Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Kimihiko Kitase
3,618 views
今話題のクラウドOSとは
Slides at Cloud Week 2013 @Hokkaido University
Technology
◦
Read more
5
Save
Share
Embed
Embed presentation
Download
Downloaded 51 times
1
/ 51
2
/ 51
3
/ 51
4
/ 51
5
/ 51
6
/ 51
7
/ 51
8
/ 51
9
/ 51
10
/ 51
11
/ 51
12
/ 51
13
/ 51
14
/ 51
15
/ 51
16
/ 51
17
/ 51
18
/ 51
19
/ 51
20
/ 51
21
/ 51
22
/ 51
23
/ 51
24
/ 51
25
/ 51
26
/ 51
27
/ 51
28
/ 51
29
/ 51
30
/ 51
31
/ 51
32
/ 51
33
/ 51
34
/ 51
35
/ 51
36
/ 51
37
/ 51
38
/ 51
39
/ 51
40
/ 51
41
/ 51
42
/ 51
43
/ 51
44
/ 51
45
/ 51
46
/ 51
47
/ 51
48
/ 51
49
/ 51
50
/ 51
51
/ 51
More Related Content
PDF
Oralce Solaris 11
by
SolarisJP
PPTX
Japan elasticusergroup01 Acroquest
by
Hiroshi Yoshioka
PDF
クラウドサービスの基本的な事
by
Mitsuaki Kida
PDF
【JEUG】 オープンSIEMの世界へ
by
Hibino Hisashi
PDF
ITアーキテクトのためのOracle Cloud Platform設計・構築入門 [Oracle Cloud Days Tokyo 2016]
by
オラクルエンジニア通信
PDF
User interface of CLOUDIAN HyperStore
by
CLOUDIAN KK
PDF
#01-01 Oracle Solaris 11 The First Cloud OS -Night Seminar version-
by
SolarisJPNight
PDF
ビッグデータのセキュリティ/プライバシーにおける十大脅威(日本語訳)
by
Eiji Sasahara, Ph.D., MBA 笹原英司
Oralce Solaris 11
by
SolarisJP
Japan elasticusergroup01 Acroquest
by
Hiroshi Yoshioka
クラウドサービスの基本的な事
by
Mitsuaki Kida
【JEUG】 オープンSIEMの世界へ
by
Hibino Hisashi
ITアーキテクトのためのOracle Cloud Platform設計・構築入門 [Oracle Cloud Days Tokyo 2016]
by
オラクルエンジニア通信
User interface of CLOUDIAN HyperStore
by
CLOUDIAN KK
#01-01 Oracle Solaris 11 The First Cloud OS -Night Seminar version-
by
SolarisJPNight
ビッグデータのセキュリティ/プライバシーにおける十大脅威(日本語訳)
by
Eiji Sasahara, Ph.D., MBA 笹原英司
What's hot
PDF
Sec016 詳説 -_rights_management_services__azure_information_protection
by
Tech Summit 2016
PDF
今日からIT女子になる!クラウド基礎~SoftLayer入門編
by
Yuichi Tamagawa
PDF
20170714_MySQL 5.7 GIS(地理情報システム) by 日本オラクル株式会社 MySQL GBU 山﨑由章
by
Insight Technology, Inc.
PDF
MySQL Fabric with OpenStack Nova
by
Shinya Sugiyama
PDF
Oracle Cloud IaaS活用:VMwareをそのままパブリック・クラウドへ&Windowsならオラクル [Oracle Cloud Days T...
by
オラクルエンジニア通信
PDF
ログ分析からセキュリティ監視まで:Oracle Management Cloudで実現するIT運用データのビッグデータ分析 [Oracle Cloud D...
by
オラクルエンジニア通信
PDF
【YahooJapanMeetup#31LT】ElasticStack on AWS DeepDive
by
Hibino Hisashi
PDF
db tech showcase2016 - MySQLドキュメントストア
by
Shinya Sugiyama
PDF
Logstashを愛して5年、370ページを超えるガチ本を書いてしまった男の話.
by
Hibino Hisashi
PDF
20170714_MySQLドキュメントストア JSONデータ型&JSON関数 by 日本オラクル株式会社 MySQL GBU 山﨑由章
by
Insight Technology, Inc.
