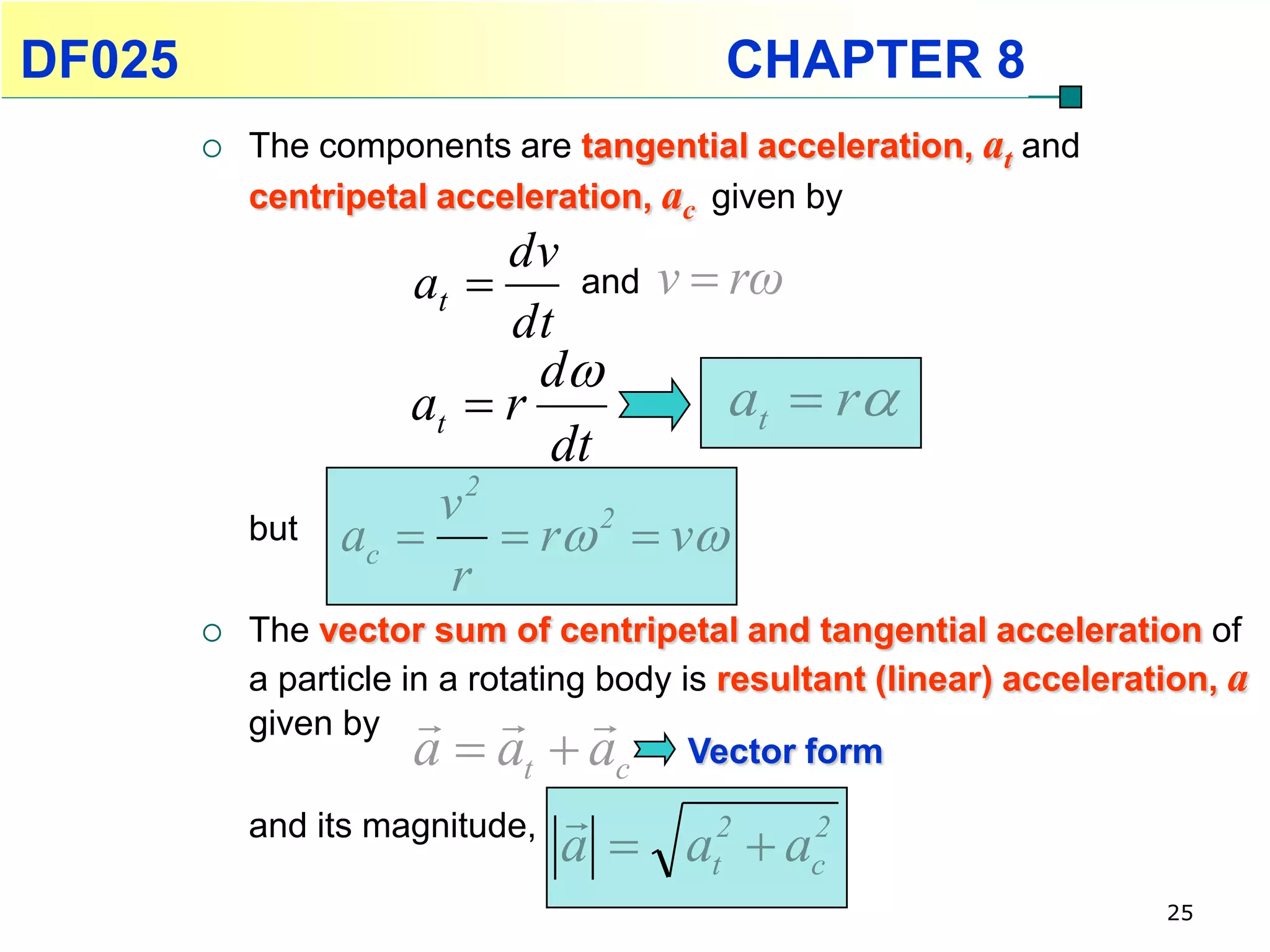
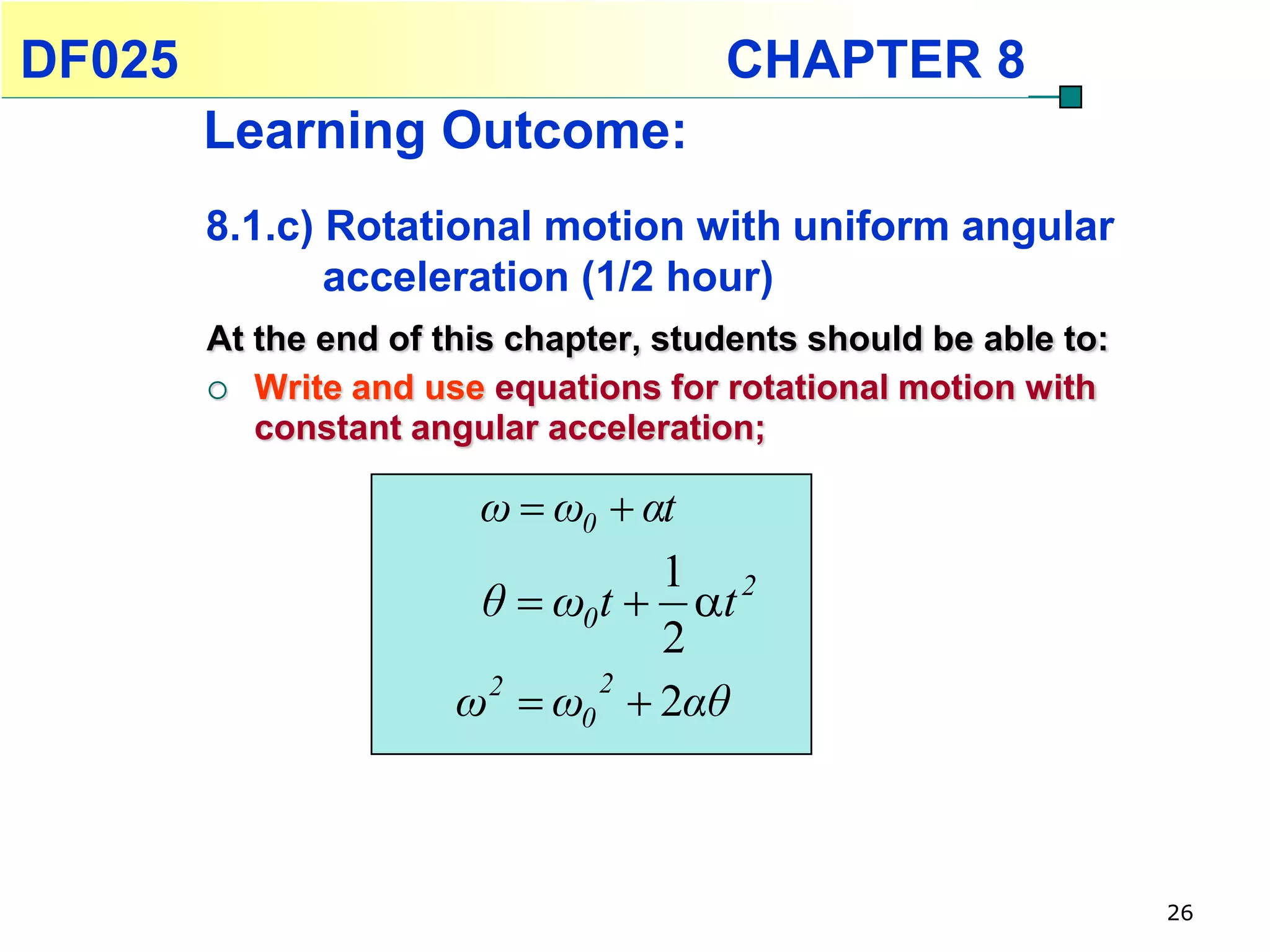
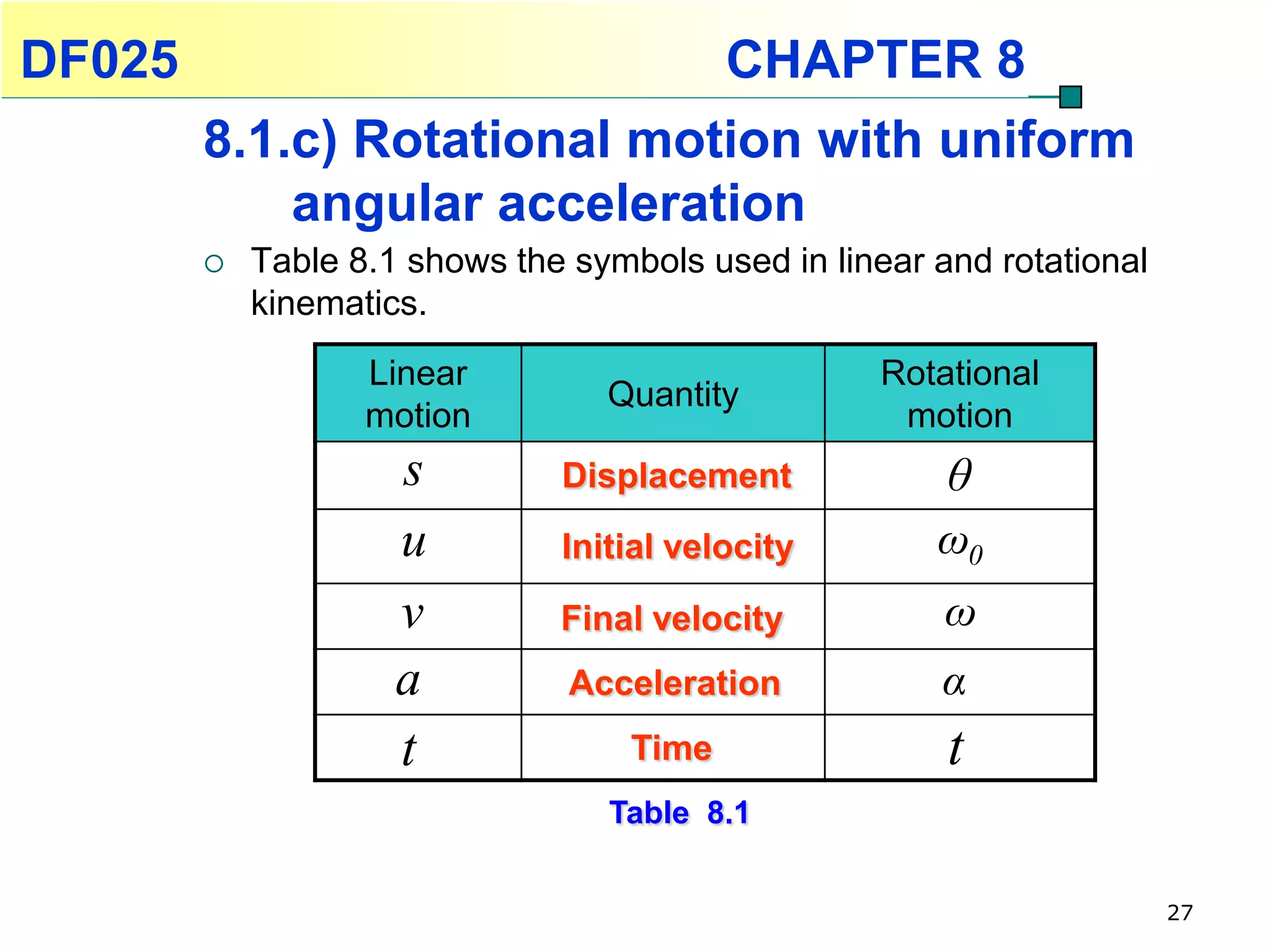
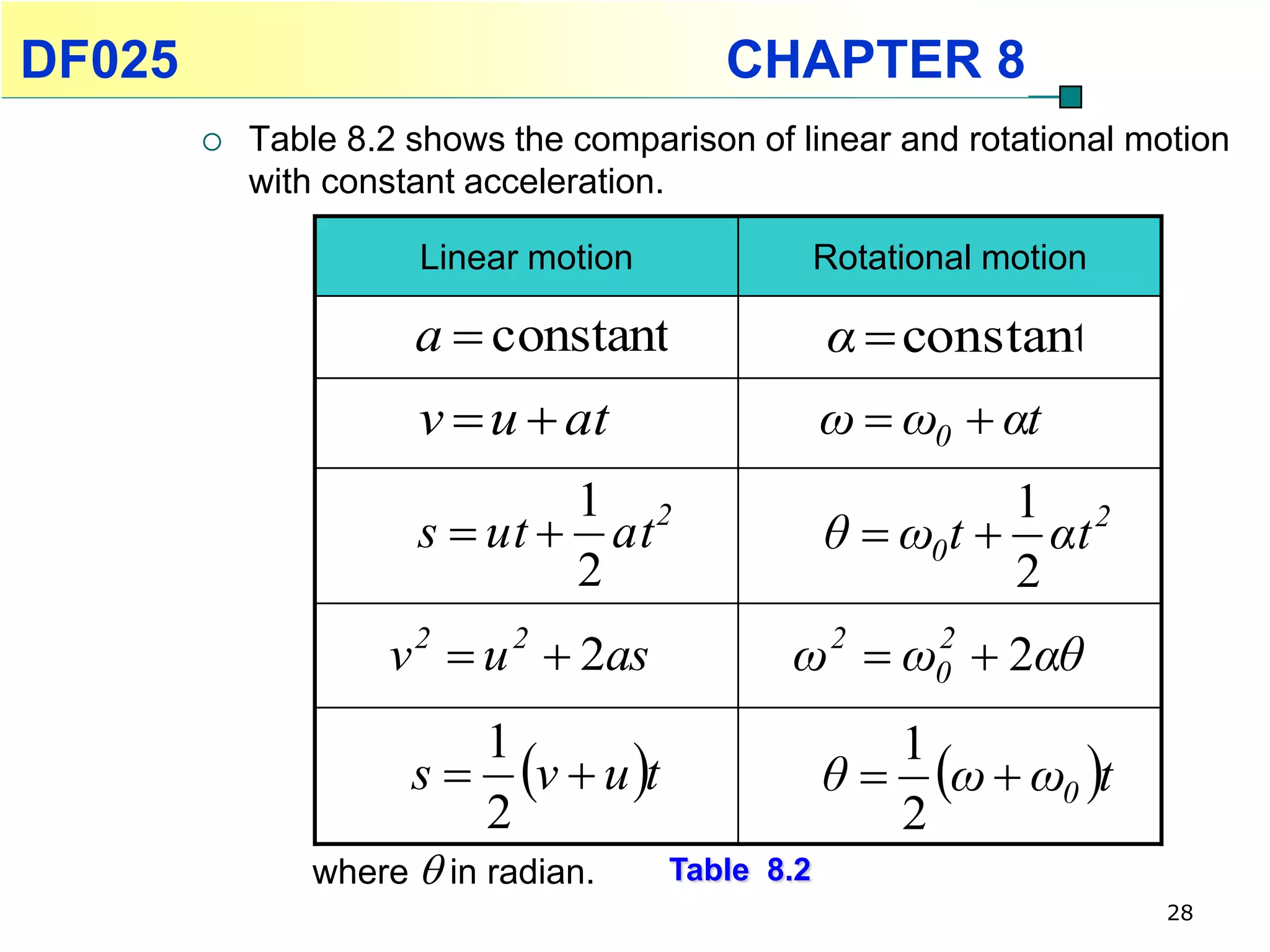
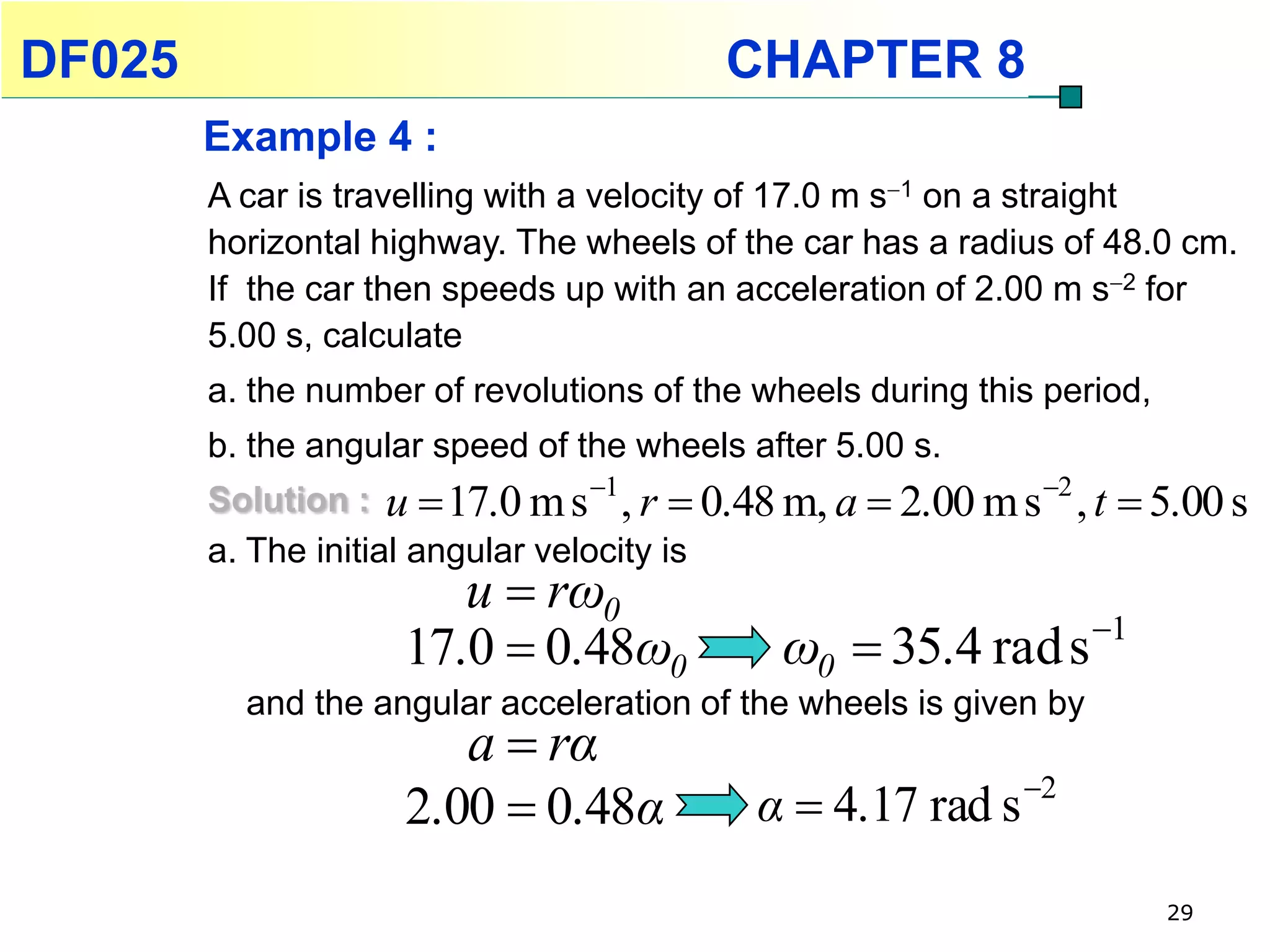
