5555
(C) IDC FrontierInc. All Rights Reserved.
Linux基本操作 目次
1. dateコマンド
2. whoコマンド
3. ディレクトリ
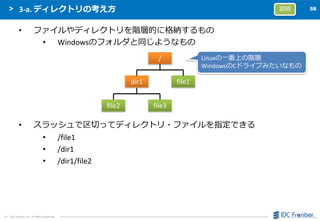
a. ディレクトリの考え方
b. 現在のディレクトリ
c. ディレクトリ作成
d. ディレクトリ移動
57.
5656
(C) IDC FrontierInc. All Rights Reserved.
1. dateコマンド
1. dateコマンドを実行
a. 表示されている「[root@ServerName ~]#」の後ろに『date』と入力す
る
b. 【Enterキー】を押す
c. 現在時刻が表示される
# date
2014年 11月 12日 水曜日 19:13:45 JST
現在時刻を表示するコマンド
操作
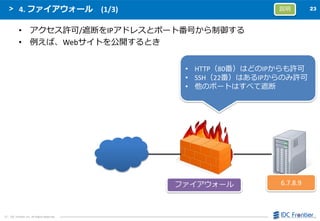
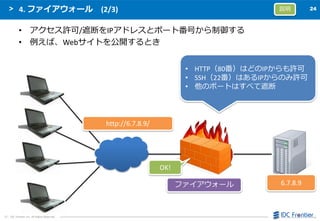
58.
5757
(C) IDC FrontierInc. All Rights Reserved.
2. whoコマンド
1. whoコマンドを実行
a. 『who -H』と入力する(whoと-Hの間にスペース)
b. 【Enterキー】を押す
c. 現在仮想マシン(Linux)にログインしているユーザーが表示される
# who -H
名前 端末 時間 コメント
root pts/0 2014-11-12 19:13 (1.2.3.4)
「-H」は「ヘッダを表示する」オプション。
「-H」がない場合と比べてみましょう
ユーザー
名
ログインした時間 操作端末のIP
操作
5959
(C) IDC FrontierInc. All Rights Reserved.
3-b. 現在のディレクトリ
• Linuxでは、コマンド操作するとき必ずどこかのディレクトリで作業している
• 現在のディレクトリは「pwd」コマンドで確認できる
例えば、「/dir1/dir2」ディレクトリで作業しているときに
「file1」を作成すると、「/dir1/dir2/file1」ができる
# pwd
/root
操作説明
61.
6060
(C) IDC FrontierInc. All Rights Reserved.
3-c. ディレクトリ作成
1. testディレクトリを作成
a. 「mkdir」コマンドを実行する
# mkdir test mkdirとtestの間にはスペース
操作
62.
6161
(C) IDC FrontierInc. All Rights Reserved.
3-d. ディレクトリ移動
1. testディレクトリに移動
a. 「cd」コマンドを実行する
b. 「pwd」コマンドで現在のディレクトリを確認する
2. もとのディレクトリに戻る
# cd test
# pwd
/root/test /rootの下にtestディレクトリが作られていて、
/root/testに移動している
# cd /root
操作
6666
(C) IDC FrontierInc. All Rights Reserved.
WordPressのインストール 目次
1. ダウンロード
2. WordPressの展開
3. ApacheのDocumentRoot
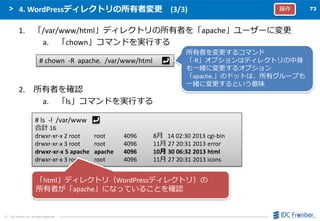
4. WordPressディレクトリの所有者変更
5. 初期設定
a. 設定ファイルを作成する
b. データベース情報の入力
c. サイトの設定
d. ログイン
e. サイト表示
f. 記事の投稿
68.
6767
(C) IDC FrontierInc. All Rights Reserved.
1. ダウンロード (1/2)
1. ブラウザでWordPress公式サイトにアクセスする
2. ダウンロードリンクをコピーする
http://ja.wordpress.org/
「.tar.gz」はLinuxでよく
使用される圧縮形式
操作





















































![5656
(C) IDC Frontier Inc. All Rights Reserved.
1. dateコマンド
1. dateコマンドを実行
a. 表示されている「[root@ServerName ~]#」の後ろに『date』と入力す
る
b. 【Enterキー】を押す
c. 現在時刻が表示される
# date
2014年 11月 12日 水曜日 19:13:45 JST
現在時刻を表示するコマンド
操作](https://image.slidesharecdn.com/wordpress-141225030801-conversion-gate02/85/WordPress-57-320.jpg)










![6868
(C) IDC Frontier Inc. All Rights Reserved.
1. ダウンロード (2/2)
1. 仮想マシンにダウンロード
a. 「wget」コマンドを実行する
# wget http://ja.wordpress.org/wordpress-4.0-ja.tar.gz
--2013-11-27 21:47:07-- http://ja.wordpress.org/wordpress-4.0-ja.tar.gz
ja.wordpress.org をDNSに問いあわせています... 66.155.40.249, 66.155.40.250
ja.wordpress.org|66.155.40.249|:80 に接続しています... 接続しました。
HTTP による接続要求を送信しました、応答を待っています... 200 OK
長さ: 5042472 (4.8M) [application/octet-stream]
`wordpress-4.0-ja.tar.gz' に保存中
100%[================================================>] 5,042,472 2.12M/s 時間 2.3s
2013-11-27 21:47:10 (2.12 MB/s) - `wordpress-4.0-ja.tar.gz' へ保存完了 [5042472/5042472]
まず「wget 」(最後にスペース)を入力する
TeraTermの場合、TeraTermの画面内で右クリックする
Macの場合、Terminalの画面内で右クリックし、ペースト
操作](https://image.slidesharecdn.com/wordpress-141225030801-conversion-gate02/85/WordPress-69-320.jpg)





















![[SDN JAPAN 2013] IaaS事業者が考える真のSDN](https://cdn.slidesharecdn.com/ss_thumbnails/sdnjapan2013iaassdnidc-130920041843-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)

















































![201312 scalr[oss] installation_idcf](https://cdn.slidesharecdn.com/ss_thumbnails/201312scalrossinstallationidcf-131227010319-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)