PDF
オラクルGO!話題の位置情報アプリをクラウドで簡単に作ってみる [Oracle Cloud Developer Day 2016]
by
オラクルエンジニア通信
PDF
ぜんぜんスマートじゃないプライベートクラウドの現実 - 運用担当者が苦労する4つの問題と3つの救済策
by
エクイニクス・ジャパン
PDF
Jazug_202102_csc_ichikawa
by
Yuto Ichikawa
PDF
IT エンジニアのための 流し読み Windows 10 - Microsoft Defender ウイルス対策
by
TAKUYA OHTA
Sec016 詳説 -_rights_management_services__azure_information_protection
by
Tech Summit 2016
今日からIT女子になる!クラウド基礎~SoftLayer入門編
by
Yuichi Tamagawa
20170714_MySQL 5.7 GIS(地理情報システム) by 日本オラクル株式会社 MySQL GBU 山﨑由章
by
Insight Technology, Inc.
MySQL Fabric with OpenStack Nova
by
Shinya Sugiyama
Oracle Cloud IaaS活用:VMwareをそのままパブリック・クラウドへ&Windowsならオラクル [Oracle Cloud Days T...
by
オラクルエンジニア通信
ログ分析からセキュリティ監視まで:Oracle Management Cloudで実現するIT運用データのビッグデータ分析 [Oracle Cloud D...
by
オラクルエンジニア通信
【YahooJapanMeetup#31LT】ElasticStack on AWS DeepDive
by
Hibino Hisashi
db tech showcase2016 - MySQLドキュメントストア
by
Shinya Sugiyama
Logstashを愛して5年、370ページを超えるガチ本を書いてしまった男の話.
by
Hibino Hisashi
20170714_MySQLドキュメントストア JSONデータ型&JSON関数 by 日本オラクル株式会社 MySQL GBU 山﨑由章
by
Insight Technology, Inc.
オラクルGO!話題の位置情報アプリをクラウドで簡単に作ってみる [Oracle Cloud Developer Day 2016]
by
オラクルエンジニア通信
ぜんぜんスマートじゃないプライベートクラウドの現実 - 運用担当者が苦労する4つの問題と3つの救済策
by
エクイニクス・ジャパン
Jazug_202102_csc_ichikawa
by
Yuto Ichikawa
IT エンジニアのための 流し読み Windows 10 - Microsoft Defender ウイルス対策
by
TAKUYA OHTA
Viewers also liked
PDF
クラウドで消耗してませんか?
by
IIJ
PPTX
Cloud OSの進化を考える
by
maruyama097
PDF
IoTとDeep Learningで自宅警備員を育ててみる
by
Yasuyuki Sugai
PDF
AWSで実現するクラウドネイティブなアプリ開発のポイント
by
Keisuke Nishitani
PDF
【AWS初心者向けWebinar】AWSのプロビジョニングからデプロイまで
by
Amazon Web Services Japan
PDF
【掲載用】アウトプットし続ける技術20170314
by
Hayashi Masayuki
クラウドで消耗してませんか?
by
IIJ
Cloud OSの進化を考える
by
maruyama097
IoTとDeep Learningで自宅警備員を育ててみる
by
Yasuyuki Sugai
AWSで実現するクラウドネイティブなアプリ開発のポイント
by
Keisuke Nishitani
【AWS初心者向けWebinar】AWSのプロビジョニングからデプロイまで
by
Amazon Web Services Japan
【掲載用】アウトプットし続ける技術20170314
by
Hayashi Masayuki
Similar to 今話題のクラウドOSとは
PDF
CloudStack Overview(OSC2012Kansai@Kyoto)
by
Satoshi Shimazaki
PDF
OSSではじめるオープン・スタンダードのクラウド @201304
by
Shinichiro Arai
PDF
オープンソースのクラウド基盤 CloudStackによるIaaS構築入門 @OSC 2013 Nagoya
by
Satoshi Shimazaki
PDF
Build-Cloud-By-Open-Source-Software
by
Kimihiko Kitase
KEY
Cloudってどんなもの?
