
Recommended
More Related Content
What's hot
Similar to ИМПУЛЬСНЫЙ РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ
Similar to ИМПУЛЬСНЫЙ РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ (18)
More from Иван Иванов
More from Иван Иванов (20)
ИМПУЛЬСНЫЙ РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ
- 1. ИМПУЛЬСНЫЙ РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМИ ЭЛЕКТРОДВИГАТЕЛЯМИ « Э Н Е Р Г И Я » МОСКВА 1972
- 2. 6П2.1.081 И 54 у .V УДК 62-83:621.314.632 Авторы: Э. В. Шикуть, |М . И. Крайцберг|, П. А. Фукс, А. Э. Газганов И 54 Импульсный регулируемый электропривод с фаз ными электродвигателями. М., «Энергия», 1972. 104 с. с ил. На обороте тит. л. авт.: Э. В. Шикуть, М. И. Крайцберг, П. А. Фукс, А. Э. Газганов. в книге рассматриваются пр)1нципы и конструктивные особенности импульсных асинхронных электроприводов с тиристорными коммутато рами. В этих электроприводах тиристоры применяются как быстродей ствующие бесконтактные коммутационные аппараты с высокими энер гетическими и технико-экономическими показателями. Исследованы основные схемы импульсных асинхронных электро приводов, получены расчетные формулы для выбора параметров эле ментов привода, выявлены основные энергетические показатели. Рас смотрены статические и динамические характеристики. Книга предназначена для инженерно-технических работников, за нимающихся проектированием, наладкой, исследованием и эксплуата цией систем автоматизированного электропривода. 3-3-10 201-72 6П2.1.081 Эргард Васильевич Шикуть, Меер Ицкович Крайцберг, Павел Авраамович Фукс, Александр Эммануилович Газганов Импульсный регулируемый электропривод с фазными электродвигателями Редактор А. В. Ш и н я н с к и й . Редактор издательства М. И. Н и к о л а е в а Обложка художника В. И. К а р п о в а Технический редактор Г. Г. Х а ц к е в и ч Корректор Е. В. Ж и т о м и р с к а я Сдано в набор 31/V I11 1971 г. Подписано к печати 8/11 1972 г. Т-01541 Формат 84X108Vs2 Бумага типографская № 2 Уел. печ. л. 5,46 Уч.-изд. л. 5,84 Тираж 8 000 экз. Цена 29 коп. Зак. 348 Издательство „Энергия*. Москва, М-114, Шлюзовая наб., 10. Московская типография № 10 Главполиграфпрома Комитета по печати пои Совете Министров СССР.
- 3. П Р Е Д И С Л О В И Е Быстрое развитие в 1Коице 50-х годов электроники .при вело к созданию силовых лолупроводниковых неу'пра.вля- емых и управляемых вентилей, что ознаменовало собой важный рубеж в развитии управляемого электропривода. Появилась практическая .возможность осуществления устройств для преобразования, регулирования и комму тации постоянных и переменных токов значительной величины. Такие 'важные достоинства тиристоров, как незначи тельное падение напряжения в открытом состоянии, м а лое время восстановления управляемости, малые массы и .габариты, большой коэффициент усиления по мощно сти, высокий .к. п. д., незначительные эксплуатационные затраты и высокая надежность, обеспечили им широкое применение в промышленных электроприводах. Первоначальным недостатко.м полупроводниковых преобразовательных установок являлась их высокая стоимо.сть в сравнении с преобразователями других ви дов (ионных, электромашинных и т. п.). Однако непре рывное совершенствование технологии производства при вело 'К значительному .снижению отпускных цен на полу проводниковые вентили и повышению технико-экономи ческой эффективности электроприводов с .полупроводни ковыми преобразователями. Вследствие этих причи!! непрерывно расширяется область применения тиристор ных электро1приводов, увеличивается их мощность. Схемам управляемых тиристорных электроприводов как переменного, так и постоянного тока посвящено большое число работ в отечественной и зарубежной ли тературе. Однако большая часть этих работ рассматри вает вопросы, связанные с созданием, проектированием и исследованием полупроводниковых электроприводов постоянного и переменного тока с непрерывным регули рованием потока энергии, поступающей в .двигатель. 3
- 4. Это прежде всего Щ'риводы с фазовым и частотным управ лением. Значительно меньшее (внимание, как это отмечалось на IV Всесоюзной конференции но автоматизированному электроприводу [Л. 1], уделяется применению тиристо1ров как бесконтактных (коммутационных аппаратов для управления асинхронными двигателя.ми. Систематичес кого описания и анализа асинхронных электроприводов с импульсным управлением в отечественной и зарубеж ной литературе практически нет. Настоящая книга пре следует цель частично ликвидировать имеющийся пробел, систематизировав и обобщив накопленный опыт по им пульсному регулированию асинхронных двигателей с (кон тактными кольца.ми. В этих электроприводах тиристоры используются как быстродействующие бесконтактные коммутационные аппараты с высокими энергетическими и технико-экономическими показателями. Такое приме нение тиристоров позволяет создавать электроприводы переменного тока, отличающиеся конструктивной про стотой, относительно малой стоимостью и хорошдми ди намическими свойствами. В настоящей книге не рассмат риваются физичеокие свойства, принцип действия и основные технические данные полупроводниковых вен тилей [Л. 17, 22, 29]. Основное .внимание здесь уделено принципам построеиия и анализа схем асинхронных им пульсных электро1Приводов с управляемыми тиристорны ми коммутаторами, а также исследованию их характери стик. Авторы
- 5. Г л а в а п е р в а я О Б Щ И Е В О П Р О С Ы 1-1. ЭТАПЫ РАЗВИТИЯ ИМПУЛЬСНОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ Значительная часть общепромышленных и специальных меха-- низмов должна работать с регулируемыми скоростями рабочих органов. При этом наиболее прогрессивным способом регулирования технологического процесса является регулирование скорости враще ния электрического двигателя. Асинхронные двигатели отличаются простотой конструкции, малой стоимостью, высокими к. п. д. и надежностью. Их достоин ством является и тот факт, что они по срав1нению с двигателями постоянного тока при равных мощности и скорости вращения имеют меньший запас кинетической энергии, а следовательно, обладают высокими динамическими качествами. Однако .в отношении регули ровочных свойств асинхронные дв.игатели уступают двигателям по стоянного тока, что ограничивает область их применения. Тем не менее во многих случаях задача регулирования скорости вращения рабочего механизма может быть решена и при дрименении асин хронных двигателей, особенно асинхронных двигателей с фазным ротором. Скорость вращения асинхронного двигателя бОЬ Отсюда следует, что регулировать скорость асинхронного дви гателя можно следующими путями: изменяя величину скорости вращения магнитного поля Hi, которая зависит от частоты fi, или числа пар полюсов р; изменяя величину скольжения s. Величину скольжения двигателя можно регулировать путем из менения величины напряжения на зажимах статора, создания асим метрии напряжения на зажимах статора, включения регулируемых сопротивлений в цепь обмоток ротора; введения в цепь ротора внешнего напряжения (каскадные схемы); импульсного регулиро вания сопротивлений и,ти напряжения. В основе импульсного способа регулирования спорости враще ния лежит принцип дискретного изменения параметров двигателя или источника питания, что приводит к периодическому изменению вращающего момента от значения, превышающего момент сопро тивления, до значения, меньшего момента сопротивления. Среднее значение момента вращения в статическом режиме равно статиче 5