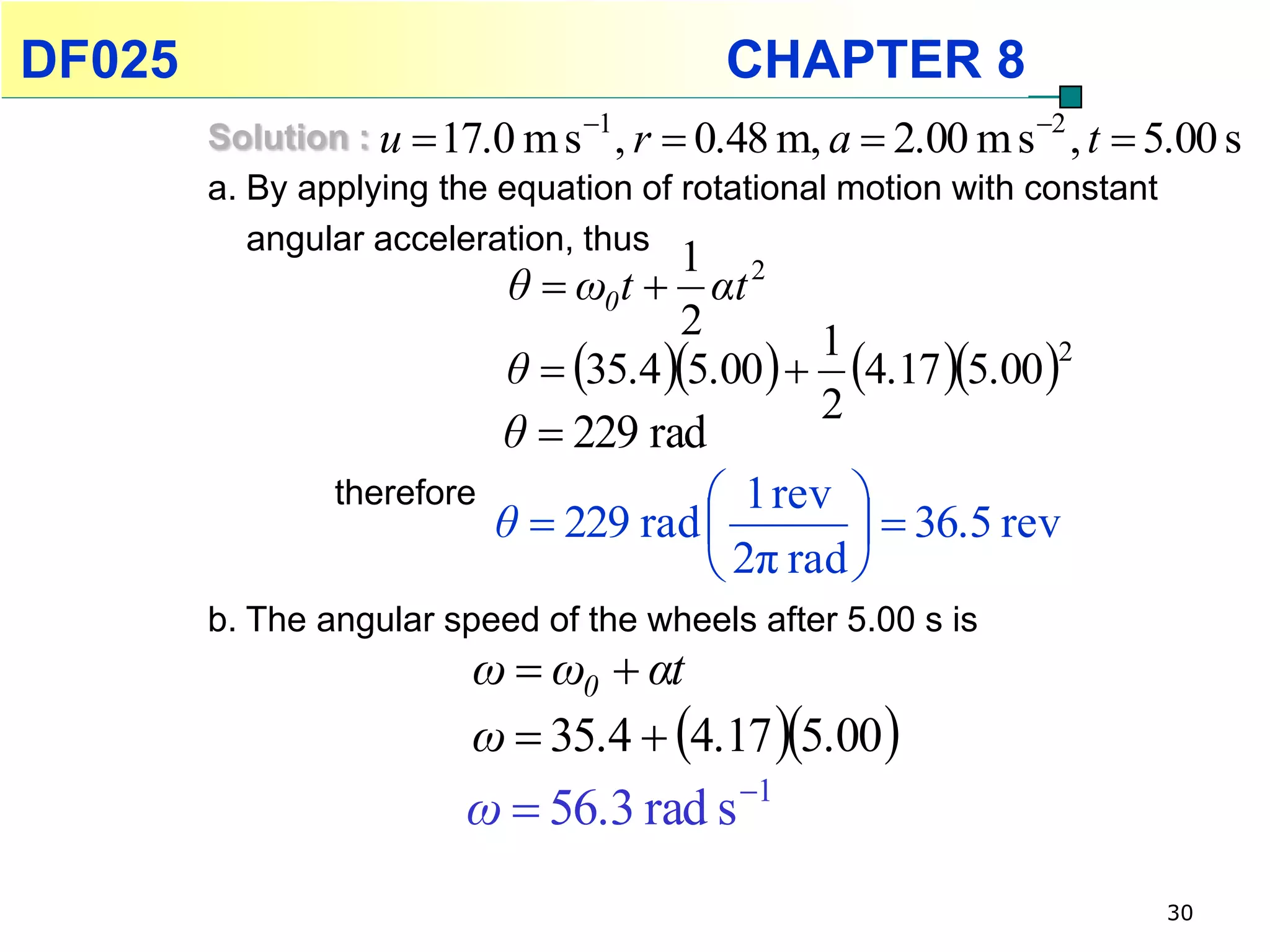
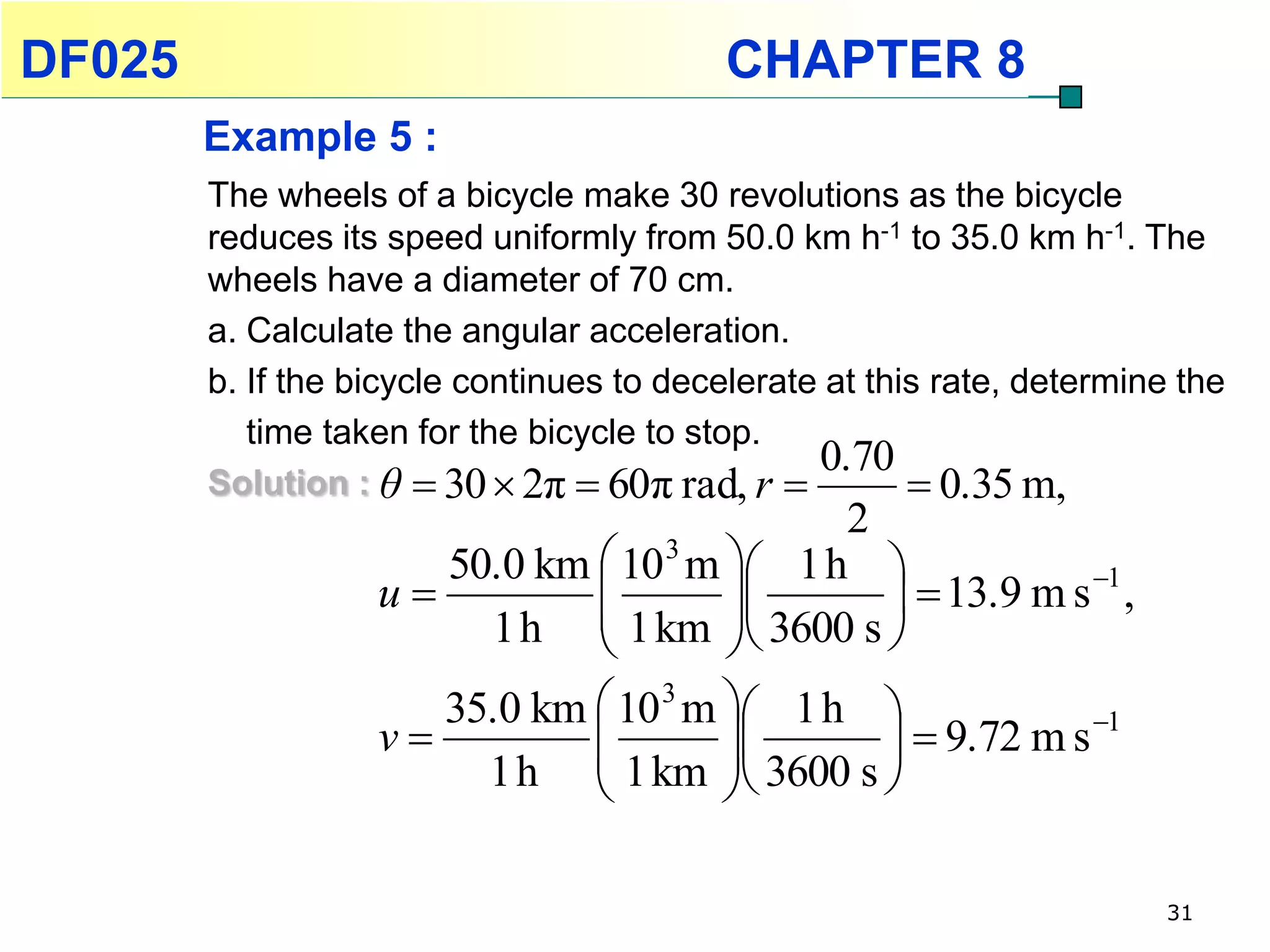
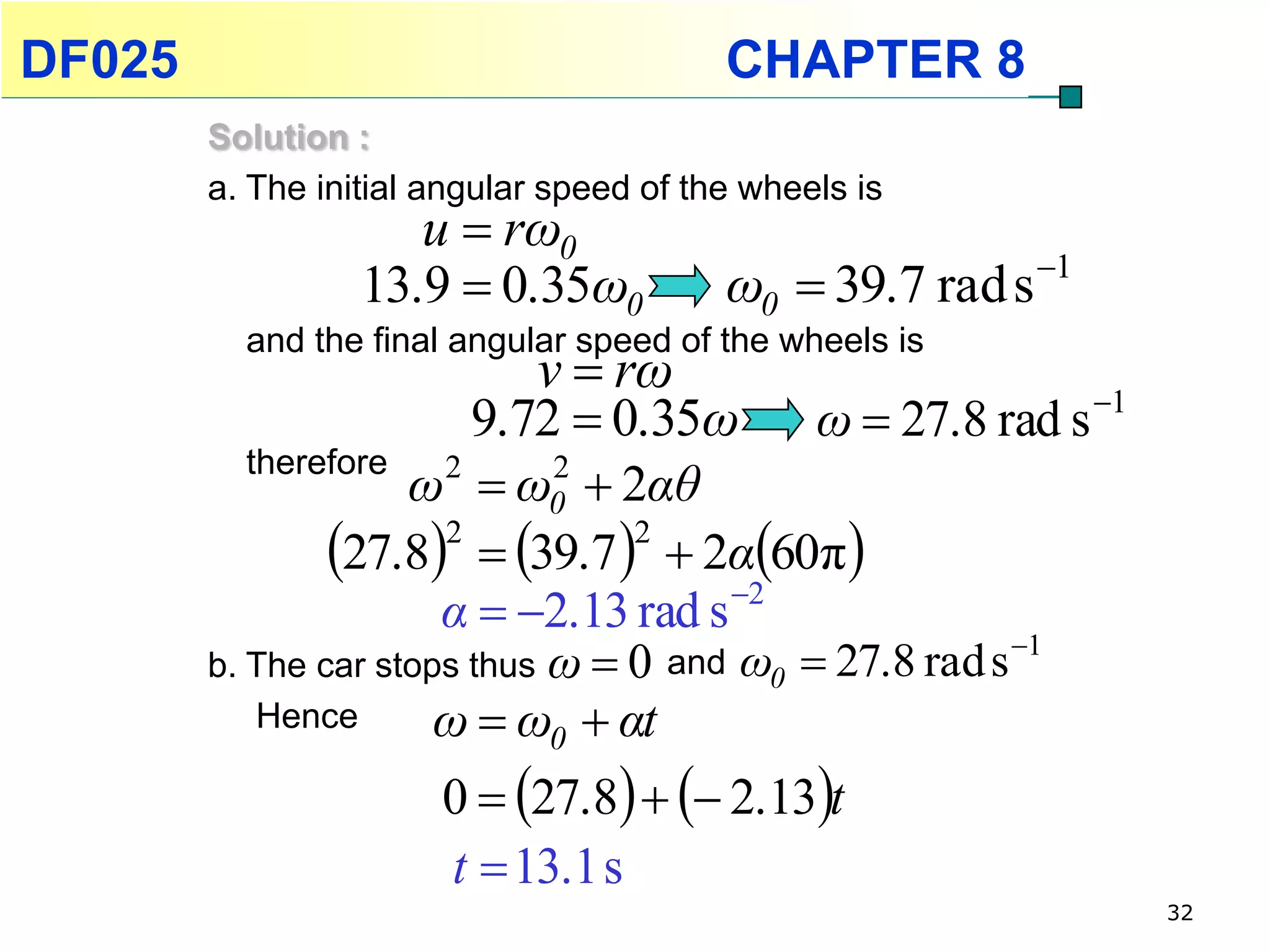
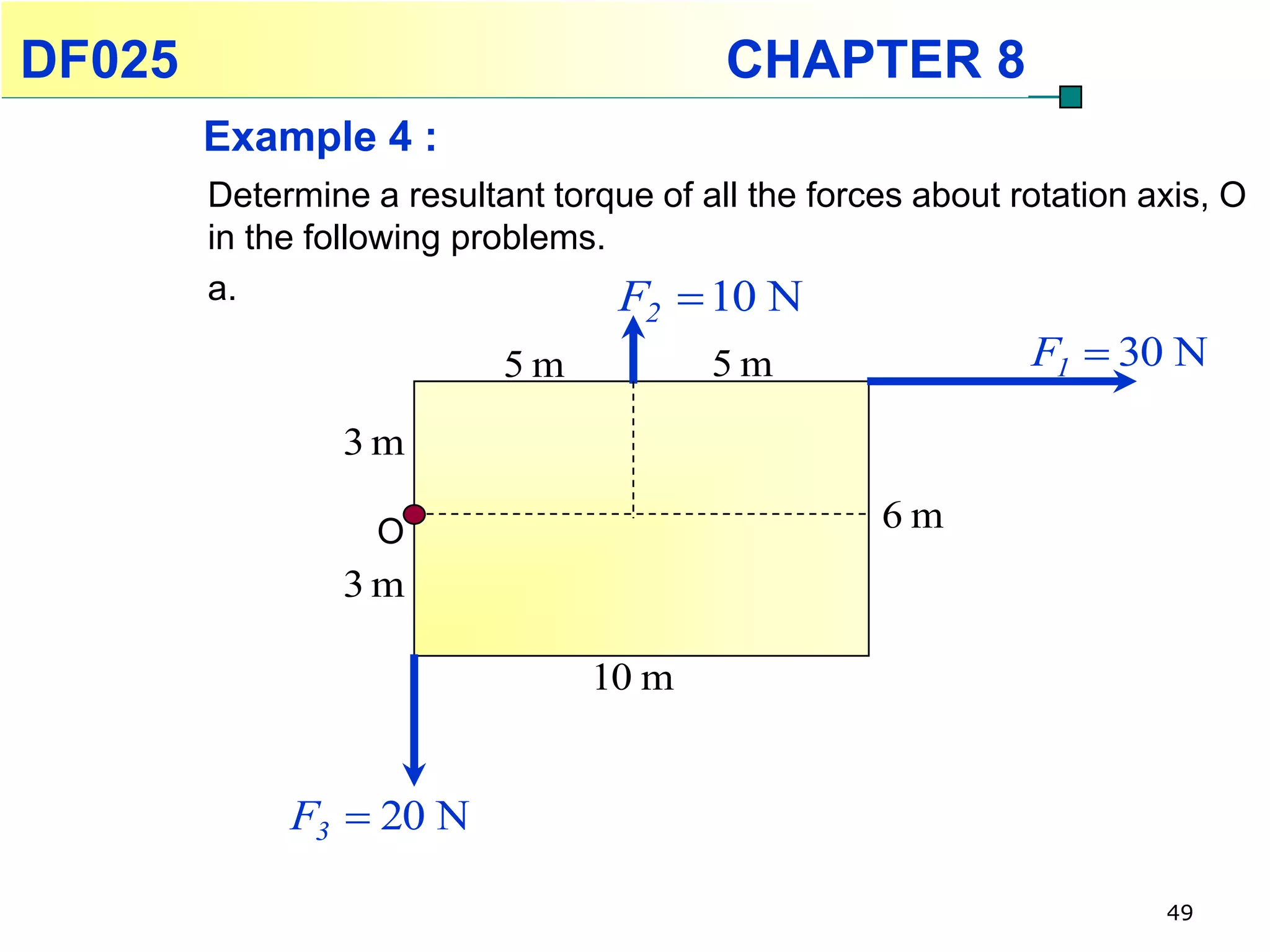
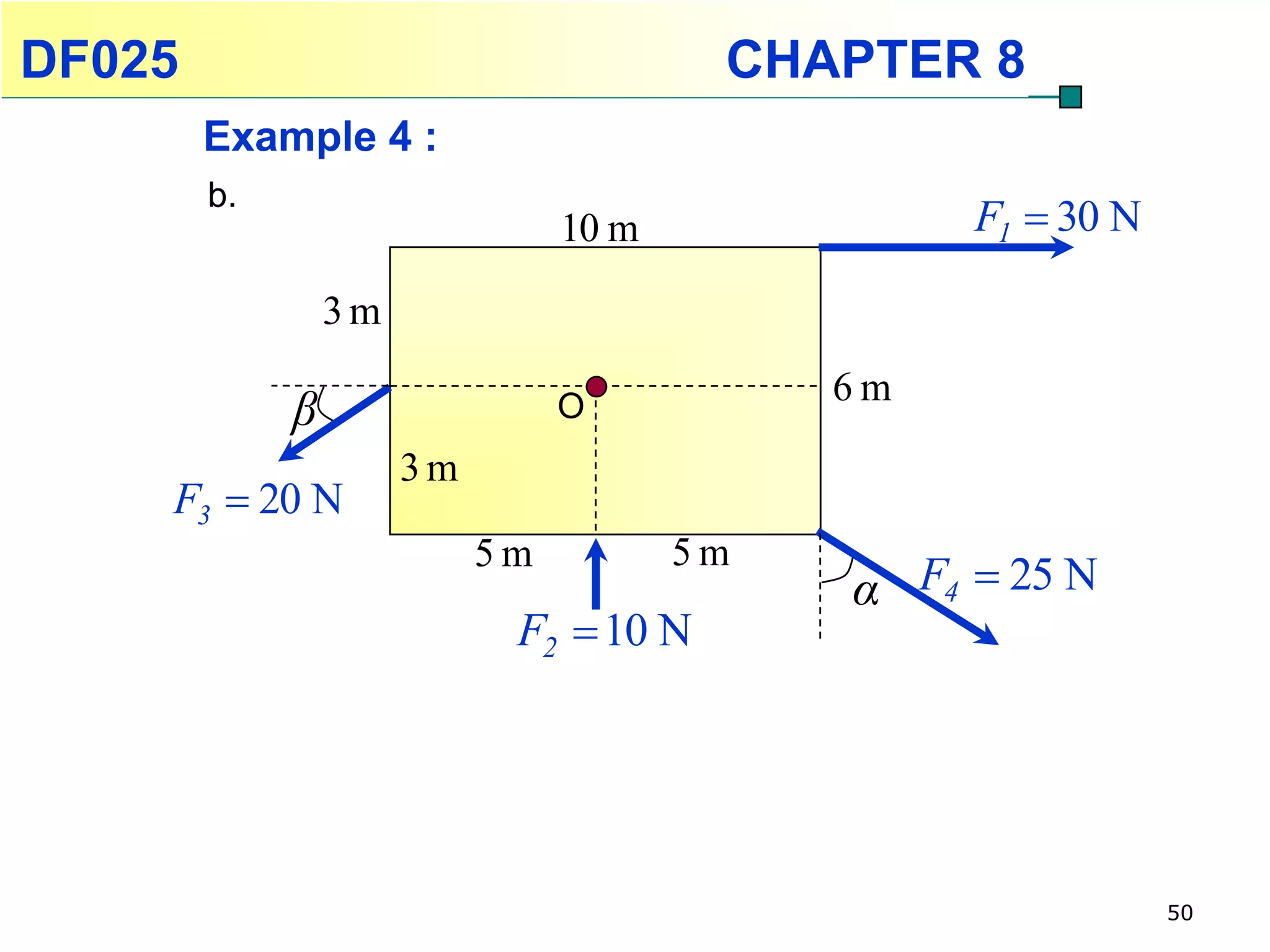