by
Kazuto Kusama
PDF
OSC2013.cloud@Osaka
by
Satoshi Shimazaki
PDF
「hbstudy#23 OpenStack祭!!」資料 ~OpenStackプロジェクトの全体像~
by
Masanori Itoh
PDF
CloudStack Overview
by
Kimihiko Kitase
PDF
【セミナー講演資料】オープンクラウドソリューションのご紹介
by
Nissho-Blocks
PPTX
OSSのクラウド基盤 OpenStack / CloudStack
by
VirtualTech Japan Inc.
PDF
第8回「シトリックスが目指すクラウドとデスクトップ仮想化を支える技術」(2011/09/15 on しすなま!) ③Citrix様資料#2
by
System x 部 (生!) : しすなま! @ Lenovo Enterprise Solutions Ltd.
PDF
CloudStack Architecture
by
Kimihiko Kitase
PDF
(Japanese) Build A Cloud With Open Source
by
Kimihiko Kitase
PDF
OSC2013 Tokyo Spring OpenStack Overview
by
irix_jp
PDF
IBM and Open @201311
by
Shinichiro Arai
PDF
CloudStack Overview@OSC2012Fukuoka
by
Satoshi Shimazaki
PDF
OpenStackプロジェクトの全体像~詳細編~
by
Masanori Itoh
PDF
"NAZE? NANI? CloudStack" on OSC Sendai 2011 / May 21 2011
by
Masahito Zembutsu
PDF
OpenCloudCampus : Cloud Technologies Meeting (OpenStack)
by
Masanori Itoh
PPTX
OSSのクラウド基盤 OpenStack / CloudStack
by
Nobuyuki Tamaoki
CloudStack Overview(OSC2012Kansai@Kyoto)
by
Satoshi Shimazaki
OSSではじめるオープン・スタンダードのクラウド @201304
by
Shinichiro Arai
オープンソースのクラウド基盤 CloudStackによるIaaS構築入門 @OSC 2013 Nagoya
by
Satoshi Shimazaki
Build-Cloud-By-Open-Source-Software
by
Kimihiko Kitase
Cloudってどんなもの?
by
Kazuto Kusama
OSC2013.cloud@Osaka
by
Satoshi Shimazaki
「hbstudy#23 OpenStack祭!!」資料 ~OpenStackプロジェクトの全体像~
by
Masanori Itoh
CloudStack Overview
by
Kimihiko Kitase
【セミナー講演資料】オープンクラウドソリューションのご紹介
by
Nissho-Blocks
OSSのクラウド基盤 OpenStack / CloudStack
by
VirtualTech Japan Inc.
第8回「シトリックスが目指すクラウドとデスクトップ仮想化を支える技術」(2011/09/15 on しすなま!) ③Citrix様資料#2
by
System x 部 (生!) : しすなま! @ Lenovo Enterprise Solutions Ltd.