- 6. скому моменту сопротивления. Таким образом, рабочий Процесс в приводе с импульсным регулированием представляет собой ряд следующих одно за другим изменений параметров системы. Режим, соответствующий статическому в систе.ме с непрерьшным регулиро ванием, в системе с импульсным регулированием является квази- статическим. Регулируя отношение времени измененного состояния параметров схемы tu ко всему времени периода изменения Т, т. е. изменяя скважность y = tn lT импульсов питающего напряжения или скваж1Н0сть измепепия величин параметров двигателя, можно регу лировать его скорость вращения. Регулирование скважности может осуществляться или посредст вом регулирования длительности измененного состояния параметров привода при постоянном периоде коммутации (/и=уаг; 7’=const), или посредством регулирования периода коммутации при постоян ной длительности измененного состояния параметров привода (/„ = = const; 7'=var). Таким образом, можно управлять приводом как при постоянной, так и при переменной частоте коммутации. Им пульсное регулирование скорости вращения в электроприводах с фазными асинхронными элект1)одвпгателями применимо как в си стемах с потерей энергии скольжения, так и в системах с исполь зованием энергии скольжения. Проследим основные этапы развития электроприводов с импульс ным регулированием скорости вращения электродвигателей; при этом, учитывая содержание настоящей работы, основное внимание уделим электроприводам переменного тока с асинхройшыми элек тродвигателями. Первые работы, посвященные псследованию квазпстатических процессов в электроприводах с импульсным управлением, были опубликованы К. Блауфусом и В. С. Кулебакиным в 30-х годах. В этих работах рассматрнвалпсь системы импульсного регулирова ния скорости вращения двигателей постоянного тока при помощи регуляторов, действующих на основе контактной электромеханиче ской аппаратуры. В дальнейшем М. И. Крайцбергом была предло жена дроссельная схема импульсного управления скорости иращепия асинхронных двигателей, что расширило диапазон мощностей элек троприводов с импульсным управлением. Первой работой, в которой рассмотрены импульсные схемы управления асинхронными коротко замкнутыми двигателями, была, работа, выполненная Э. П. Сар кисян в .1952 г. В более поздних работах II. П. Кречетовича, Л. Л. Роткопа, Ю. П. Агафонова, Е. П. Красовского и А. Г. Шаповаленко были продолжены начатые исследования и предложено несколько кон тактных и дроссельных схем импульсного регулирования скорости вращения как короткозамкнутых, так и фазных асин.хронпых дви гателей. Выполненные исследования показали, что при импульсном регулировании скважности питающего напряжения статора работа двигателя сопровождается возникповепием тормозных .моментов, значительными пиками тока и перегревом двигателя. .Возникновение больших токов и тормозных моментов объясняется периодическими включениями двигателя при иамагпичеппой стали статора. Извест но, что магнитный поток после отключения двигателя угасает не сразу, а поддерживается за счет действия ротора. Возможность применения импульсных систем для регулирования скорости вращения короткозамкнутых асинхронных двигателей огра ничена большими потерями, выделяющимися непосредственно в дви-
- 7. гателе. Применение двигателей с контактными кольцами позволяет вынести значительную часть потерь из двигателя, а значит, и более полно его использо<вать, Широкое иримоиеиие импульсного способа регулирования ско рости вращения асинхронных двигателей долгое время тормозилось отсутствием высококачественных прерывателей. Недостатками кон тактных электромеханических (прерывателей являются быстрый износ контактов и значительная инерционность. По этим причинам они не могут обеспечить надежной работы при большой частоте включений. Дроссели насыщения, применяемые в качестве аппара тов коммутации, также имеют ряд крупных недостатков: инерцион ность, большие габариты и массу, сравнительно малый к. и. д. Развитие 'полупроводниковой техники и появление в 60-х годах тиристоров явились основой для новых возможностей дальнейшего совершенствования импульсных методов регулирования асинхро1Н1Ых электроприводов._Тиристоры обладают рядом важных технико-эко номических свойств: малыми массой и габаритами, высокими энер гетическими показателями, быстродействием и большим коэффици ентом усиления но мощности; широким (штервалом рабочих темпе ратур; постоянной готовностью к работе и надежностью. Эти важ ные преимущества тиристоров позволяют создавать импульсные асинхронные приводы с .высокими эксплуатационными показателя ми и позволяют осуществлять плавное регулирование скорости в диапазоне до 150:1 и более, а ' также надежно контролировать пуско-тормозные режимы. Область применения тиристорных импульсных систем в силовом электроприводе с .каждым годом неуклонно расширяется; находят применение системы импульсного регулирования асинхронных дви гателей на транспорте, в станкостроении, для привода механиз мов подъема грейферных кранов и других машин. 'Начиная с 1961 г., .вопросам применения тиристорных преобра зователей в силовом электроприводе уделяется значительное вни мание в отечественной и зарубежной научно-технической литера туре. Успехи радиоэлектроники и широкое распространение *во мно гих областях техники методов импульсного управления и регулиро вания сопровождались созданием единой методики исследования и расчета дискретных систем. Наиболее полными и законченными работами в этой области являются работы проф. Я. 3. Цыпкина, основанные на использовании дискретного преобразования Лапласа. Пользуясь этим методом, можно, значительно упростив ход теоре тического исследования, более глубоко и всесторонне изучать про цессы в импульсных системах. При этом следует подчеркнуть, что предложенная методика исследования формально подобна методике исследования систем непрерывного регулирования. 1-2. КЛАССИФИКАЦИЯ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ С ИМПУЛЬСНЫМ УПРАВЛЕНИЕМ К настоящ ему времени разработано и испытано значительное количество схем тиристорных асинхронных электроприводов с им пульсным управлением. Эти схемы мож но классифицировать по ряду нриЗ)наков. В зависимости от способа включения управляемых тиристорных коммутаторов сущ ествую т две основные группы асин 7
- 8. хронных импульсных электроприводов: с управляемыми коммутато рами в цепи статора и ротора асинхронного электродвигателя. Другими классификационными признаками являются наличие промежуточной цепи постоянного тока, использование энергии скольжения, регулирование скорости вращения в различных режи мах работы, характер изменения магнитного поля двигателя. Клас сификационная схема, соответствующая указанным признакам и Рис. 1-1. Классификация асинхронных электроприводов с импульс ным управлением. основным схемным решениям, представлена на рис. 1-1. Эта схема учитывает только наиболее общие свойства асинхронных импульс ных электроприводов и не является исчерпывающей. Ниже рассмотрены основные схемы, соответствующие приведен ной классификации. А. Тиристорные асинхронные электроприводы с управляемыми коммутаторами в цепи статора В основе принципа действия электроприводов с управляемыми коммутаторами в цепи статора лежит принцип дискретного изме нения напряжения, приложенного к зажимам двигателя, от номи нального значения до значения, равного нулю. Так как вращающий момент двигателя пропорционален квадрату напряжения, то это приводит к изменению вращающего момента от максимального зна чения до нуля. Среднее значение момента вращения в квазиста- тическом режиме равно статическому моменту сопротивления. Ре гулируя отношение времени включенного состояния тиристорного коммутатора ко всему времени периода, т. е. изменяя скважность и.мпульсов питающего напряжения у. можно регулировать скорость 8
- 9. вращения двигателя. На рис. 1-2,а приведена схема с тиристорным коммутатором в цепи статора {Л. 15, 40, 41]. Коммутирующим устройством в схеме являются включенные встречно-параллельно тиристоры. При этом возможно создание как замкнутой, так и разомкнутой систем привода. Несмотря на внещнее сходство рас сматриваемой схемы с релейно-контакторными импульсными схема ми, качественные различия процессов, происходящих в этих приво дах, весьма существенны. Это объясняется в первую очередь явле- Рис. 1-2. Схемы импульсного управления асинхронным двигателем. а — с управляемым силовым коммутатором в цепи статора: б — с управляемым коммутатором в це пи выпрямленного тока статора; А Д — асинхрон ный двигатель: ТГ — датчик скорости (тахогене- ратор); ОС — орган сравнения; УУ — устройство управления тиристорами; t/„ , Op — соответ ственно напряжения сравнения, обратной связи по скорости и рассогласования; УТК — силовой коммутатор; Я — неуправляемый выпрямитель; Др — сглаживающий дроссель; Яд — добавочное сопротивление.
