![BY 6533 U 2010.08.30
2
(56)
1. Патент РФ 2301399, МПК G 01B 7/30, 2007.
Полезная модель относится к электронному приборостроению и может быть непо-
средственно использована в электронных системах управления автомобилем для опреде-
ления угла нажатия педали акселератора или в других автомобильных системах,
требующих получения аналогового сигнала, сигнала широтно-импульсной модуляции или
высокоразрешающего последовательно кодируемого цифрового сигнала абсолютного уг-
лового положения вращающегося объекта.
Известен бесконтактный датчик положения педали [1], который содержит ротор с
магнитом, установленным с возможностью движения относительно неподвижного стато-
ра. Статор представляет собой программируемую интегральную схему двухосевого угло-
вого энкодера с интегрированным крестообразным массивом чувствительных элементов.
Диаметрально намагниченный магнит, образующий рабочее параллельное магнитное по-
ле, установлен во втулке с пазами под отвертку. Втулка жестко установлена по результа-
там выравнивания магнита в установочной втулке ротора с выполненной в ней
ориентирующей лыской или пазом. Угол поворота установочной втулки ограничен упо-
рами в основании корпуса и выступами установочной втулки. Поверх роторного узла
установлена крышка-ограничитель.
К недостаткам данного устройства относятся невысокая надежность, чувствитель-
ность к вибрации, недостаточные интерфейсные возможности, предварительная установка
магнита в точно ориентированном положении перед программированием, получение на
выходе одного сигнала, невозможность работать от бортсети. Отсутствие в известном
бесконтактном датчике положения педали встроенной схемы защиты ограничивает его
функциональные возможности.
Задачей, на решение которой направлена заявляемая полезная модель, является созда-
ние устройства, обладающего упрощенной конструкцией и технологией, повышенным
уровнем точности, надежности измерений и чувствительности.
Поставленная задача решается следующим образом. В устройстве бесконтактного
датчика положения педали, содержащем магнит, установленный с возможностью движе-
ния относительно неподвижного статора, представляющего собой программируемую ин-
тегральную схему с датчиком магнитного поля в виде чувствительного элемента, согласно
полезной модели, магнит выполнен прямоугольным и не ориентированным в установоч-
ной втулке ротора, датчик магнитного поля в виде магнитно-резистивного элемента уста-
новлен по центру программируемой интегральной схемы, при этом программируемая
интегральная схема снабжена схемой защиты и вторичным источником питания, а в со-
ставе схемы защиты имеется защита от переполюсовок и помех по бортовой сети авто-
транспортного средства, причем схема бесконтактного датчика положения педали
выполнена с возможностью образовывать на выходе полный и половинный сигналы, вы-
водящиеся на блок управления агрегатом автомобильного средства, с возможностью
управления при отказе одного из выходов датчика работать по сигналу со второго выхода.
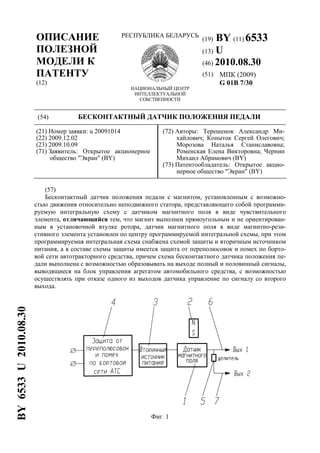
Сущность полезной модели поясняется фиг. 1 - функциональной схемой предлагаемо-
го устройства, фиг. 2 - главным видом бесконтактного датчика положения педали. Функ-
циональная схема (фиг. 1) состоит из датчика магнитного поля 1, магнита 2, вторичного
источника питания 3, схемы защиты, в составе которой имеется защита от переполюсовок
и помех по бортовой сети автотракторного средства 4, и двух выходов 6, 7, разделенных
делителем 5. Предлагаемое устройство содержит магнит 2 (фиг. 2), установленный с воз-
можностью движения относительно неподвижного статора, статор представляет собой
программируемую интегральную схему 15 (фиг. 2). Магнит 2 (фиг. 2) установлен во втул-
ке 10 с изолятором 13, закрепленной на роторе блока педали 8 (фиг. 2), движущемся отно-](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Recommended
More Related Content
What's hot
What's hot (19)
Similar to Патент на полезную модель Республики Беларусь
Similar to Патент на полезную модель Республики Беларусь (20)
More from Иван Иванов
More from Иван Иванов (20)
Патент на полезную модель Республики Беларусь