CloudStack Architecture
by
Kimihiko Kitase
(Japanese) Build A Cloud With Open Source
by
Kimihiko Kitase
OSC2013 Tokyo Spring OpenStack Overview
by
irix_jp
IBM and Open @201311
by
Shinichiro Arai
CloudStack Overview@OSC2012Fukuoka
by
Satoshi Shimazaki
OpenStackプロジェクトの全体像~詳細編~
by
Masanori Itoh
"NAZE? NANI? CloudStack" on OSC Sendai 2011 / May 21 2011
by
Masahito Zembutsu
OpenCloudCampus : Cloud Technologies Meeting (OpenStack)
by
Masanori Itoh
OSSのクラウド基盤 OpenStack / CloudStack
by
Nobuyuki Tamaoki
More from Kimihiko Kitase
PDF
ライトプランで利用可能な分析基盤「IBM Analytics Engine (IAE)」とは
by
Kimihiko Kitase
PDF
クラウドにおけるビッグデータ分析環境
by
Kimihiko Kitase
PDF
最新事例から学ぶビッグデータの活用法 #ocif16 #hortonworks
by
Kimihiko Kitase
PDF
Hortonworksが提供する データ活用方法の紹介
by
Kimihiko Kitase
PDF
Hadoop Summit 2016 San Jose レポート
by
Kimihiko Kitase
PDF
SoftLayer Bluemix Community Festa 2016 Program Guide
by
Kimihiko Kitase
PDF
2016年冬 IBMクラウド最新動向と概要
by
Kimihiko Kitase
PDF
2016年冬 IBMクラウド最新動向
by
Kimihiko Kitase
PDF
クラウドを活用した システム開発は適材適所
by
Kimihiko Kitase
PDF
Try IoT with Node-RED
by
Kimihiko Kitase
PDF
ホスティッドプライベートクラウド勉強会 ~Azure Pack on SoftLayer ~
by
Kimihiko Kitase
PDF
話題のNode-REDでIoTアプリを作ってみよう
by
Kimihiko Kitase
PDF
SoftLayer最新動向と賢い利用方法
by
Kimihiko Kitase
PDF
SoftLayer Bluemix Intro
by
Kimihiko Kitase
PDF
SoftLayer Bluemix Summit 2015 Flyer
by
Kimihiko Kitase
PDF
OSC15 Okinawa Intro SoftLayer and Bluemix
by
Kimihiko Kitase
PDF
Introduction of public cloud softlayer and bluemix
by
Kimihiko Kitase
PDF
SoftLayer Bluemix Summit 2015
by
Kimihiko Kitase
PDF
クラウドに構築したWebサイトのセキュリティ対策やグローバル展開について
by
Kimihiko Kitase
PDF
Introduction softlayer and bluemix
by
Kimihiko Kitase
ライトプランで利用可能な分析基盤「IBM Analytics Engine (IAE)」とは
by
Kimihiko Kitase
クラウドにおけるビッグデータ分析環境
by
Kimihiko Kitase
最新事例から学ぶビッグデータの活用法 #ocif16 #hortonworks
by
Kimihiko Kitase
Hortonworksが提供する データ活用方法の紹介
by
Kimihiko Kitase
Hadoop Summit 2016 San Jose レポート
by
Kimihiko Kitase
SoftLayer Bluemix Community Festa 2016 Program Guide
by
Kimihiko Kitase
2016年冬 IBMクラウド最新動向と概要
by
Kimihiko Kitase
2016年冬 IBMクラウド最新動向
by
Kimihiko Kitase
クラウドを活用した システム開発は適材適所
by
Kimihiko Kitase
Try IoT with Node-RED
by
Kimihiko Kitase
ホスティッドプライベートクラウド勉強会 ~Azure Pack on SoftLayer ~
by
Kimihiko Kitase
話題のNode-REDでIoTアプリを作ってみよう
by
Kimihiko Kitase
SoftLayer最新動向と賢い利用方法
by
Kimihiko Kitase
SoftLayer Bluemix Intro
by
Kimihiko Kitase
SoftLayer Bluemix Summit 2015 Flyer
by
Kimihiko Kitase
OSC15 Okinawa Intro SoftLayer and Bluemix
by
Kimihiko Kitase
Introduction of public cloud softlayer and bluemix
by
Kimihiko Kitase
SoftLayer Bluemix Summit 2015
by
Kimihiko Kitase
クラウドに構築したWebサイトのセキュリティ対策やグローバル展開について
by
Kimihiko Kitase
Introduction softlayer and bluemix
by
Kimihiko Kitase
Recently uploaded
PDF
PMBOK 7th Edition Project Management Process Scrum
by
akipii ogaoga
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
PDF
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
PDF
PMBOK 7th Edition_Project Management Context Diagram
by
akipii ogaoga
PDF
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
PDF
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
PDF
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
PDF
PMBOK 7th Edition_Project Management Process_WF Type Development
by
akipii ogaoga
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
PDF
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
PMBOK 7th Edition Project Management Process Scrum
by
akipii ogaoga
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
PMBOK 7th Edition_Project Management Context Diagram
by
akipii ogaoga
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
PMBOK 7th Edition_Project Management Process_WF Type Development
by
akipii ogaoga
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
今話題のクラウドOSとは
1.