- 10. ййём естественной 'коммутации, вследствие которой тиристоры у.прйй^ ляемого коммутатора запираются не непосредственно после снятия импульсов управляющего напряжения, а лишь при переходе анод ного тока через нулевое значение. Максимально возможное запазды вание запирания тиристора равно половине периода питающего напряжения независимо от величины ко.ммутируемой мощности. В результате этого дв’игатель может за один период коммутации работать в трехфазном и двухфазном двигательных режимах, а так же в режиме лииамического торможения. Д л я надеж ного открывания тиристоров устройство управления долж н о выдавать сигналы управления такой величины и длитель ности, чтобы обеспечить надеж ное включение тиристоров во всем диапазоне нагрузок и скоростей. Это требование объясняется тем, что асинхронный двигатель представляет собой активио-.индуктивную нагрузку, у которой фазовый сдвиг тока и напряжения зависит от скольжения s. П оэтом у импульсы сигналов управления долж ны поступать на управляющ ие электроды со смещением на угол ф а зо вого сдвига или их длительность долж на быть достаточно большой для надеж ного открывания управляемых вентилей силового ком мутатора во всем диапазоне скоростей. Импульсы напряж ения управ ления долж ны быть синхронизированы с питаю щ им . напряжением и для управления двум я встречно-:параллелы1ьг.М1И тиристорами одной фазы смещены один относительно другого на 180 эл. град. В разомкнутых электроприводах подобного -.рода диапазон ре гулирования скорости невелик. Применяя замкнутые системы регули рования с обратными связями по •скоро'сти, можно получить диа пазон регулирования 120 : 1 и более. Весьма сущ ественны м недостатком электро'пр'И'водов с силовыми коммутаторами в цепи переменного тока 'статора является то, что при глубоком регулировании скорости' двигатель работает со зн а чительной тепловой перегрузкой. Кроме того, имеют место значитель ные пульсации скорости. Наряду с управлением но цепи переменного тока статора воз можно [Л. 33—i35, 41] управление по цепи выпрямленного тока ста тора (рис. 1-2,6). Здесь концы обмоток статора включены в трех- фазиый неуправляемый мост с резистором /?д, который шунтирован управляемым коммутаторо.м УТК на тиристорах Ti и Гг. Варьируя скважностью замыкания накО|ротко резистора /?д, можно изменять его среднее значение и тем самым регулировать скорость вращения двигателя. Механические характеристики асинхронного двигателя при регулировании скважности подобны механическим характеристи кам при регулировании .активного сопротивления в цепи статора при обычной схеме включения. Б. Тиристорные асинхронные электроприводы с управляемыми коммутаторами в цепи ротора Пр.именение .управления по цепи ротора позволяет вынести з.иачительную часть потерь из дв.игателя, а в ряде случаев цополь- зовать энергию скольжения. При иопользоваиии схем регулирования с промежуточной цепью постоянного тока в роторе частота комму тации не ограничивается частотой переменного тока и может быть выбрана, ис.ходя из велич'ины допустимой пульсации скорости вра щения двигателя. Именно эти достоинства схем с управлением по цепи ротора привели к их преимущественному применению. 10
- 11. Рассмотрим основные схемы электроприводов с силовыми ком мутаторами в цепи ротора и промеж уточной цепью постоянного тока. Характерной особенностью всей группы этих электроприводов яв ляется наличие трехф азпого управляемого выпрямителя, включен ного в цепь ротора асинхронного двигателя. Регулирование элек тропривода осущ ествляется посредством управления постоянным током, проте кающим по цепи выпрямителя. Так как тиристоры представляю т собой вентили и с неполной управляемостью, т. е. не могут быть заперты при помощ и управ ляющего сигнала, то для управления 0 постоянным током тиристоры применя ются совместно с узлом искусственной коммутации. И скусственная коммутация обычно реализуется при помощи специ альных коммутирующ их конденсаторов, которые запасаю т энергию, н еобходи мую для прерывания тока через силовой тиристор. Рассмотрим принцип действия одно го из преоГхразователей, применяемых в электроприводе. Схема преобразовате ля представлена на рис. 1-3,а. В началь ный момент времени тиристоры Ti Т2 закрыты, а конденсатор Ск не заря жен. При пуске преобразователя }ie- обходимо, чтобы первоначально от устройства управления был подан поло жительный отпирающий импульс на управляющий электрод вспомогательно го тиристора T-i. Тиристор откроется, и коммутирующий конденсатор Ск начнет заряжаться от источника питания. В конце процесса заряда конденсатор за рядится до напряжения Uc, примерно равного по величине напряжению источ ника питания и, с полярностью, соответ ствующей обозначениям в скобках. После заряда конденсатора преобразо ватель готов к работе. Работа схемы в установившемся ре жиме происходит следующим образом. Как только от устройства управления »а управляющий электрод тиристора Ti поступает отпирающий импульс, тири стор открывается, и по цепи нагрузки проходит ток. Одновременно происхо дит процесс резонансного колебательного перезаряда коммутирую щего конденсатора. Процесс перезаряда длится в течение половины периода собственных колебаний контура и блокируется диодом Д и тиристором Тг. Для запирания тиристора, включенного в цепь постоянного то на, необходимо, чтобы ток, протекающий через тиристор, стал еньше тока удержания. В рассматриваемом преобразователе для II Рис. 1-3. Нереверсивный тиристорный преобразо ватель с емкостной ком мутацией. а — схема; Ti — силовой ти ристор, через который про ходит полный ток нагрузки; '/’г — вспомогательный тири стор, служащий для управ ления ■ процессом коммута ции тока через силовой ти ристор; Д — диод в цепи контура коммутации, служ а щий для прерывания коле бательного разряда конден сатора; — индуктивность в колебательном контуре; — коммутирующий кон денсатор; б — диаграммы напряжений.