- 1. ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ (12) РЕСПУБЛИКА БЕЛАРУСЬ НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ (19) BY (11) 6533 (13) U (46) 2010.08.30 (51) МПК (2009) G 01B 7/30 (54) БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЯ ПЕДАЛИ (21) Номер заявки: u 20091014 (22) 2009.12.02 (23) 2009.10.09 (71) Заявитель: Открытое акционерное общество "Экран" (BY) (72) Авторы: Терешенок Александр Ми- хайлович; Копыток Сергей Олегович; Морозова Наталья Станиславовна; Роменская Елена Викторовна; Чернин Михаил Абрамович (BY) (73) Патентообладатель: Открытое акцио- нерное общество "Экран" (BY) (57) Бесконтактный датчик положения педали с магнитом, установленным с возможно- стью движения относительно неподвижного статора, представляющего собой программи- руемую интегральную схему с датчиком магнитного поля в виде чувствительного элемента, отличающийся тем, что магнит выполнен прямоугольным и не ориентирован- ным в установочной втулке ротора, датчик магнитного поля в виде магнитно-рези- стивного элемента установлен по центру программируемой интегральной схемы, при этом программируемая интегральная схема снабжена схемой защиты и вторичным источником питания, а в составе схемы защиты имеется защита от переполюсовок и помех по борто- вой сети автотракторного средства, причем схема бесконтактного датчика положения пе- дали выполнена с возможностью образовывать на выходе полный и половинный сигналы, выводящиеся на блок управления агрегатом автомобильного средства, с возможностью осуществлять при отказе одного из выходов датчика управление по сигналу со второго выхода. Фиг. 1 BY6533U2010.08.30
- 2. BY 6533 U 2010.08.30 2 (56) 1. Патент РФ 2301399, МПК G 01B 7/30, 2007. Полезная модель относится к электронному приборостроению и может быть непо- средственно использована в электронных системах управления автомобилем для опреде- ления угла нажатия педали акселератора или в других автомобильных системах, требующих получения аналогового сигнала, сигнала широтно-импульсной модуляции или высокоразрешающего последовательно кодируемого цифрового сигнала абсолютного уг- лового положения вращающегося объекта. Известен бесконтактный датчик положения педали [1], который содержит ротор с магнитом, установленным с возможностью движения относительно неподвижного стато- ра. Статор представляет собой программируемую интегральную схему двухосевого угло- вого энкодера с интегрированным крестообразным массивом чувствительных элементов. Диаметрально намагниченный магнит, образующий рабочее параллельное магнитное по- ле, установлен во втулке с пазами под отвертку. Втулка жестко установлена по результа- там выравнивания магнита в установочной втулке ротора с выполненной в ней ориентирующей лыской или пазом. Угол поворота установочной втулки ограничен упо- рами в основании корпуса и выступами установочной втулки. Поверх роторного узла установлена крышка-ограничитель. К недостаткам данного устройства относятся невысокая надежность, чувствитель- ность к вибрации, недостаточные интерфейсные возможности, предварительная установка магнита в точно ориентированном положении перед программированием, получение на выходе одного сигнала, невозможность работать от бортсети. Отсутствие в известном бесконтактном датчике положения педали встроенной схемы защиты ограничивает его функциональные возможности. Задачей, на решение которой направлена заявляемая полезная модель, является созда- ние устройства, обладающего упрощенной конструкцией и технологией, повышенным уровнем точности, надежности измерений и чувствительности. Поставленная задача решается следующим образом. В устройстве бесконтактного датчика положения педали, содержащем магнит, установленный с возможностью движе- ния относительно неподвижного статора, представляющего собой программируемую ин- тегральную схему с датчиком магнитного поля в виде чувствительного элемента, согласно полезной модели, магнит выполнен прямоугольным и не ориентированным в установоч- ной втулке ротора, датчик магнитного поля в виде магнитно-резистивного элемента уста- новлен по центру программируемой интегральной схемы, при этом программируемая интегральная схема снабжена схемой защиты и вторичным источником питания, а в со- ставе схемы защиты имеется защита от переполюсовок и помех по бортовой сети авто- транспортного средства, причем схема бесконтактного датчика положения педали выполнена с возможностью образовывать на выходе полный и половинный сигналы, вы- водящиеся на блок управления агрегатом автомобильного средства, с возможностью управления при отказе одного из выходов датчика работать по сигналу со второго выхода. Сущность полезной модели поясняется фиг. 1 - функциональной схемой предлагаемо- го устройства, фиг. 2 - главным видом бесконтактного датчика положения педали. Функ- циональная схема (фиг. 1) состоит из датчика магнитного поля 1, магнита 2, вторичного источника питания 3, схемы защиты, в составе которой имеется защита от переполюсовок и помех по бортовой сети автотракторного средства 4, и двух выходов 6, 7, разделенных делителем 5. Предлагаемое устройство содержит магнит 2 (фиг. 2), установленный с воз- можностью движения относительно неподвижного статора, статор представляет собой программируемую интегральную схему 15 (фиг. 2). Магнит 2 (фиг. 2) установлен во втул- ке 10 с изолятором 13, закрепленной на роторе блока педали 8 (фиг. 2), движущемся отно-