シトリックス・システムズ・ジャパン(株) ソリューションマーケティングマネージャー 北北瀬 公彦 今話題のクラウドOSとは
2.
Citrix Systems Inc.
について 設⽴立立: 1989年年 所在地:フロリダ州、フォート ローダデール カリフォルニア州、サンタ クレラ CEO: Mark B. Templeton 株式公開: NASDAQ(CTXS) 売上: 25.9億ドル(2012年年度度) 従業員数: 7,325名(30ヵ国) パートナー: 100ヶ国 の10,000社以上 お客様: ワールドワイド 260,000社以上
3.
シトリックス・システムズ・ジャパン株式会社 設⽴立立: 1997年年 所在地: 東京都千代⽥田区霞が関3-‐‑‒2-‐‑‒1
霞が関コモンゲート⻄西館24階 ⻄西⽇日本⽀支社:⼤大阪市北北区梅⽥田2-‐‑‒2-‐‑‒2 ヒルトンプラザウエストオフィスタワー19F 代表取締役社⻑⾧長: マイケル キング 従業員数: 202名(2013年年3⽉月現在) シトリックス・システムズ・ジャパンR&D(株) 設⽴立立: 2007年年 所在地: 東京都千代⽥田区 代表取締役社⻑⾧長: マイケル キング 従業員数: 28名 2011年年 第11回テレワーク推進賞 優秀賞受賞 2012年年 ⽇日経BP主催「第5回クラウドランキング」にて 「ベストブランド」に3回連続で選出
4.
アジェンダ • クラウドって • クラウドの構築 • クラウドOS • サーバー仮想化ソフトウェア • ストレージ • ネットワーク • 監視、管理理、ログ解析、⾃自動化 • 事例例 • まとめ
5.
クラウドって?
6.
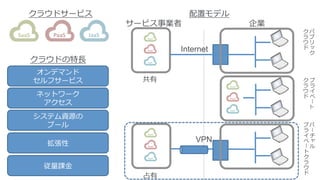
オンデマンド セルフサービス ネットワーク アクセス システム資源の プール 拡張性 従量量課⾦金金 クラウドサービス クラウドの特⻑⾧長 VPN Internet 共有 サービス事業者 企業 配置モデル パ ブ リ ク ク ラ ウ ド プ ラ イ ベ ー ト ク ラ ウ ド バ ー チ ル プ ラ イ ベ ー ト ク ラ ウ ド 占有
7.
アーキテクチャー
8.
クラウドの構築
9.
クラウドの構築 テスト環境での構築 採⽤用する技術アーキテクチャの決定 必要な機能の決定 ターゲットユーザーの決定 クラウド
10.
ターゲットユーザーの決定 • Webアプリケーション • ソフトウェア開発、テスト • SMB ITサービス • ソーシャルアプリケーション • メディア、コンテンツ配信 • ゲーム • ディザスターリカバリー • 並列列分散処理理 • HPC 10
11.