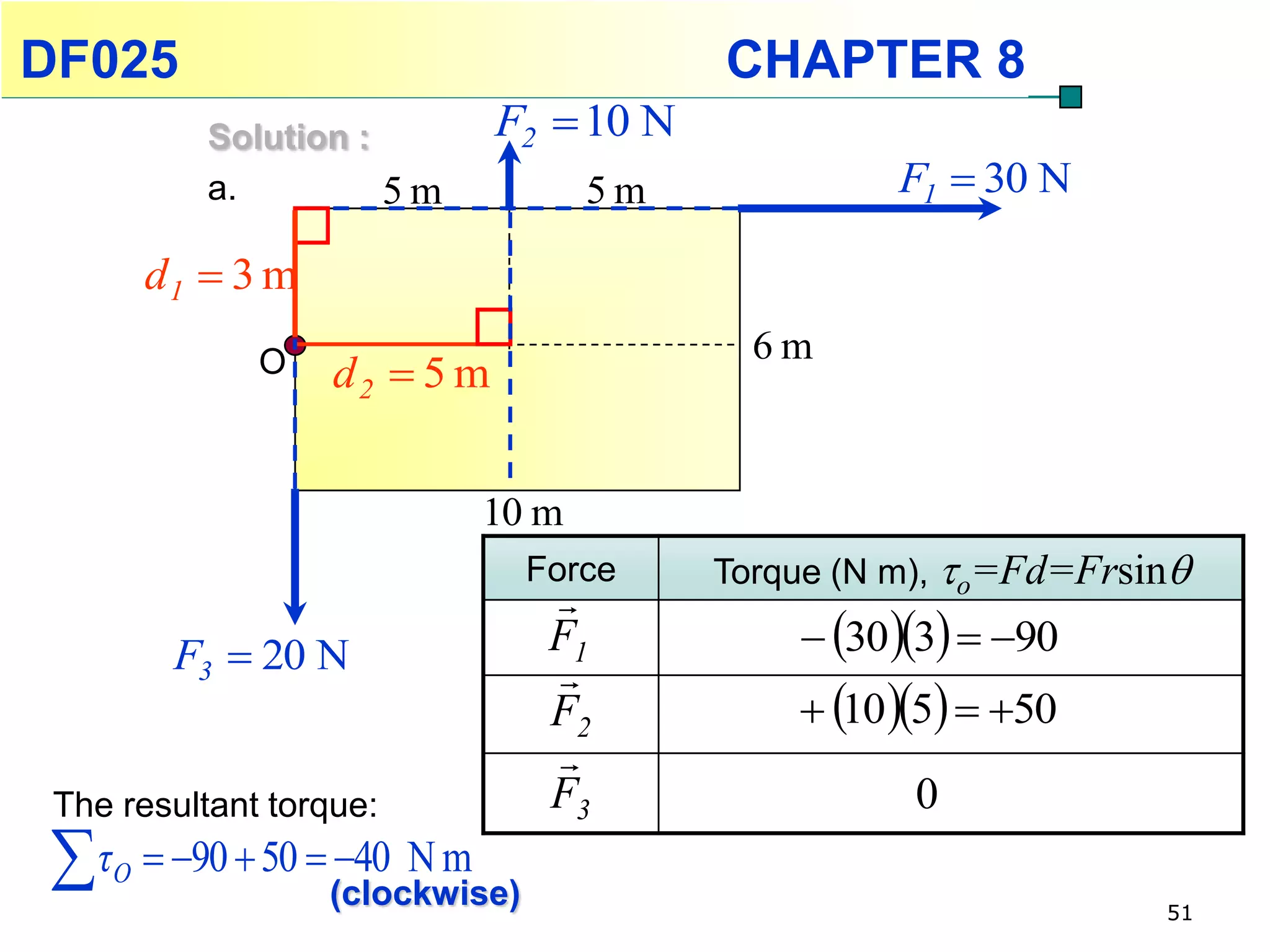
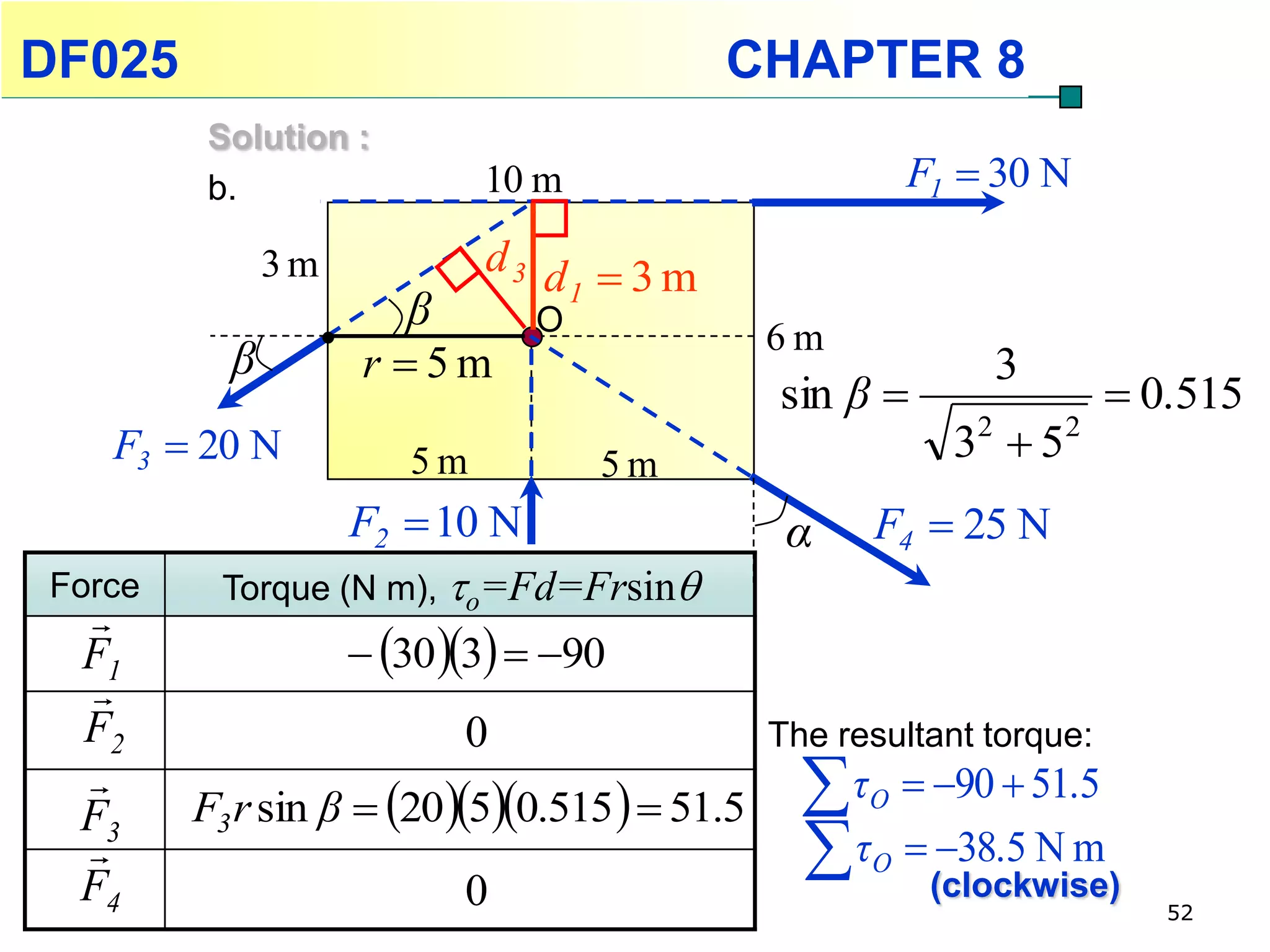
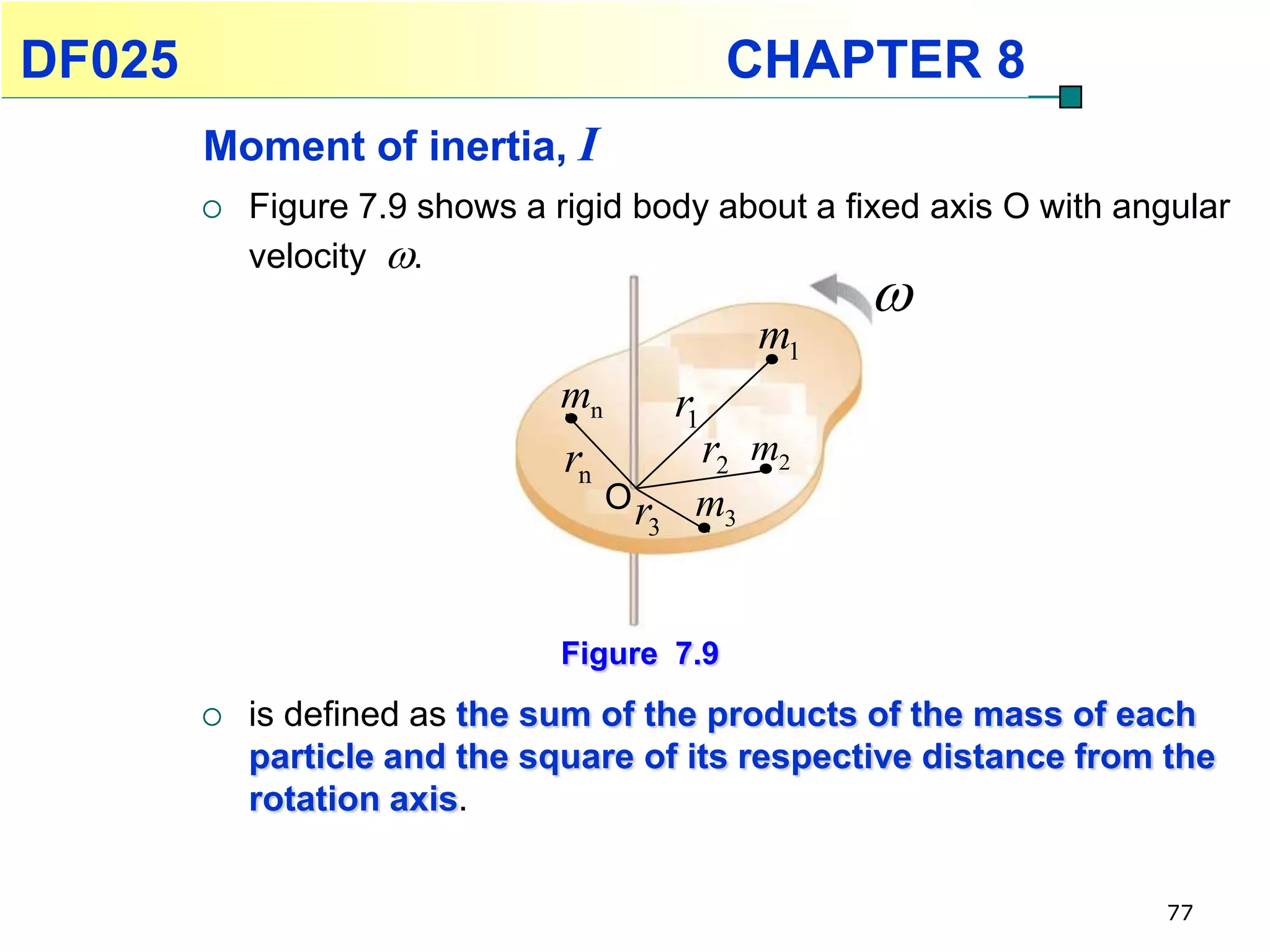
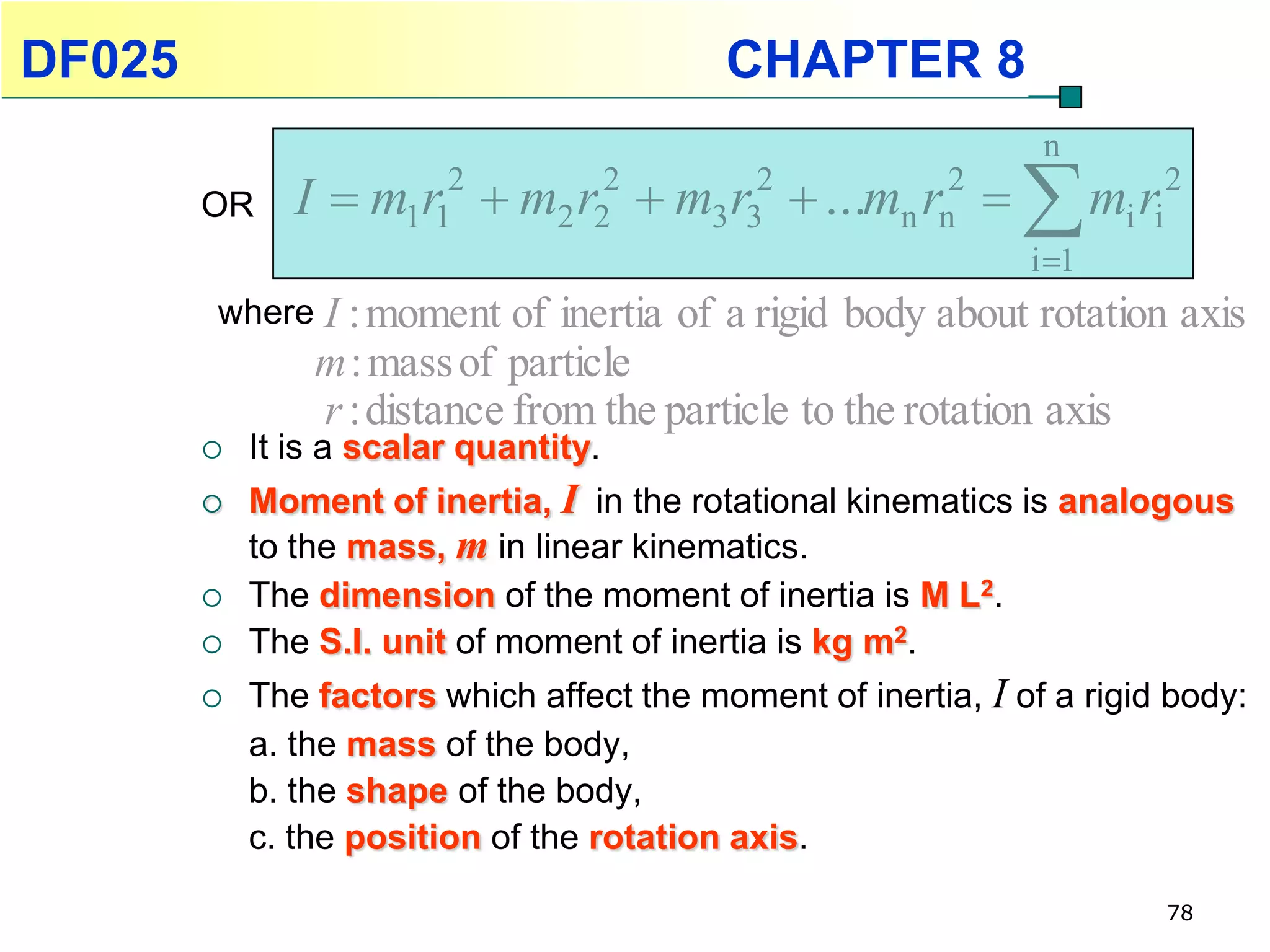
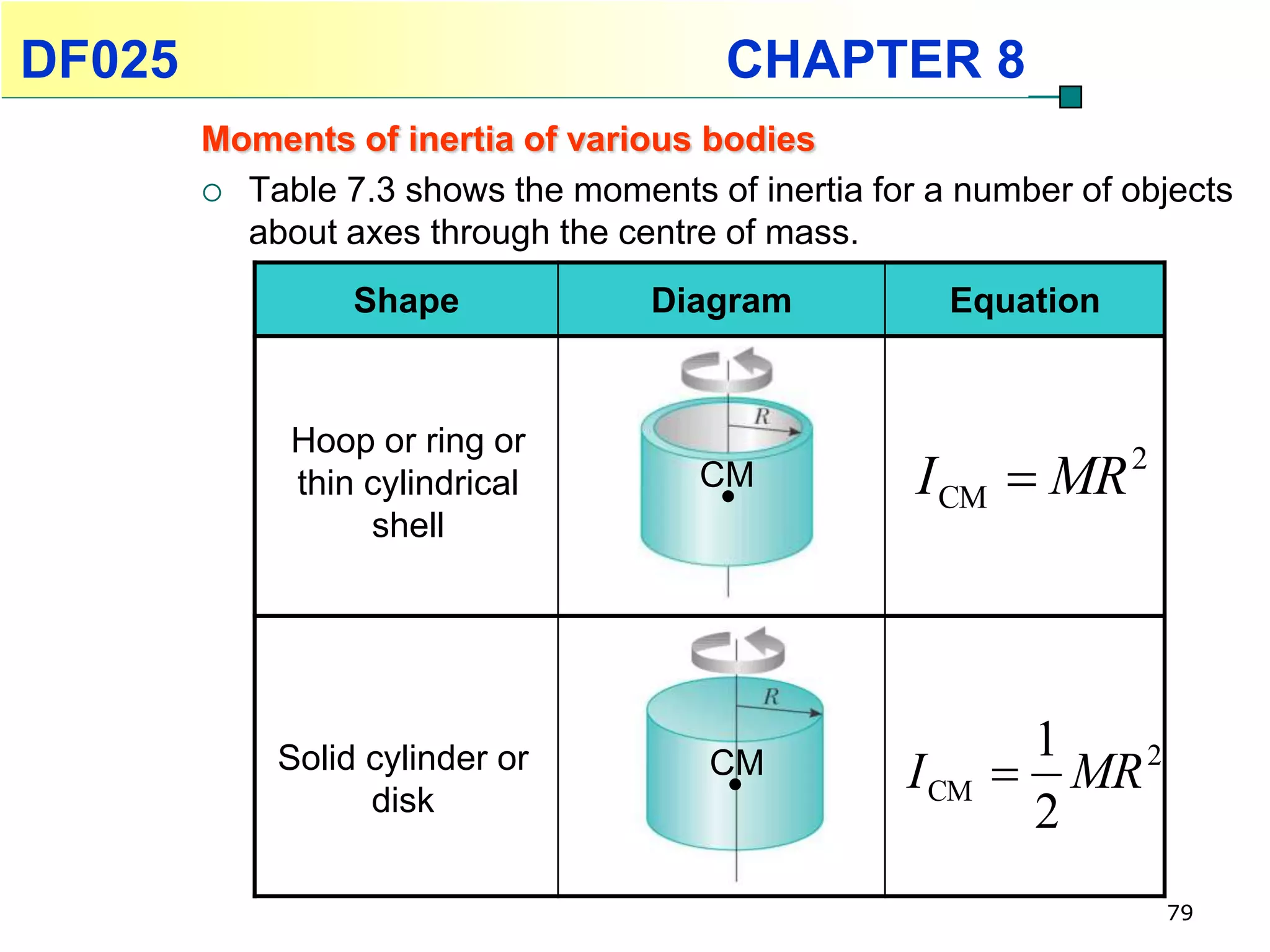
