![BY 6820 U 2010.12.30
2
Полезная модель относится к медицине и может быть использована для тренировки
функции равновесия детей с детским церебральным параличом.
Детский церебральный паралич (ДЦП) - заболевание, вызванное поражением головно-
го мозга, обычно проявляющееся в раннем детском возрасте и характеризующееся двига-
тельными нарушениями: параличами, слабостью мышц, нарушением координации,
непроизвольными движениями.
Лечение ДЦП проводится, прежде всего, путем тренировки физических и психических
функций, позволяющих снизить выраженность неврологического дефекта. Для улучшения
мышечной функции используют лечебную физкультуру и трудовую терапию.
Известен стабилограф, который может быть использован для диагностики и тренинга
функции равновесия человека [1]. Стабилограф содержит опорную платформу, установ-
ленную на основании с помощью промежуточного элемента, датчики угла поворота опор-
ной платформы и промежуточного элемента. Опорная платформа выполнена с
возможностью поворота относительно промежуточного элемента. Промежуточный эле-
мент выполнен с возможностью поворота относительно основания, а оси поворота опор-
ной платформы и промежуточного элемента взаимно перпендикулярны. В
промежуточном элементе выполнены направляющие вдоль осей поворота опорной плат-
формы и промежуточного элемента, в которых установлены фрикционные кольца с воз-
можностью возвратно-поступательного перемещения вдоль указанных осей.
Недостатком известного стабилографа является то, что он не рассчитан на тренировку
детей с ДЦП различной степени тяжести. Ввиду нарушения координации движений и по-
ниженной способности контролировать положение тела в пространстве ребенок может
получить травму во время тренировки на тренажере.
Задачей полезной модели является расширение функциональных возможностей, сни-
жение травмоопасности путем оснащения стабилометра-тренажера опорой для рук.
Технический результат достигается тем, что в стабилографе-тренажере для детей с
детским церебральным параличом, содержащем опорную платформу, установленную на
основании с помощью промежуточного элемента, датчики угла поворота опорной плат-
формы и промежуточного элемента, причем опорная платформа выполнена с возможно-
стью поворота относительно промежуточного элемента, промежуточный элемент
выполнен с возможностью поворота относительно основания, а оси поворота опорной
платформы и промежуточного элемента взаимно перпендикулярны, в промежуточном
элементе выполнены направляющие вдоль осей поворота опорной платформы и промежу-
точного элемента, в которых установлены фрикционные кольца с возможностью возврат-
но-поступательного перемещения вдоль указанных осей. При этом стабилометр-тренажер
снабжен опорой для рук в виде рамной конструкции незамкнутого контура с не менее
тремя стойками, на которых установлены тензодатчики.
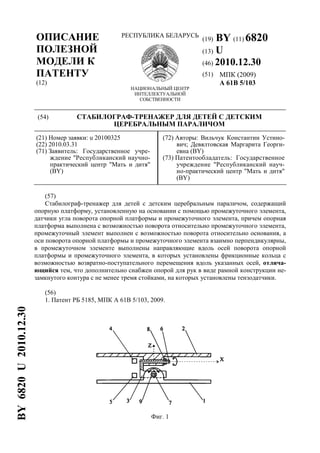
На фиг. 1 - схема стабилографа-тренажера.
На фиг. 2 - схема опоры для рук.
Стабилограф-тренажер содержит основание 1, на котором установлена опорная плат-
форма 2 посредством промежуточного элемента 3, датчики 4 и 5 угла поворота опорной
платформы 2 и промежуточного элемента 3 соответственно. В направляющих 6 и 7, вы-
полненных в промежуточном элементе 3, установлены фрикционные кольца 8 и 9 с при-
водами возвратно-поступательного перемещения (не показаны). Платформа 2 имеет
возможность поворота относительно промежуточного элемента 3, который имеет возмож-
ность поворота относительно основания 1. Оси поворота платформы 2 и промежуточного
элемента 3 взаимно перпендикулярны. Выходы датчиков 4 и 5 связаны с компьютером (не
показан).