必要な機能の決定 仮想マシン • リサイジング • ⾼高可⽤用性 • クローン • 監視 • Windows • Linux • 名前 • グルーピング • セキュリティ ネットワーク • ユーザー毎の ネットワーク • ファイアウォー ル • ロードバランサ ー • IPアドレス管理理 • 仮想スイッチ • VPN • Intrusion Prevention ストレージ • 仮想ディスク⽤用 のストレージ • テンプレート、 イメージ • 分散ストレージ • ⾃自動スナップ ショット • ストレージへの アクセス権 • ディスク監視 • 暗号化 テンプレート管 理理 • マスターテンプ レート • ユーザテンプ レート • マスターISO • ユーザーISO • テンプレートマ イグレーション 管理理機能 • ロールベース管 理理 • ライブマイグ レーション • 課⾦金金情報の収集 • ユーザーイン ターフェイス • アクセスコント ロール • マルチハイパー バイザー • オープンソース • マルチデータセ ンター
12.
クラウドOS (クラウド基盤ソフトウェア)
13.
クラウドOS
14.
OpenStack VS CloudStack OpenStack
CloudStack 開発経緯 NASA(アメリカ航空宇宙局)が開発した「Nova」 と⽶米国の⼤大⼿手IaaSベンダーであるRackspace, US Incが開発した「Swift」を統合し、 「OpenStack」として発表。現在はRackspace, US Incが開発主体 VMOps, Incから2010年年5⽉月にリリースされた バージョン2.0でのオープンソース化をきっかけ に、社名をCloud.com Incに変更更。Citrix Systems, Incが2011年年7⽉月にCloud.comを買収し、 2012年年4⽉月にASFへの寄贈発表。2013年年4⽉月、 Incubation段階を抜け、Apache Top Level Projectに プロジェクト運営/開発主体 OSF、Rackspace, Red Hat 他 ASF、Citrix、Sungurd、他 提供エディション オープンソース版(OSF) 商⽤用版(Red Hat) オープンソース版 (ASF)、 商⽤用版(Citrix Systems, Inc) ライセンス Apache 2.0 Apache 2.0 最新バージョン Grizzly 4.1 次期バージョン Havana 4.2 ユーザ会(⽇日本) ⽇日本OpenStackユーザ会 ⽇日本CloudStackユーザ会 公式Twitter @OpenStack @CloudStack | @CloudStackJA ⾔言語 Python Java ハイパーバイザ KVM, LXC, QEMU, UML, VMWare(ESX/ESXi 4.1 update 1), XenServer KVM, Xen, XenServer, VMware(vSphere) Web API 独⾃自API。EC2/EBS, S3互換APIを装備しており、 Eucalyptusにより提供されている「Euca2ools」 が使⽤用可能 独⾃自API。EC2, S3互換APIを装備しており、 CloudStack APIに変換することが可能 2012年年11⽉月15⽇日 Citrix Cloud Vision, 国際⼤大学GLOCOM 客員研究員 林林雅之⽒氏による「オープンクラウドの最新動向」よりアップデート
15.
OpenStack – プロジェクト構成 • 複数のコンポーネントで構成され、 相互に連携することでサービスを提供 ᵒ
Nova ・・・ハイパーバイザー制御 ᵒ Glance ・・・イメージ、スナップショット管理理 ᵒ Swift ・・・オブジェクトストレージ ᵒ Keystone ・・・統合認証基盤 ᵒ Horzion ・・・セルフサービスWebUI ᵒ Cinder ・・・ブロックストレージ制御 ᵒ Quantum ・・・仮想ネットワーク制御 ※これらのコンポーネントは 単独利利⽤用も可能
16.
CloudStackとは • IaaSクラウド構築・管理理ソフトウェア • リッチなセルフサービスポータル ᵒ
管理理者⽤用、グループ管理理者⽤用、ユーザー⽤用 • 豊富なネットワークサービス ᵒ LB, FW, VPN, NAT等 ᵒ 外部ネットワーク機器連携 • 豊富な採⽤用事例例 • オープンソース ᵒ Apache Software Foundationにより開発 ᵒ Apache CloudStack (6/5: 4.1) • 商⽤用ディストリビューション ᵒ Citrix CloudPlatform (6/20: 3.0.7)
17.