- 12. этой цели используется энергия разряда конденсатора, так как заряженный конденсатор является источником отрицательного запи рающего напряжения с очень незначительным внутренним сопротив лением, что обеспечивает возможность 'прохождения через конденса тор достаточно большого обратного тока. Ток через тири'стор Ti будет проходить до тех нор, пока от управляющего устройства не поступит на управляющий электрод тиристора Tz отпирающий Др УТК Ц положительный импульс и тиристор Тг откроется. В результате ток, проходя щий через тиристор Ти практически мгновенно ста нет равным току нагрузки, а ток, проходящий через тиристор 7i, станет рав ным нулю. Одновременно в результате начавшегося п'роцесса разряда комму тирующего конденсатора С,,-, к тиристору Т будет при ложено отрицательное запи рающее напряжение, кото рое ускоряет восстановле ние запирающей способ ности. Если продолжитель ность разряда конденсатора достаточно велика, то тиристор Т Рис. 1-4. Схема управления асин хронным двигателем с силовым ком мутатором в цепи выпрямленного тока ротора. восстановит запирающую способность и ток через нагрузку пре рвется. Затем конденсатор С« перезарядится через открытый тири стор Тг- Далее процессы будут повторяться. В асинхронных импульсных электроприводах тиристорный пре образователь применяется в качестве быстродействующего бескон тактного полупроводникового ключа. Схема асинхронного импульс ного электропривода с промежуточной цепью постоянного тока является наиболее распространенной. Значительная часть выпол ненных электроприводов имеют именно такую схему или содержат ее в качестве составного элемента схемы привода (Л. 7, 13, 14, 30, 33—43, 45, 46]. Поэтому в данной работе этой схеме будет уделено основное внимание. Рассмотрим в качестве пр'имера схему на рис. 1-4. В цепь ро тора двигателя включен добавочный резистор R^. питаемый выпрям ленным током от трехфазного неуправляемого мостового выпрями теля В. Пар'аллельно добавочному резистору включен тиристорный преобразователь постоянного иаиряжения, используемый в качестве быстродействующего ключа. Для сглаживания пульсаций выпрям ленного тока в цепь выпрямителя включен дроссель Др. Таким об разом, в рассматриваемой с.хеме функции преобразователя тока я управления двигателем разделены. Выпрямитель В преобразует переменный ток ротора в постоянный, а управление выпрямленным током осуществляется тиристорным ключом УТК. Величина сопро тивления цепи ротора зависит ■от состояния ключа; ключ замкнут— цепь ротора замкнута накоротко, минуя добавочный резистор; ключ разомкнут — цепь ротора замкнута через добавочный резистор. При работе управляемого тиристорного коммутатора (УТК) в импульс ном режиме (рис. 1-5,а) среднее значение сопротивления в цепи вы 12
- 13. i" d i. т i t Т прямленного тока ротора можно регулировать в диапазо'не ^Rjs.. По цепи выпрямителя будет проходить непрерывный пуль сирующий ток. Среднее значение выпрямленного тока Id определяет ся из равенства тГ г 1 С 1 /д = - у i' dt ~f~ 6 ^т где Т — период коммутации управляемого коммутатора; y = tn fT — относительное время замыкания накоротко добавочного резистора (скважность); tn — длительность времени включенного состояния ти ристора Тй V — мгновенное значение выпрямленного тока ротора в интервале времени Г'— мгновенное значение выпрям ленного тока ротора в интервале времени /и^ ^ ^ 7 . Изменяя скважность у от нуля до единицы, можно регулиро вать среднее значение выпрямленного тока ротора от некоторого максимального до некоторого ми нимального значения. При этом изменяются среднее значение мо мента двигателя и его скорость вращения. Частота коммутации устанавливается в зависимости от допустимой пульсации скорости вращения, потерь в тиристорах коммутатора и величины электро магнитной постоянной времени це пи ротора. Значение величины ча стоты коммутации обычно лежит в диапазоне 50— 1 ООО гц. При та ком широком диапазоне изменения частоты коммутации появляется возможность максимально ограни чить амплитуду пульсаций скоро сти вращения и довести ее до зна чения, равного обычному уровню неравномерности, определяемому эксцентриситетом ротора и зубцо выми пульсациями. Область регу лирования скорости вращения в приводе определяется граничными механическими характеристиками, соответствующими скважностям Y=0 и у=1 (рис. 1-5,6). Область регулирования скорости вращения может быть расширена посредст вом введения в цепь ротора дви гателя большого добавочного сопротивления. При этом следует учитывать, что величина добавочного сопротивления ограничена допустимыми напряжениями на тиристорах управляемого комму татора, так как должно выполняться требование /г!макс/?Д<^/т.поп, где 7rf — среднее значение выпрямленного тока, а; Rn — добавочное сопротивление, ом f/т.доп — допустимая величина напряжения, при ложенного к крайним р—л-переходам тиристора. Для удовлетворения этого требования можно секционировать Добавочный резистор (рис. 1-6). В этом случае сочетается ступенча 13 Рис. 1-5. К принципу управле- }шя асинхронным импульсным электроприводом с промежу точной цепью постоянного тока. а — диаграмма выпрямленного тока ротора в квазистатическом режиме; б — область регулирования скоро сти вращения.
- 14. тое переключение секций добавочного резистора с бесступенчатым регулированием величины среднего значения со1протнвлеиия между ступенями. Как видно из ириведепных схем, ступенчатое регулиро вание может осуществляться как с помощью контакторной аппа ратуры '(рис. 1-6,а), так и с помощью бесконтактных тиристорных переключателей (рис. 1-6,6). Схемы с секционированным добавоч- ны.м резистором позволяют несколько расширить диапазон регули рования, но не решают всупрос полностью. УТК, УТК, УТК, Рис. 1-6. Схемы управления асинхронным электродвигателем при помощи силового коммутатора в цепи выпрямленного тока ротора с секционированными добавочными сопротивле ниями. а — с контакторным переключением секций добавочного сопротивления; б — с независимыми управляемыми тиристорными коммутаторами. Работу двигателя в любой точке I квадранта можно осуще ствить, включив последовательно с добавочным резистором кон денсатор С (рис. '1-7,а). В этом случае при у = 0 '(тиристор Г) за перт) выпрямленный ток ротора будет равен нулю. Следо'вательно, область регулирования скорости вращения апределяется осями ко ординат и граничной механической характеристикой при у = 1 (ти ристор T’l открыт). Для ограничения напряжений 'на тиристорах УТК емкость конденсатора должна быть до'статочно большой. В от личие от расс.мотренных ранее схем в этой схе.ме возможен режи.м прерывистых токов. Осуществить работу двигателя в любой точке I квадранта можно, применив также схему, приведенную на рис. 1-7,6. В этой схеме дополнительный неуправляемый выпрямитель Bi, питаемый от сети, включен встречно но отношению к основному выпрями телю В. В эго.м случае на добавочно.м резисторе 7?д независимо от нагрузки двигателя поддерживается постоянное напряжение. Диод Ml препятствует возможному короткому замыканию '(через тири стор T’l) выпрямителя Bi. Если тиристор Ti открыт '(у= 1), то граничная механическая характеристика близка к естественной. При полностью закрытом ти ристоре T i ( y = 0 ) h o цепи ротора двигателя ток не проходит. Суще ственным недостатком этой схемы является ее малая эконо.мичность, 14
