Download as PDF, PPTX



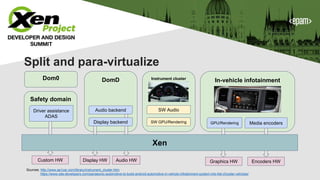
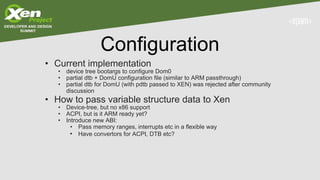

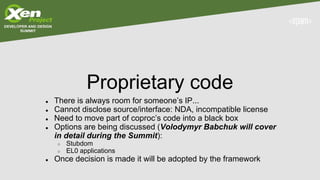
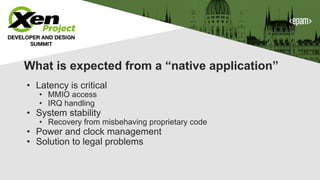

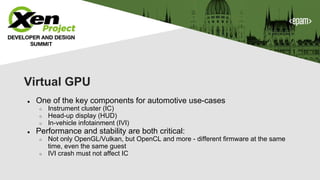
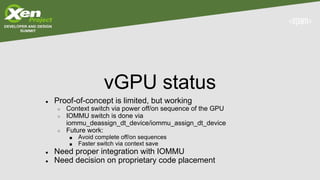
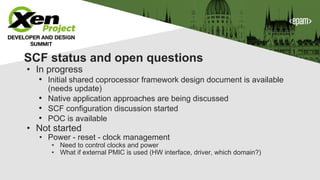



The document discusses the development of a shared coprocessor framework for ARM architecture, focusing on automotive use cases and various virtualized components. It highlights the benefits of sharing coprocessors to improve performance and manage complexity, as well as the challenges in configuring and scheduling virtual coprocessors. The framework aims to streamline the integration of hardware resources while ensuring safety and compatibility with existing systems.





























































![XPDDS19: [ARM] OP-TEE Mediator in Xen - Volodymyr Babchuk, EPAM Systems](https://cdn.slidesharecdn.com/ss_thumbnails/xendevsummit2019-babchuk-op-tee-190812095541-thumbnail.jpg?width=640&height=640&fit=bounds)

