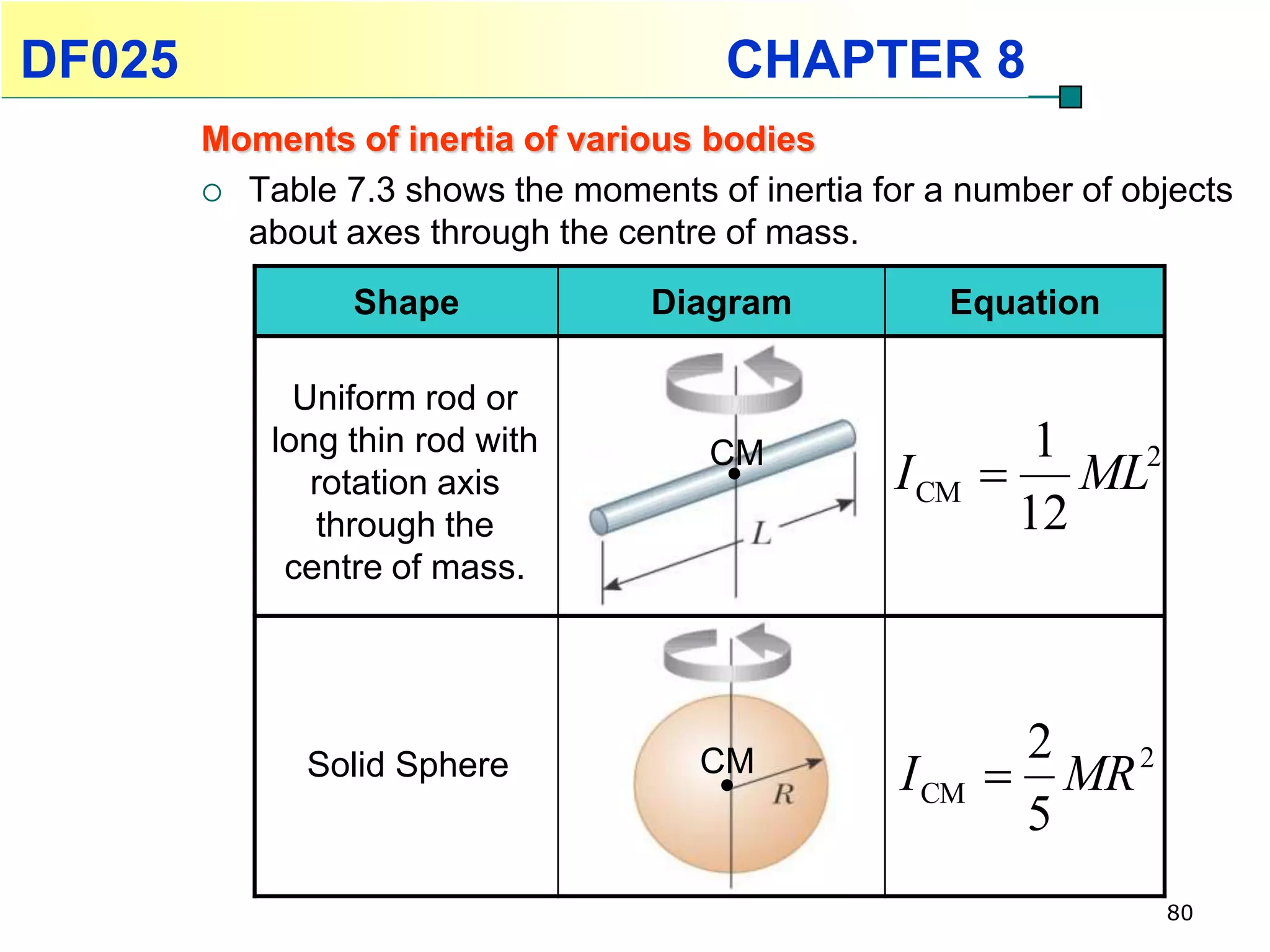
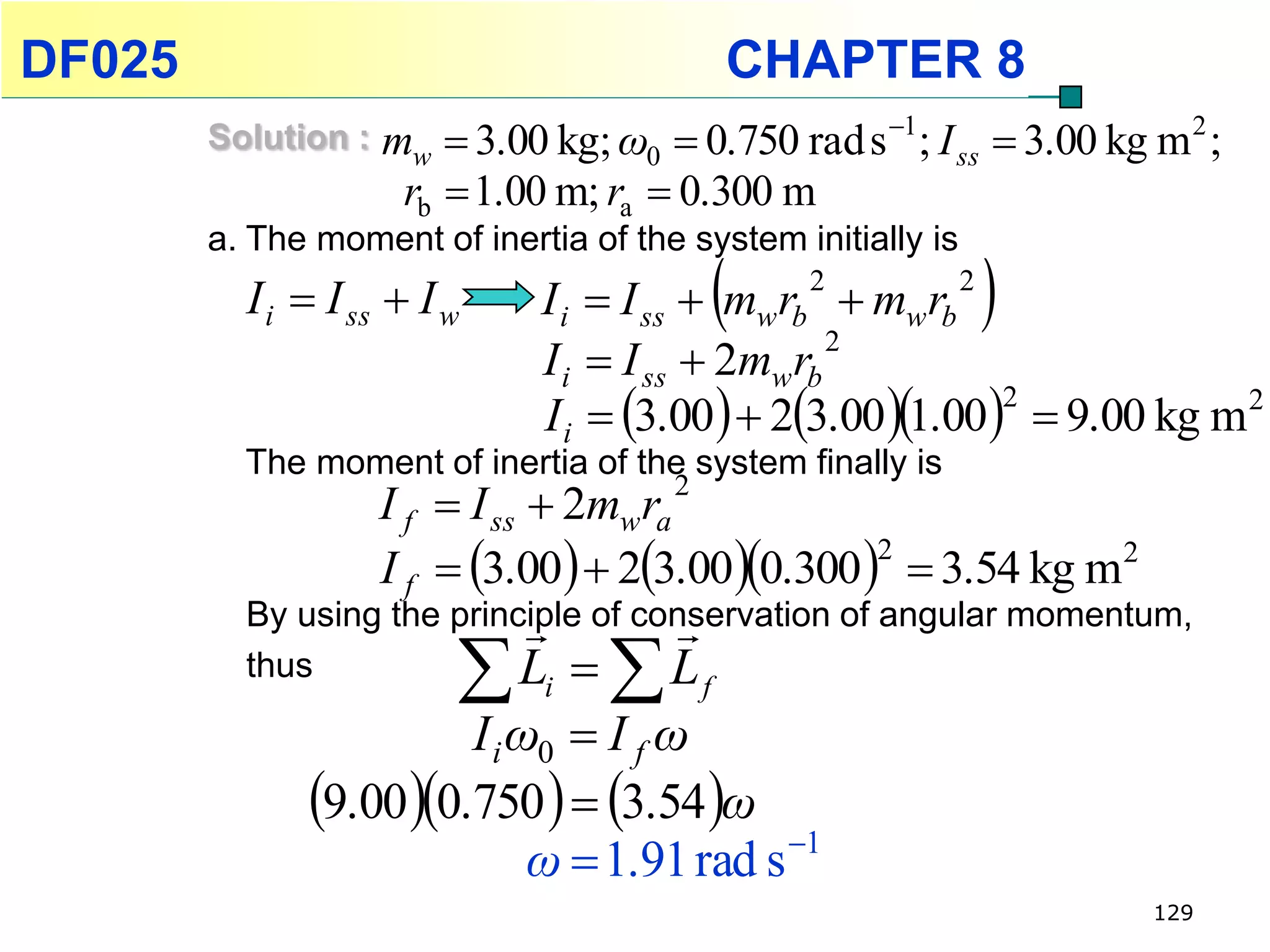
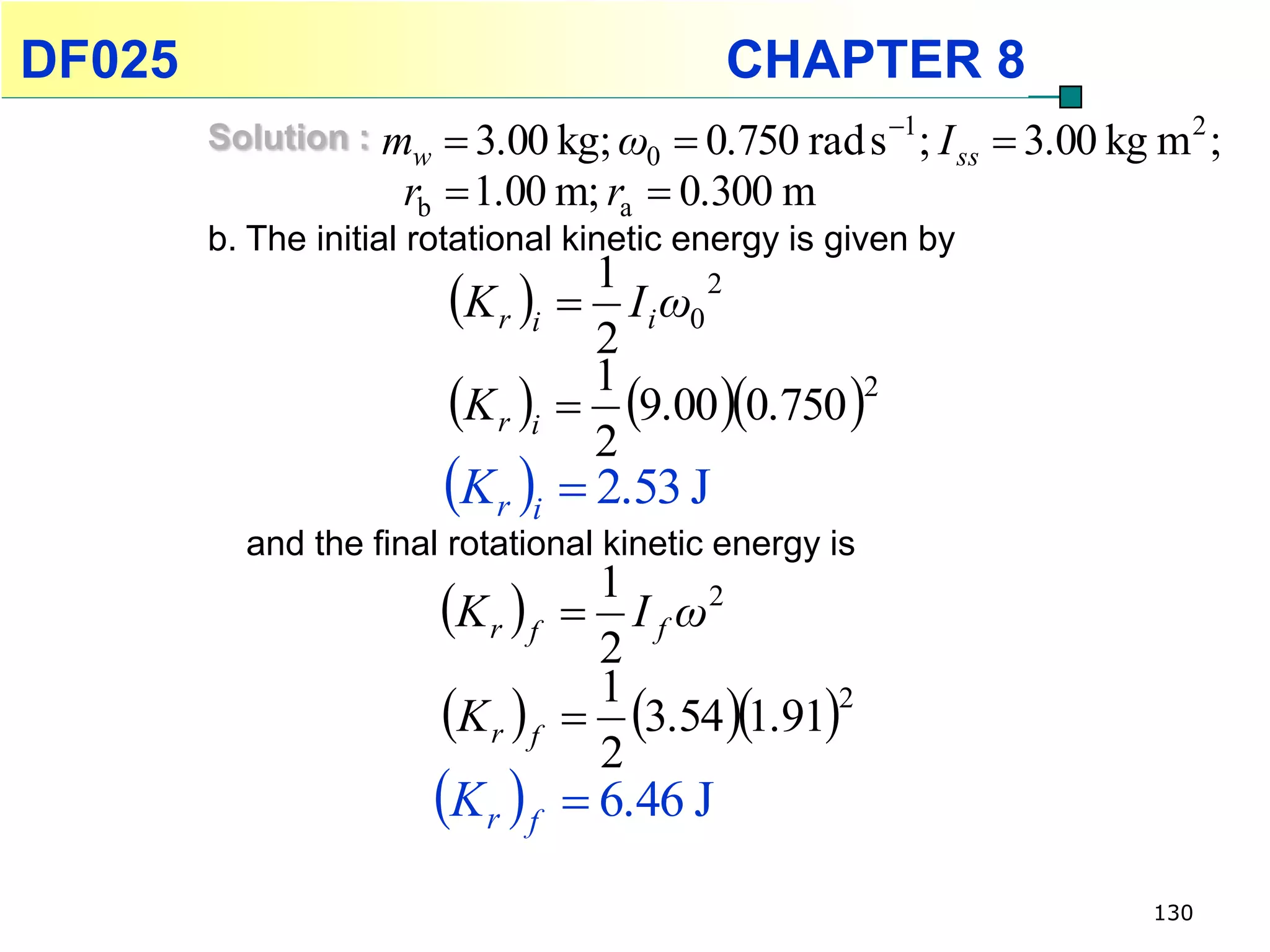
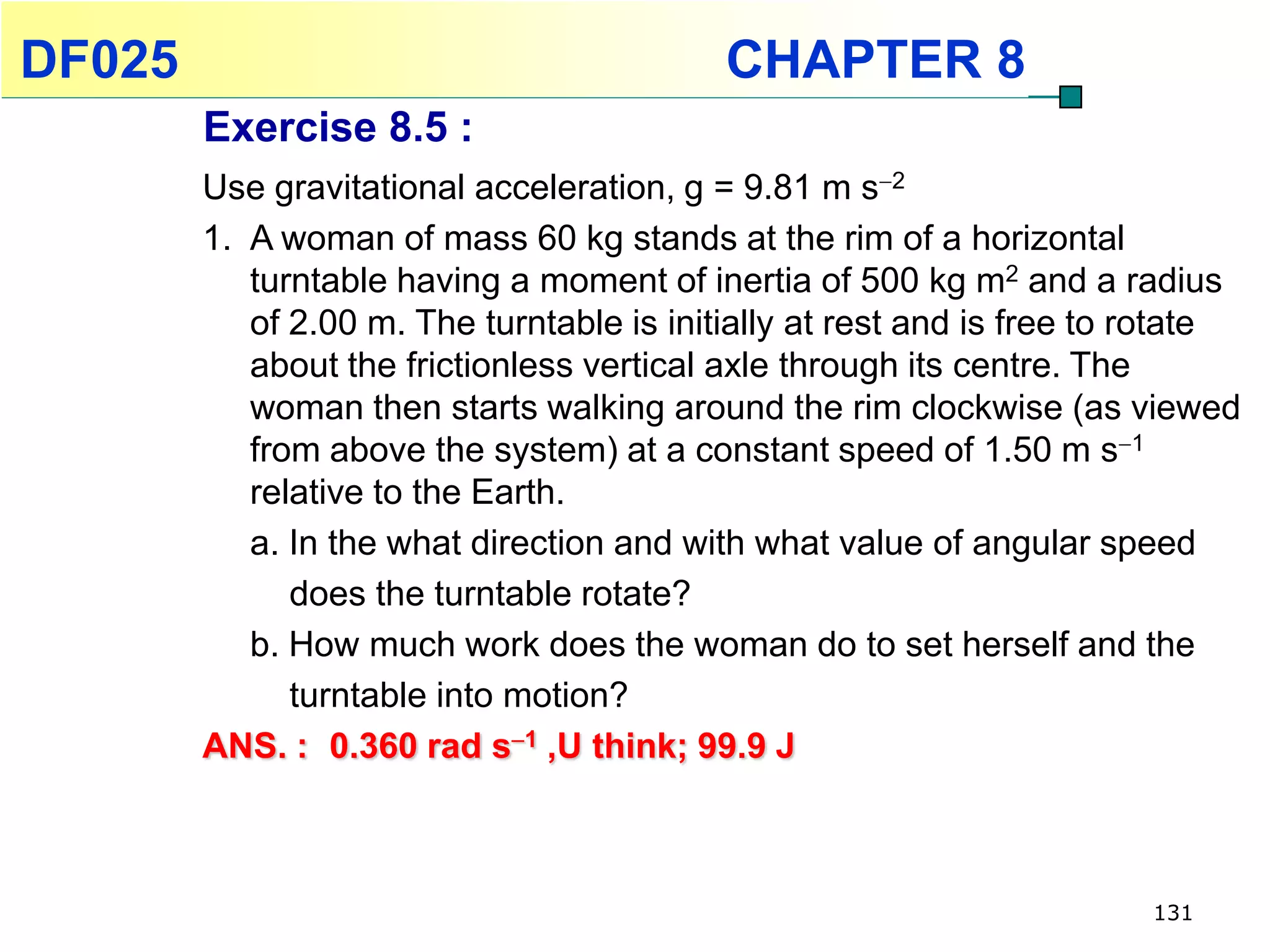
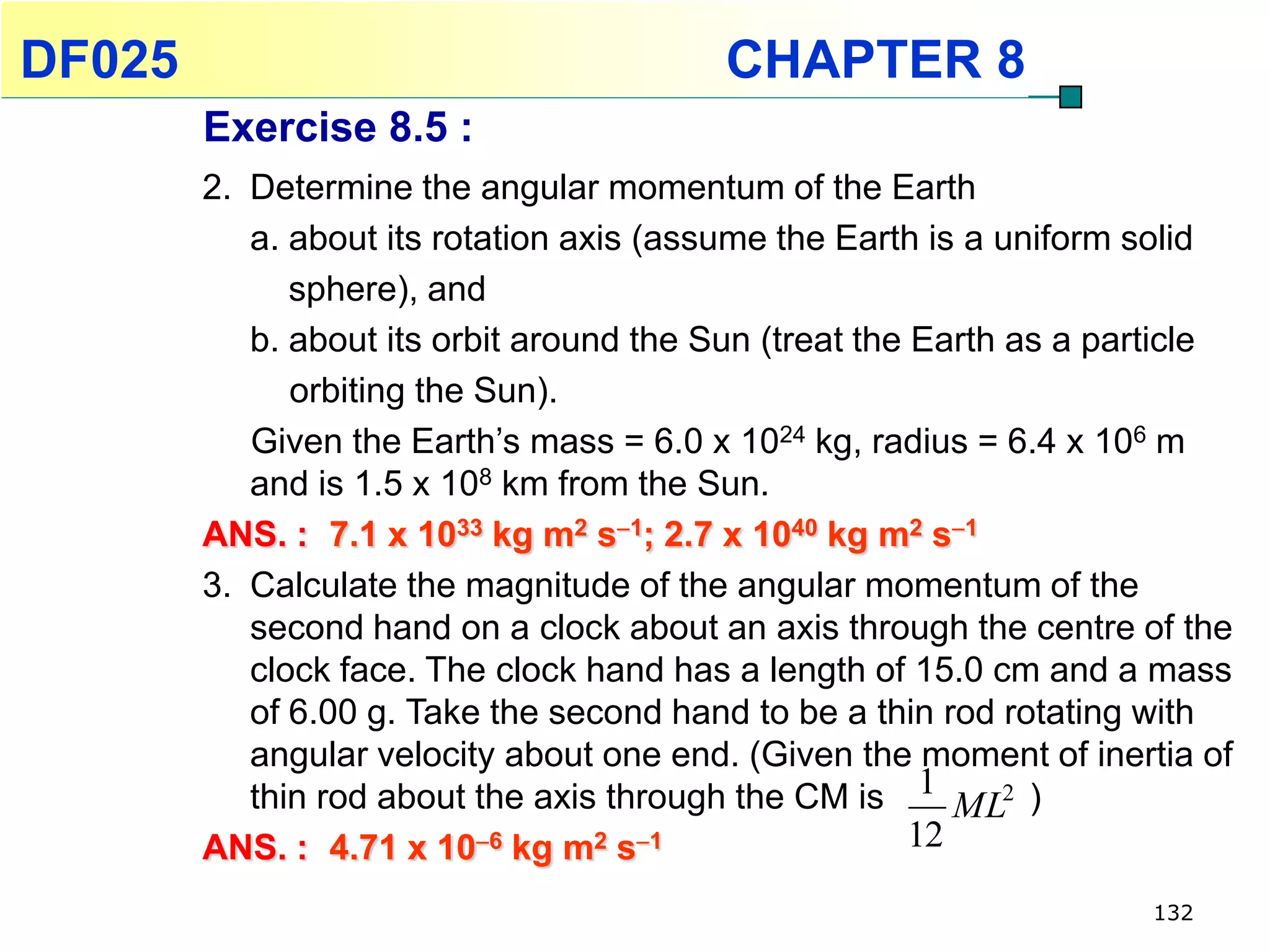