Степень устойчивости платформы 2 регулируется путем изменения силы прижима
кольца 8 к платформе 2 и кольца 9 к промежуточному элементу 3 с помощью приводов
возвратно-поступательного перемещения (не показаны). Датчики 4 и 5 регистрируют пе-](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
More Related Content
Similar to 6820
Similar to 6820 (20)
6820
- 1. ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ (12) РЕСПУБЛИКА БЕЛАРУСЬ НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ (19) BY (11) 6820 (13) U (46) 2010.12.30 (51) МПК (2009) A 61B 5/103 (54) СТАБИЛОГРАФ-ТРЕНАЖЕР ДЛЯ ДЕТЕЙ С ДЕТСКИМ ЦЕРЕБРАЛЬНЫМ ПАРАЛИЧОМ (21) Номер заявки: u 20100325 (22) 2010.03.31 (71) Заявитель: Государственное учре- ждение "Республиканский научно- практический центр "Мать и дитя" (BY) (72) Авторы: Вильчук Константин Устино- вич; Девялтовская Маргарита Георги- евна (BY) (73) Патентообладатель: Государственное учреждение "Республиканский науч- но-практический центр "Мать и дитя" (BY) (57) Стабилограф-тренажер для детей с детским церебральным параличом, содержащий опорную платформу, установленную на основании с помощью промежуточного элемента, датчики угла поворота опорной платформы и промежуточного элемента, причем опорная платформа выполнена с возможностью поворота относительно промежуточного элемента, промежуточный элемент выполнен с возможностью поворота относительно основания, а оси поворота опорной платформы и промежуточного элемента взаимно перпендикулярны, в промежуточном элементе выполнены направляющие вдоль осей поворота опорной платформы и промежуточного элемента, в которых установлены фрикционные кольца с возможностью возвратно-поступательного перемещения вдоль указанных осей, отлича- ющийся тем, что дополнительно снабжен опорой для рук в виде рамной конструкции не- замкнутого контура с не менее тремя стойками, на которых установлены тензодатчики. (56) 1. Патент РБ 5185, МПК A 61B 5/103, 2009. Фиг. 1 BY6820U2010.12.30
- 2. BY 6820 U 2010.12.30 2 Полезная модель относится к медицине и может быть использована для тренировки функции равновесия детей с детским церебральным параличом. Детский церебральный паралич (ДЦП) - заболевание, вызванное поражением головно- го мозга, обычно проявляющееся в раннем детском возрасте и характеризующееся двига- тельными нарушениями: параличами, слабостью мышц, нарушением координации, непроизвольными движениями. Лечение ДЦП проводится, прежде всего, путем тренировки физических и психических функций, позволяющих снизить выраженность неврологического дефекта. Для улучшения мышечной функции используют лечебную физкультуру и трудовую терапию. Известен стабилограф, который может быть использован для диагностики и тренинга функции равновесия человека [1]. Стабилограф содержит опорную платформу, установ- ленную на основании с помощью промежуточного элемента, датчики угла поворота опор- ной платформы и промежуточного элемента. Опорная платформа выполнена с возможностью поворота относительно промежуточного элемента. Промежуточный эле- мент выполнен с возможностью поворота относительно основания, а оси поворота опор- ной платформы и промежуточного элемента взаимно перпендикулярны. В промежуточном элементе выполнены направляющие вдоль осей поворота опорной плат- формы и промежуточного элемента, в которых установлены фрикционные кольца с воз- можностью возвратно-поступательного перемещения вдоль указанных осей. Недостатком известного стабилографа является то, что он не рассчитан на тренировку детей с ДЦП различной степени тяжести. Ввиду нарушения координации движений и по- ниженной способности контролировать положение тела в пространстве ребенок может получить травму во время тренировки на тренажере. Задачей полезной модели является расширение функциональных возможностей, сни- жение травмоопасности путем оснащения стабилометра-тренажера опорой для рук. Технический результат достигается тем, что в стабилографе-тренажере для детей с детским церебральным параличом, содержащем опорную платформу, установленную на основании с помощью промежуточного элемента, датчики угла поворота опорной плат- формы и промежуточного элемента, причем