- 3. BY 6533 U 2010.08.30 3 сительно неподвижного статора с датчиком магнитного поля 1 (фиг. 1) в виде магнитно- резистивного элемента 14 (фиг. 2), в центре на программируемой интегральной схеме 15 (фиг. 2) располагаются схема защиты и вторичный источник питания 3 фиг. 1, в составе схемы защиты имеется защита от переполюсовок и помех по бортовой сети автотрактор- ного средства 4 фиг. 1. Колпачок 9 (фиг. 2) служит защитой втулки 10 (фиг. 2), блока пе- дали 8 (фиг. 2), механически связанного с ножной педалью акселератора автотракторного средства, относительное движение которой вызывает образование сигнала, пропорцио- нального перемещению магнита 2 (фиг. 2), который заливается или вклеивается в изоля- тор 13 фиг. 2. Параллельно лицевой поверхности программируемой интегральной схемы 15 (фиг. 2) установлен датчик магнитного поля 1 (фиг. 1) в виде магнитно-резистивного элемента 14 (фиг. 2) со вторичным источником питания 3 (фиг. 1). В составе схемы защи- ты имеется защита от переполюсовок и помех по бортовой сети автотракторного средства 4 (фиг. 1). Блок педали 8 (фиг. 2), закрепленный на втулке 10 (фиг. 2), устанавливается в нулевом положении, затем программируется программируемая интегральная схема 15 (фиг. 2), после окончания сборочного процесса программируется выходной разъем (на фи- гурах не показан), первое программирование производится на программируемой инте- гральной схеме 15 (фиг. 2), а затем по выходам 6, 7 (фиг. 1). Поверх роторного узла устанавливается крышка-ограничитель 16 (фиг. 2), жестко фиксируемая в корпусе 11 (фиг. 2), поверх роторного узла. Бесконтактный датчик положения педали работает следующим образом. Нулевую точку магнит 2 (фиг. 2) схема запоминает в любом случае. Нулевая точка по команде за- поминает перемещение блока педали 8 (фиг. 2), относительно нулевой точки при переме- щении блока педали 8 (фиг. 2) измеряется угол поворота датчика магнитного поля 1 (фиг. 1). При изменении положения полюсов магнита 2 (фиг. 2) изменяются параметры датчика магнитного поля 1 (фиг. 1) и соответственно на выходах 6, 7 (фиг. 1) меняется значение напряжения, которое пропорционально углу поворота блока педали 8 (фиг. 2) и, соответ- ственно, углу поворота датчика магнитного поля 1 (фиг. 1), при этом выходной сигнал на выходе 6 (фиг. 1) в два раза больше, чем на выходе 7 (фиг. 1). Это обеспечивает делитель 5 (фиг. 1). В исходное положение блок педали 8 (фиг. 2) возвращается с помощью встро- енной пружины 12 (фиг. 2). Сигнал выводится на жгут 17 (фиг. 2) и затем передается на разъем и блок управления бортсети агрегатом автомобильного средства (на фигурах не показан). При нажатии ножной педали акселератора бесконтактный датчик положения педали передает показания перемещения педали относительно угла поворота блока педали 8 (фиг. 2). При перемещении педали поворачивается датчик магнитного поля 1 (фиг. 1), и в начальное положение педаль возвращает пружина 12 (фиг. 2). Для исключения поврежде- ния схемы защиты, при неправильной подаче питания, в соответствии с ГОСТ 28751-90, в составе схемы защиты имеется защита от переполюсовок и помех по бортовой сети авто- тракторного средства 4 (фиг. 1). Бесконтактный датчик положения педали производит на выходах 6, 7 (фиг. 1) полный и половинный аналоговые сигналы, в случае повторной перепроверки сигнал может дуб- лироваться. Бесконтактный датчик положения педали можно сделать с цифровым сигналом в виде кода с интерфейсом. Предлагаемый бесконтактный датчик положения педали устойчив к вибрации, обла- дает расширенными интерфейсными возможностями, возможностью работать от бортсе- ти, получением двух сигналов на выходе, при сборке не требуется предварительная установка магнита в точно ориентированном положении перед программированием. Наличие в бесконтактном датчике положения педали встроенной схемы защиты от пере-
- 4. BY 6533 U 2010.08.30 4 полюсовок и помех по бортовой сети автотракторного средства расширяет его функцио- нальные возможности. Таким образом, данное устройство обладает упрощенной конструкцией и технологией сборки и монтажа, более точным измерением, имеет простую и дешевую схему сборки, то есть данное устройство применимо. Предлагаемый бесконтактный датчик положения пе- дали уже может быть освоен промышленностью в настоящее время. Заявителем изготов- лена опытная партия бесконтактных датчиков положения педали. Проведенные стендовые испытания и испытания в условиях эксплуатации показали надежность бесконтактных датчиков положения педали по сравнению с аналогичными устройствами, применяемыми в настоящее время. Принято решение о серийном производстве указанных бесконтактных датчиков положения педали. Фиг. 2 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.