- 15. •Гйк как в Добавочном сопротивлений шостоянно расходуется боль шая мощность IS.P^= n^dlRA, где f/d — выпрямленное напряжение сети (на выходе преобразователя Bi). При регулировании происхо дит только перераспределение этих потерь: часть энергии 'поступает из сети, а часть из цепи ротора. При любом раопределении потерь общая их величина остается постоянной. Рассмотренные с.хе.мы (в дальнейшем будем их называть схе-. мами с «импульсным» сопротивлением и промежуточной цепью по стоянного тока) в случае отсутствия обратных связей позволяют осуществлять регулирование скорости в сравнительно узком диа пазоне, так как механические характеристики в этом случае такие же, как и при реостатном регулировании в роторной цепи. Для рас- 6) Рис. 1-7. Схемы управления асинхронным электродвигателем с сило вым коммутатором в цепи ротора и регулированием в лю бой течке I квадранта. ”ногп "^'РУЗочным сопротивлением и емкостью в роторной цепи; б — импульс- регулирования скорости при работе на противо-э. д. с. в цепи ротора. 15
- 16. 0 - и 0 - ТРН 0,‘f 0,8 1,0 Ф Рис. 1-8. Схема асинхронного элек тропривода с импульсным регулиро ванием в четырех квадрантах (а) и механические характеристики при работе регулятора напряжения (б). ширения диапазона регулирования скорости вращения и формирования желательных механических характе ристик в схему должны быть введе ны обратные связи. При необходимости обеспечить регулирование привода во всех четы рех квадрантах может быть примене на схема, приведенная на рис. l-8,j. В этой схеме импульсное регулирова ние сочетается с регулированием на пряжения на зажимах статора асин хронного двигателя. Планное регули рование действующего значения на пряжения осуществляется посредст вом изменения угла отпирания вен тилей реверсивного тиристорного ре гулятора напряжения ТРИ [Л. 8, 18]. 16
- 17. П и работе «вперед» включены тиристорные пары 1, 3, 5, при ра боте «паз^ад» — тиристорные пары 2, 3, 4. В результате работы ТРИ апряжение на зажимах статора имеет несинусоидальную форму и ги^зменяется от номинального значения до значения, примерно вного нулю, при изменении угла отпирания в диапазоне О— 150°. Так как тиристоры — вентили с неполной управляемостью, а асинхронный двигатель представляет собой активно-индуктивное ^противление с переменным фазовым углом, то очевидно, что вы ходное напряжение ТРИ определяется углом регулирования а и (оТ-э фазным углом нагрузки 0 = arctg— Механические характеристи ки асинхронного двигателя при работе ТРИ приведены на рис. 1-8,6. Граничная характеристика представляет собой характери стику, соогветствующую' полностью открытым вентилям ТРИ. Оче видно, она будет отличаться от естественной на величину потерь в вентилях. Для управления тиристорным регулятором напряжения необходимо обеспечить надежное отпирание тиристоров в нужные моменты времени независимо от угла сдвига между током и напря жением двигателя. При этом должна соблюдаться симметрия углов регулирования плеч ТРН, так как асимметрия приводит к неравно мерной загрузке тиристоров, увеличению пульсаций тока и скорости двигателя, возникновению ударов. Управляя тиристорами регулято ра напряжения ТРН и силового коммутатора УТК, можно обеспечить работу двигателя в двигательном режиме в I и III квадрантах и в тормозных режимах 1(противовключение или динамическое тормо жение) во II и IV квадрантах. Обычно система управления приво дом [Л. 35, 40, 41, 46] строится таким образом, что импульсное ре гулирование при помощи УТК осуществляется только при полностью открытых вентилях тиристорного регулятора напряжения. Наличие ТРН позволяет осуществить работу привода в любой точке квад ранта. То обстоятельство, что энергия скольжения бесполезно рассеи вается в сопротивлениях цепи ротора, является важнейшим недо статком рассмотренных схем. Это снижает к. п. д. и ограничивает область применения подобных электроприводов. При этом способе регулирования потери энергии возрастают с расширением диапазо на регулирования скорости вращения. Этого недостатка лищены электроприводы, в которых энергия скольжения рекуперируется в цепь переменного или постоянного тока (Л. 13, 35, 4'1]. Их схемы показаны на рис. 1-9. Они представляют собой каскадные схемы с импульсным управлением. Простейшей является схема на рис. 1-9,0. Здесь энергия скольжения поступает в сеть постоянного тока. Например, возможно использование [Л. 34, 35] энергии сколь жения для питания цепей возбуждения синхронных генераторов в автономном приводе или аккумуляторной батареи. Регулирование скорости вращения достигается при помощи 'управляемого тири сторного коммутатора, работающего в режиме щиротпой модуля ции. Диод Hi предотвращает возможное короткое замыкание источ ника постоянного тока при открытии вентиля Ti. При постоянной на грузке на валу двигателя рекуперируемая в сеть энергия максималь на на нижнем пределе регулирования скорости и уменьшается при увеличении скорости. Дальнейшим развитием этой схемы является схема асинхрон ного вентильного каскада с импульсным регулированием. В асин хронном вентильном каскаде регулирование скорости вращения осу- 2 -3 4 8 17
- 18. тёствляётся йосрёл'ствбм 'УправлеИия y^лoм бтпйрайия йпверторй. При этом вследствие низкой частоты процессов в цепи инвертора проходят токи с большой амплитудой пульсаций. Для ее уменьшения в цепь выпрямленного тока ротора необходимо включать реактор с большой индуктивностью, что приводит к увеличению массы и Рис. 1-9. Каскадные схемы с импульсным регулированием с рекуперацией энергии в сеть постоянного тока (а) и в сеть переменного тока (б) (асинхронный вентильный каскад с импульсным регулированием). габаритов электрооборудования привода'. При работе инвертор noi требляет значительную реактивную мощность и привод имеет низкий коэффициент мощности. Применение асинхронного вентильного кас када с импульсным регулированием (рис. 1-9,6) позволяет устранить эти недостатки. В этой схеме функции выпрямления э. д. с. ротора; 18