опорная платформа выполнена с возможно- стью поворота относительно промежуточного элемента, промежуточный элемент выполнен с возможностью поворота относительно основания, а оси поворота опорной платформы и промежуточного элемента взаимно перпендикулярны, в промежуточном элементе выполнены направляющие вдоль осей поворота опорной платформы и промежу- точного элемента, в которых установлены фрикционные кольца с возможностью возврат- но-поступательного перемещения вдоль указанных осей. При этом стабилометр-тренажер снабжен опорой для рук в виде рамной конструкции незамкнутого контура с не менее тремя стойками, на которых установлены тензодатчики. На фиг. 1 - схема стабилографа-тренажера. На фиг. 2 - схема опоры для рук. Стабилограф-тренажер содержит основание 1, на котором установлена опорная плат- форма 2 посредством промежуточного элемента 3, датчики 4 и 5 угла поворота опорной платформы 2 и промежуточного элемента 3 соответственно. В направляющих 6 и 7, вы- полненных в промежуточном элементе 3, установлены фрикционные кольца 8 и 9 с при- водами возвратно-поступательного перемещения (не показаны). Платформа 2 имеет возможность поворота относительно промежуточного элемента 3, который имеет возмож- ность поворота относительно основания 1. Оси поворота платформы 2 и промежуточного элемента 3 взаимно перпендикулярны. Выходы датчиков 4 и 5 связаны с компьютером (не показан). Степень устойчивости платформы 2 регулируется путем изменения силы прижима кольца 8 к платформе 2 и кольца 9 к промежуточному элементу 3 с помощью приводов возвратно-поступательного перемещения (не показаны). Датчики 4 и 5 регистрируют пе-
- 3. BY 6820 U 2010.12.30 3 ремещения платформы 2 относительно основания 1 во взаимно перпендикулярных верти- кальных плоскостях (сагиттальной и фронтальной). Стабилометр-тренажер снабжен опорой для рук (фиг. 2) в виде рамной конструкции незамкнутого контура 10, которая установлена на стойках 11. Для обеспечения надежно- сти опоры стоек может быть три и более. На стойках 11 установлены тензодатчики 12, выходы которых связаны через тензометрический усилитель с компьютером (не показан). Стабилограф-тренажер работает следующим образом. Для тренировки ребенок становится в рекомендуемой позе на опорную платформу 2, степень устойчивости которой предварительно задана путем прижима с определенным усилием колец 8 и 9 соответственно к опорной платформе 2 и основанию 1 с помощью приводов возвратно-поступательного перемещения (не показаны). В течение заданного времени он должен удерживать равновесие, руководствуясь сигналами о перемещениях платформы 2, отображаемых в том или ином виде на экране компьютера (не показан). При этом ребенок должен минимизировать отклонения платформы 2 относительно ее нейтрального положения. По суммарной величине отклонения платформы 2 относительно ее нейтрального положения можно судить об эффективности функции равновесия ребенка при заданной степени устойчивости платформы 2. Изменив силу прижима колец 8 и 9 соответственно к опорной платформе 2 и основа- нию 1 с помощью приводов возвратно-поступательного перемещения, можно оценить функцию равновесия ребенка при другой степени устойчивости опорной платформы 2. В случае потери равновесия есть возможность воспользоваться опорой для рук. При этом сигнал от тензодатчиков 12 стоек 11 незамкнутого контура 10 поступает на тензо- метрический усилитель электрических сигналов (не показан) и суммируется с сигналами датчиков 4 и 5. Таким образом, в компьютере устройства имеется информация как об отдельных ве- личинах электрических сигналов опорной платформы (нижние конечности) и опоры для рук (верхние конечности), так и о суммарном электрическом сигнале. Сравнение численных значений электрических сигналов от датчиков 4 и 5 и тензодат- чиков 12 будет определять степень использования опоры для рук в общей тренировке. При длительных наблюдениях тренировок каждого ребенка можно оценить эффектив- ность тренировок по динамике соотношения показателей датчиков 4 и 5 (нижние конеч- ности) и тензодатчиков 12 (верхние конечности). Фиг. 2 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.