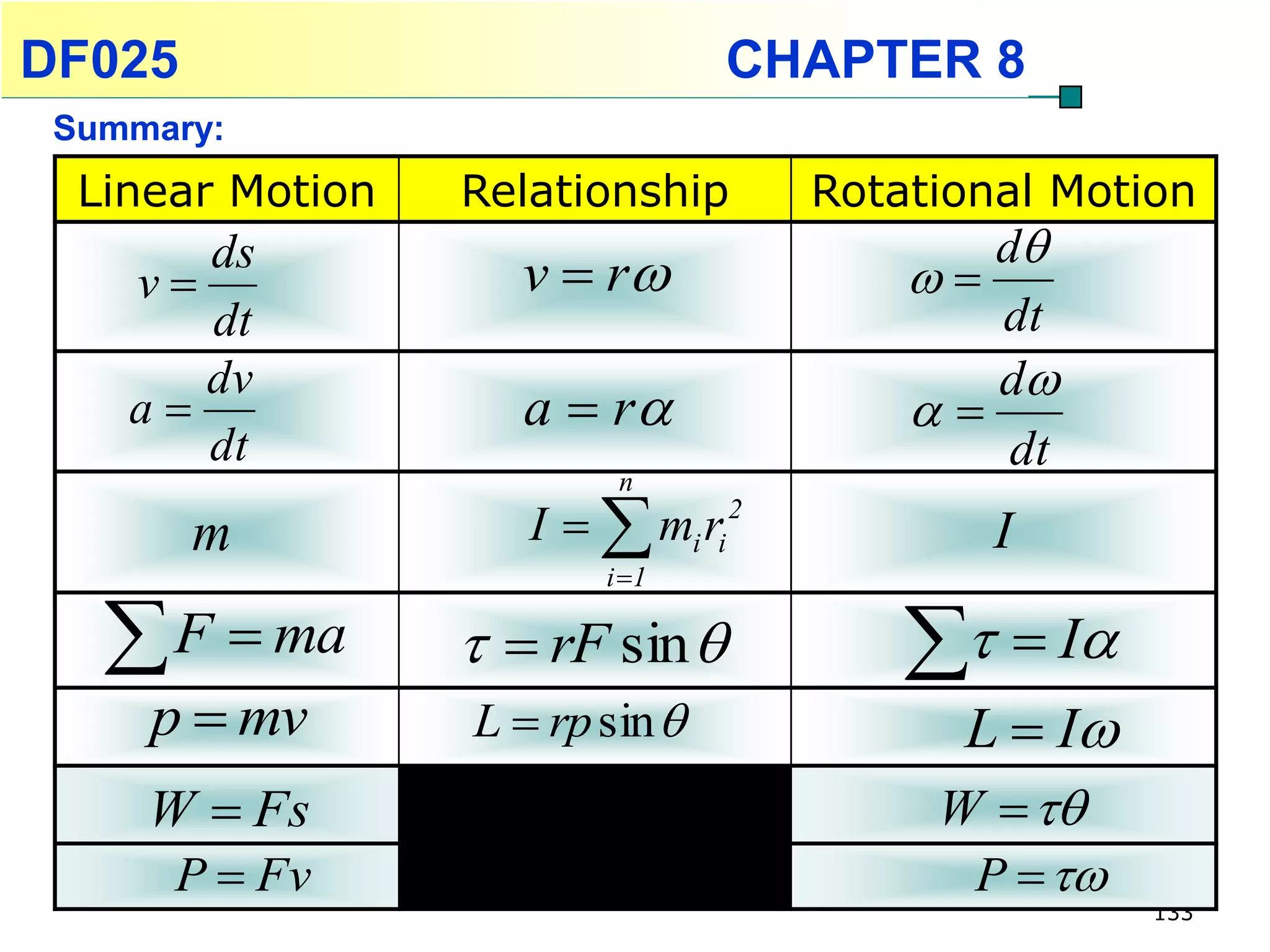

This chapter discusses rotational kinematics and the relationships between linear and rotational motion. Key concepts covered include angular displacement, velocity, and acceleration and how to define and calculate them. Equations are provided relating rotational parameters like displacement, velocity, and acceleration to their linear motion counterparts using variables like radius and arc length. Examples are given calculating values for various rotational motion situations. The chapter aims to help students understand and apply concepts of rotational kinematics.














![Struktur kristal [compatibility_mode]](https://cdn.slidesharecdn.com/ss_thumbnails/strukturkristalcompatibilitymode-150925083022-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)
















