- 19. управления вытрямленпым током и инвертирование энергии сколь жения разделены между отдельными элементами. Схема позволяет обеспечить работу привода при скоростях ниже синхронной. Выпря митель 1В, собранный на неуправляемых вентилях, преобразует э Д- с- ротора, имеющую частоту скольжения, в постоянное на пряжение; управляемый тиристорный коммутатор УТК управляет постоянным” током в цепи ротора и позволяет обеспечить работу инвертора 2В с минимальным углом опережения, что соответствует малой реактивной мощности. Для еще большего снижения реактив- Рис. i-10. Схемы импульсных асинхронных электроприводов с управляемыми коммутаторами в цепи переменного тока ро тора. и — с неполностью управляемым мостовым выпрямителем, работающим в импульсном режиме; б — с трехвентильным коммутатором. на tiOH мощности инвертора необходимо синхронизировать момент запи рания УТК с переключением фаз инвертора таким образом, чтобы ток в цепи инвертора, соответствующий моменту переключения, был В этом случае можно даже обеспечить опережающий коэффициент мощности. Так как в этой схеме функцию регулирования скорости выпол няет коммутатор УТК, то возможно применение одного инвертора несколько регулируемых приводов. Возможность работы УТК высокой частотой коммутации позволяет получить меньшие габа- Р ты сглаживающего дросселя при тех же допустимых пульсациях il/ ротора. рассмотренных выше приводов с коммутаторами в про- &лек*^°^^”°^ цепи постоянного тока, возможны также импульсные J 6^3 промежуточных цепей постоянного тока (71. 2, В схеме на рис. 1-10,а в качестве коммутатора использован юностью управляемый мостовой трехфазный выпрямитель В, 19
- 20. работающий в импульсном режиме. Сонротивленне /?д2 < ^ д 1. Прр открытых вентилях выпрямительного моста механическая хара.кте. ристика определяется сопротивлением Rjiz цепи ностояниого тока При закрытых управляемых вентилях механическая характеристика определяется сопротивлениями Rjn, включенными в цепь перемен ного тока ротора. Изменяя скважность включения мостового вы. прямителя, можно регулировать скорость. Область возможного ре гулирования скорости расположена между граничными характери стнками. Схема на рис. 1-10,6 отличается от предыдущей тем, чтс в ней применены только три вентиля. .Схемы с коммутаторами в цепях переменного тока имеют не сколько большую амплитуду пульсаций скорости вращения, что объ ясняется малыми частотами работающего коммутатора. 1-3. ПЕРСПЕКТИВЫ ПРИМЕНЕНИЯ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ С ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ СКОРОСТИ ВРАЩЕНИЯ Системы импульсного регулирования асинхроцных двигателе! находятся в стадии интенсивного развития и исследования. Свой ства этих систем полностью еще не раскрыты. Однако можно ука зать ряд приводов, где импульсное регулирование асинхронных дви гателей или применяется, или имеет реальные перспективы примене ния в ближайшее время. Важной областью применения таких систем является приво. грузоподъемных машин (кранов, подъемных лебедок и др.). П диапазону регулирования импульсная система привода вполне удов летворяет требованиям большинства грузоподъемных машин. Не сколько сложнее обстоит здесь дело с тормозными режимами npi опускании грузов. 'В этом случае используется либо динамическо торможение, либо режим противовключения. В первом случае регу лирование скорости вращения может быть достигнуто двумя спо собами; путем импульсного регулирования сопротивления в neit ротора и путем импульсного включения постоянного тока в статор ную цепь. При об.тнх способах регулирование осуществляется с иомощы тиристорного широтно-импульсного прерывателя. Возможно такж комбинированное использование обоих способов. При этом можи получить семейство жестких характеристик, обеспечивающих не обходимые посадочные скорости при монтажных и других рабг тах. Импульсное регулирование в режиме торможения противоаклк ченнем используется в приводах судовых подъемных лебедок [Л. 4( и подъемной лебедки экскаватора-крана [Л. 6]. Динамическое гор .можеиие с импульсным прерывателем имеет преимущества по сравне нию с этим способом в отношении потерь энергии. Другой областью применения импульсного регулирования являет ся привоа вентиляторов. Благоприятные перспективы имеет таки^ импульсное регулирование для привода конвейеров различного нг значения. В этих машинах обычно требуется незначительное изме пение скорости. Так, например, в двух- и трехдвигательном приво; необ.ходимо снижение скорости в отдельных двигателях на 2—3 20
- 21. Г л а в а в т о р а я К В АЗ ИСТ АТ ИЧЕСКИЕ Р Е Ж И М Ы РАБОТЫ Т И Р И С Т О Р Н Ы Х А С И Н Х Р О Н Н Ы Х Э Л Е К Т Р О П Р И В О Д О В С И М П У Л Ь С Н Ы М У П Р А В Л Е Н И Е М 2-1. ПРИНЯТЫЕ ДОПУЩЕНИЯ В статике рабочий .процесс асинхронного электро привода с импульсным управлением .представляет собой шоследовательность двух нериоди'чески следующих одно за другим состояний системы. Следовательно, .можно го ворить о квааистатичеоком режиме работы. Анализ ква- зистатического режима работы привода позволяет выявить основные закономерности изменений токов в дви гателе, получить выражения для механических характе ристик и исследовать энергетические показатели при вода. Электроприводы переменного тока с асинхронными двигателями, управляемые при помощи импульсных ти ристорных коммутаторов, представляют собой сущест венно нелинейные системы. В этих системах асинхронные двигатели, неуправляемые выпрямители, управляемые тиристорные коммутаторы и тиристорные инверторы представляют собой элементы с нелинейными статичес кими характеристиками. Так, например, кривая намагни чивания асинхронного двигателя нелинейна и неодно значна; параметры двигателя нелинейно зависят от топов, скорости вращения и температуры. Аналогичные нели нейности содержат и остальные элементы схемы. Эти не линейные элементы, имеющие разнообразные и сложные характеристики, вносят значительные трудности в анализ и синтез импульсных асинхронных электроприводов. ^Учет всех этих факторов привел бы к системе нели нейных дифференциальных уравнений, которые весьма неудобны для анализа. Их 'решение возможно прежде всего методом математического моделирования на ана логовых вычислительных машинах (АВМ), цифровых вычислительных машинах (ЦВМ) и графическими мето дами. Однако для выяснения характера процессов и це- ^еи инженерной практики желательно иметь приближен- гл^^ ®^Щне решения. Поэтому будем учитывать лишь ^ авньте факторы и исключим из рассмотрения 'второсте- Иные. С этой целью введем следующие допущения: 21
- 22. 1. Реальный асинхронный двигатель заменяем идеали- зи'рованной машиной, у .которой .магнитная це.пь не насы щена; явления гистерезиса и .потери в стали не упитыва ются; отсутствуют высшие гармодические и. с.; индуктив ные со.противления рассеяния не зависят от положения ротора; токи 'В обмотках изменяются .по гармоническому закону; воздушный зазор равномерен. 2. Управляемые 'И неуправляемые вентили обладают идеализированиы.ми вольт-ам.перными характеристиками. 3. Пульсации тока с частотой .скольжения и колеба ния скорости отсутствуют. 4. Управляемый тиристорный коммутатор представ-’ ляет собой ключ с идеализироваинымн характернсти-; ками. 5. Угол перекрытия вентилей неуправляемого моста не превышает 60°. Принятые .допущения .позволяют, исключив второ степенные явления, получить достаточно точные и вполне приемлемые но сложности для инженерных .расчетов ана литические выражения для токов и скоростной и меха- .нической характеристик привода. Рассмотрим две основные схемы асинхронных элект роприводов с импульсным управлением но цени ротора: схему с «импульсным» сопротивлеиие.м в цепи выпрям ленного тока ротора (см. рис. 1-4) и схему асинхронного] вентильного каскада с имнульсны.м управлением (см; рис. 1,9-6). 2-2. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С УПРАВЛЯЕМЫМ КОММУТАТОРОМ В ЦЕПИ ПОСТОЯННОГО ТОКА При включении в ротор асинхронного двигателя] (рис. 2-1,а) неуправляемого .мостового выпрямителя] в любой момент времени, за исключением периода ком мутации, ток проходит по дв|у,м фазам ротора. Форма кривой то1ка ротора зависит от В!еличин индуктивностей в цени вентилей выпря.мителя. Уже при (3h-5)Lo, где La — инду.кгивность обмоток асинхронного .двигателя, кривая тока ротора но форме (Л. 17] приближается к .кривой, соответствующей Едр = с». При работе управля емого тиристорного коммутатора ,по цепи выпрямленного тока проходит постоянпыйпульсирующий ток (рис. 2-1,6 ) В случае полностью открытого у.правляемого 1Ком.мутатО' 22
- 23. После Завершения переходного процесса ток Достигй^ ет значения / 3; в случае закрытого коммутатора ток уменьшается до значения / 4. Таким образом, в рассмат риваемой схбхме (режим прерывистых токов невозможен. Схема замещения, приведенная к цепи выпрямлен ного тока и соответствующая принятым допущениям, по казана на рис. 2-1, в. (В этой схеме асинхронный двига тель заменен, как это обычно принято в теории каскад- 1^9 Рис. 2-1. Управление по цепи выпрямленного тока ротора, а — схема силовой цепи; б — идеализированная диаграмма выпрямленного тока; в — схема замещения асинхронного электропривода с импульсным управлением по цепи ротора. ных схем [Л. 4, 24—^27], эквивалентным генератором с па раметрами Еэ, и Lg. На схеме замещения приняты следующие обозначения: — э. д. с. эквивалентного генератора: E s = E d o s . (2-1) Здесь Edo — среднее значение напряжения на выходе выпрямительного моста при разом.кнутой цепи .постоян ного тока и скольжении s = l: £d, = r 2 £ p ..-?-sin "т (2-2) где т — число фаз выпрямителя; при т = б имеем Еао= ^1,35 £рн, где fp.H — э. д. с. на кольцах неподвижного ротора. > Л(У=4Д1(7о«4в — суммарное падение напряжения на скользящем контакте и вентилях выпрямительного моста. 23
- 24. Ra — активное сопротивление эквивалентного генера тора: /?з = 1,75/?„+’-^ Х д,5, (2-3) где Адв5 — сопротивление, учитывающее снижение] выпрямленного напряжения вследствие явления перекры- тия вентилей; Адв и /?дв---соответственно (Приведенные к цепи ротора индуктивное и активное со;противлени5^ фазы асинхронного двигателя при скольжении s = l ; при! соединении обмоток статора п ротора асинхронного дви гателя в звезду Хд. = ^ 4 ^ ; (2-4, = (2-5) где ке— коэффициент трансформации: * , « = . 0 , 9 5 - ^ ; (2-6) ^р.н A'l и Ri — соответственно индуктивное и активное сопро) тивления фазы обмотки статора; Х и — соотве-^ ственно приведенные индуктивное и активное сопротив) ления фазы обмотки ротора; Ui — линейное напряжение на зажимах статора 'дв1игателя. La — индуктивность генератора, эквивалентного асин; хронному двигателю: (2-7) где fi — частота питающего напряжения; Адр и 7?др соответственно индуктивность и сопротивление сглажива; ющего дросселя; ^д — добавочное сопротивление. Проанализируем процессы, происходящие в двигатеЛ? на протяжении одного периода коммутации. В схеме за мещения управляемый тиристорный коммутатор заменен ключом К с идеальными характеристиками. При замыка' НИИ 'ключа э. 'Д. с. эквивалентного генератора включенз на электрическую цепь с закороченным добавочным сО’ противлением Rji, и ток в цепи 'возрастает; при размыка нии ключа в цепь вводится добавочное сопротивление^ н ток в цепи уменьшается. В соответствии со схемой* 24
- 25. замещения на рис. 2- 1,в уравнения равновесия э. д. с. для рассматриваемой цепи могут быть записаны следующим образом (если за начало отсчета принят момент замыка ния ключа): для интервала времени L - ^ + R , i = E^„s~AU-, (2-8) ДЛЯ интервала времени L - § - + ( R , + R^)i = E „ , s - W . (2.9) Здесь L = L3+ Lflp — суммарная индуктивность цепи; Ri = Ro+Rjs.p — суммарное сопротивление в первом интер вале времени; R2 = Ri + Rp, — суммарное сопротивление во втором интервале времени; i — мгновенное значение тока, проходящего по цепи выпрямителя; /„ и Т — соот ветственно длительность замкнутого состояния ключа К и период комм'утации. При анализе полагаем, что система имеет постоянную частоту коммутации. Для удобства анализа процессов выразим время в относительных единицах т = 4 (2-10) К введем обозначения: Ti = LIRi и r 2= L//?2 — соответ- <^венно электромагнитные постоянные времени в первом и втором интервалах периода коммутации; ^i = T/Ti и ^2= Т /Т 2 — соответственно периоды коммутации в пер вом и втором интервалах времени в относительных еди- ницах; /3 и Д — соответственно максимальное ( у = 1) и ^«инимальное ( у = 0) значения тока в цепи: = , • (2-11) / (2-12) /?2 ’ — относительное время замкнутого с о с т о я н и я К (скважность).
- 26. с учетом введенных обозначений уравнения (2-8) ц (2-9) могут быть представлены в следующем виде: = (2-13) ' = (2-14) р2 dx Решив полученную систему относительно тока, получим; »= / , ( 1 - й - » ' ’) + г,(0)е-*''’. = /,(^); 0 < x < y ; (2-15) i = / , i i - « ' ' ' ’ ''“ ” l +h (0)«-"-'’- " = = / ,( • ' ) ; (2-16) где fi(0) и /г(0) — соответственно начальные значения тока в первом и втором интервалах периода коммутации. Учитывая, что в анализируемой схеме ток вцепи вы] прямителя всегда непрерывен (сопротивление цепиопр деляется допустимыми перенапряжеииями и всегда ко нечно), начальные значения токов в схеме могут быть определены из следующих условий: 1^(0) = /2(01 (2-17) k ( 0 ) = f,(Y). Рещив полученную систему с учетом равенств (2-15) и (2-16), получим; (U) — /мин — V ’ (2-18) • ! - /. (I ) 4- /. II — /м ак с— _ g~'9 (2-19) где ф = Р 1у-1-р 2('1—y). Амплитуда пульсаций тока в цепи выпрямителя опре: деляется формулой А'/ = 7макс—7мин Подставив сюда значения экстремальных токов (2-18) н (2-19), получим:
- 27. решив равенства (2-15), (2-16), (2-18), (2-16) и (2-20) совместно, получим: (2-21) Величину среднего знач ения вы прямленного тока м о жно определ ить по ф о р м у л е /d = ,(т:) j Д (х) cfx. о т Подставив сюда значения мгновенного тока, проходяще го по цепи выпрямителя, получим: /d = /,Y + / . ( l - T ) + A / ^ (2-22) /4 Принимая во внимание, что - ^ . = 4 !-, можем написать: ‘ 3 Рг / d = ; т + Р ( 1 - т ) + ( 1 - р ) 4 ^ ^ ^ . ] / „ (2-23) где ^ (1 _ ^ - Р . 7 ) Коэффициент пульсаций постоянного тока h - ^маке^ /з(1-^-Р .Т )+ /^^-М [1_^-Р .(1-7) ^мин / 3(1 (> -7 )j (2-24) Электромагнитный .момент, развиваемый асинхрон ным электродвигателем в схеме с «импульсным» сопро тивлением М = 'Пренебречь в первом приближении высшими РМониками тока ротора и пульсациями постоянного 27
- 28. тока, то электромагнитная мощность асинхронного дви гателя с выпрямителем в цепи ротора с точностью до 5% определяется равенством [Л. 27] Следовательно, электромагнитный момент двигателя М = --------------- L ^ . (2-25) Соотношения для среднего значения тока и электро магнитного момента двигателя позволяют построить как скоростные, так и механические характеристики рассмат-i риваемой системы электропривода. Полученные выражения для токов громоздки и неудобны для практического применения. При малых зна чениях Pi и Рг (Pi<0,3; Р2< 0,3) можно получить достач точно точные и простые выражения для токов, если разч ложить показательные функции в ряд Маклорена и огра ничиться первыми двумя членами ряда. Тогда получим: д / ([ __ / (2-26) пли - ^ = P , Y ( l - r ) . (2 -2 ^ I' где Рз = 7’/7'з; 7’з= Т//?д. { Уравнение для среднего значения выпрямленного токз после подстановки значений Pi, Рг и Рз можно привести к виду Анализируя это равенство, можно сделать вывод, чт| импульсное 'регулирование среднего значения тока экв!^ валентно введению в цепь добавочного сопротивления 7?д ( 1—у), а величина полного сопротивления Rp зависй) 28
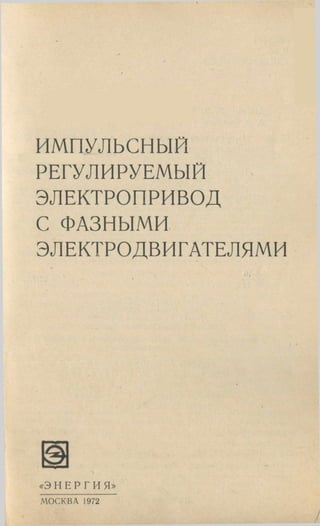
- 29. от скважности у. Используя (2-3) и (2-30), получаем приближенное уравнение скоростной характеристики рассматриваемого электропривода . [^3 + / ? « ( l - Y ) ] / d + Af7 (2-31) £do — ЗЛГд,/^/;^ где /?з=1у75 /?дв + /?д.р. Приняв среднее значение выпрямленного тока цепи ротора двигателя равным нулю, определим величину скольжения идеального холостого хода асинхронного при вода с «импульсным» сопротивлением: HdO откуда скорость холостого хода = (2-32) где tii — скорость вращения .магнитного поля (синхронная скорость), В случае применения полупроводниковых вентилей величиной л и можно пренебречь и считать, что По~Пи Выражение (2-31) .можно привести к виду « = /г. 1- + . (2-34) -do— „ и Попользовав равенства (2-25) и (2-34), можно по- <^роить механические хара.ктеристики электропривода. Достаточно простое выражение для механической харак теристики можно получить, если пренебречь падением н а пряжения вследствие явления перекрытия вентилей. Ре шив равенства (2-25) и (2-30) совместно, получим (с уче- Т0.Мпринятого допущения): Л4 '— ^do^d 9,55£до Edo^ ^2 35) Им доказаны механические характеристики 11^ 7*^1»сной системы электропривода с двигателем МТ ^ '6, добавоч.ным сопротивлением /?д=16 ом и реакто- с параметрами 1 др= 3,8- 10“ ®гн и /?др= 0,08 ом. I 29
- 30. Сплошными линиями показаны 'расчетные Механ'й- ческие характериетики, пунктирным'И — эксперименталь ные. Из рисунка видно, что механические характеристики] рассматриваемой системы привода 'подобны механическим] характеристикам при изме- Рис. 2-2. Механические харах- ’ теристикн асинхронного элек тродвигателя с импульсным управлением по цепи выпрям ленного тока ротора. нении активного сопротивле ния в цепи ротора асин хронного двигателя. Ж ест кость характеристик умень шается при уменьшении скважности. При скважно сти y = 0,05 и y = 0,95 искус ственные механические ха рактеристики совпадают с соответствующими гранич ными. На рис. 2-3 приведены ха рактеристики, иллюстрирую;- щие зависимость амплитуды пульсаций тока ротора от параметров привода. Как видно из рис. 2-3, амплитуд да пульсаций постоянного тока в цепи ротора умень: шается при уменьшении периода коммутации, увеличе] НИИ А др сглаживающего реактора и p = pi/p2— В соответств'ии с принятыми 'допущениями полученные результаты .могут быть распространены на приводы 4 коммутаторами переменного тока в цепи 'ротора (с.м^ рис. 1-10). В этом случае при расчете скоростных ха,- й1гя/Id / ' я 9,6 ^ / У ^ман у V а ) б) Рис. 2-3. Зависимости, характеризующие цульсации вы прямленного тока ротора. и — расчетная; б — экспериментальная при — ампли туда пульсаций тока; / — частота коммутации. 30
- 31. рактери'стик добавочные сопрогивления в цепи (Перемен ного тока ^д.пер заменяют эквивалентным им добавочным сопротивлением /?д.п в цепи выпрямленного тока. В соот ветствии с равенством (2-3) ^?д.п=1,75 7?д.пер. 2-3. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ КАСКАДНЫХ СХЕМ С ИМПУЛЬСНЫМ УПРАВЛЕНИЕМ Применение каскадных схем с импульсным управле нием (см. рис. 1-9,6) позволяет [Л. 13, 20, 41] повысить коэффициент мощности привода, расширить диапазон регулирования, снизить массу и габариты сглаживающе го реактора. Особенно целесообразно применение импуль сного управления в случае наличия неоколыких регули руемых двигателей. При этом возможно [Л. 41] (примене ние одного общего инвертора, таи как регулирование Ь ^3 ’'Йр ‘‘Ip Рис. 2-4. Схемы асинхронного каскада с импульсным управлением скоростью вращения. “ вринцппиа.аьная; б — замещения; в — диаграмма тока в цепи ротора. скорости двигателя осуществляется при помощи управ- емого тиристорного коммутатора в депи вынря.млен- »«го тока poTotpa. кваз°^^^”^^ допущения, принятые ранее, рассмотрим Так ^ ^ ^ ^ ^ ‘^^ский режим работы исследуемого .привода. Дей ^нвертор П (рис. 2-4,а) служит только для це- энергии, то в схеме замещения .пре- ователя (рис. 2-4,6) учитываются только неизмен 31
- 32. ная по величине э. д. с. преобразователя Еан и его эквива лентное сопротивление 7?и- Уравнения равновесия э. д. с., характеризующие про цессы в асинхронном двигателе при произвольном сколь жении S, и.меют следующий вид; iB интер'вале 'времени L В интервале времени (2-36) dt (2-37) Выразим, как и ранее, время в относительных единицах (2-10) и примем следующие обозначения: 7’, — р, L Ti ’ т>--------------- ^ 2 “ Ri + Ryi Ri + Rk (2-38) ) Тогда уравнения (2-36) и (2-37) могут быть'Представ лены в следующем виде: 1 di dx di . + / = / 3; o < x < y ; (2-39) ______ .4 . / ^ / ' ; Y < x < l . Р'г dx 4> I Рещив уравнения (2-39) относительно то:^а, получим; <■= / , ( 1 0 < х < т : - '2-40 + (2-41 Значения начальных токов могут быть определены в соответствии с начальными условиями и режимом 'про текания тока. Как известно, 'В вентильном каскаде воз м о ж н ы два режима: непрерывных и прерывистых токоз Основным 'Режимом является 'режим непрерывных токоз_ является 'режим непрерывных токоз Режим прерывистых токов возможен при малых нагруз ках. 32