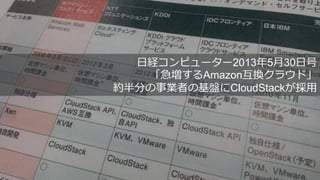
⽇日経コンピューター2013年年5⽉月30⽇日号 「急増するAmazon互換クラウド」 約半分の事業者の基盤にCloudStackが採⽤用
18.
Apache CloudStackとは • Apache
Software Foundationにより管理理 • 最新版: 4.1.1 (4.2: 8⽉月中旬予定) • 他社連携機能が実装されやすい – 拠点間VPN (4.0) – Nicira NVP対応 (4.0) – Ceph RBD連携 (4.0) – Caringo連携 (4.0) など • 最新機能が実装されやすい – EC2/S3 API変換機能 – 多階層ネットワーク構成 など
19.
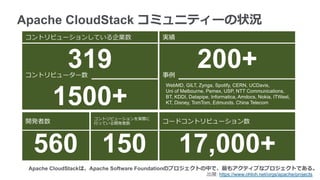
コントリビューションしている企業数 319コントリビューター数 1500+ 開発者数 560 コントリビューションを実際に ⾏行行っている開発者数 150 実績 200+事例例 WebMD, GILT, Zynga,
Spotify, CERN, UCDavis, Uni of Melbourne, Pemex, USP, NTT Communications, BT, KDDI, Datapipe, Informatica, Amdocs, Nokia, ITWest, KT, Disney, TomTom, Edmunds. China Telecom コードコントリビューション数 17,000+ Apache CloudStackは、Apache Software Foundationのプロジェクトの中で、最もアクティブなプロジェクトである。 出展: https://www.ohloh.net/orgs/apache/projects Apache CloudStack コミュニティーの状況
20.
Citrix CloudPlatformとは • Apache
CloudStackをベースに開発した Citrixの商⽤用ディストリビューション • Citrix XenServer有償版を包含 • CloudPortal Business Managerとの連携 • Citrixによる徹底的なテスト • Citrixによるサービス提供 • 最新版: 3.0.7 • 新機能 – 多階層ネットワーク構成 – 拠点間VPN – オートスケール(NetScaler連携)
21.
インテグレーション⽤用 API ユーザインターフェース 開発者⽤用API Amazon
CloudStack管理理者 エンドユーザ コンソール アベイラビリティとセキュリティー サーバー ネットワーク ストレージ 仮想化レイヤー サーバ ストレージ ネットワーク ダイナミック・ワークロード管理理 バックアップ ロードバランサー 冗⻑⾧長化 監視 イメージ・ライブラリ アプリケーションカタログ カスタム・テンプレート オペレーティングシステム、ISOsリソース管理理 統合オペレーション (OSS/BSS,監視, ID管理理 , その他)⼀一般的なIaaS のアーキテクチャ
22.
インテグレーション⽤用 API ユーザインターフェース 開発者⽤用API Amazon Open Stack カスタム管理理者
エンドユーザ コンソール アベイラビリティとセキュリティー サーバー ネットワーク ストレージ 仮想化レイヤー サーバ ストレージ ネットワーク ダイナミック・ワークロード管理理 バックアップ ロードバラン サー 冗⻑⾧長化 監視 イメージ・ライブラリィ アプリケーションカタログ カスタム・テンプレート オペレーティングシステム、ISOs リソース管理理 ⼀一般的なIaaS のアーキテクチャ 統合オペレーション (OSS/BSS,監視, ID管理理 , その他)
23.
セカンダリストレージ (NFS, OpenStack Swift) 管理理サーバー
ネットワーク機器 (LB, FW, SDN/OpenFlow) セルフサービスポータル プライマリストレージ (NFS, iSCSI, FC SAN, Local) CloudStack アーキテクチャ概要
24.
サーバー仮想化ソフトウェア (ハイパーバイザー)
25.
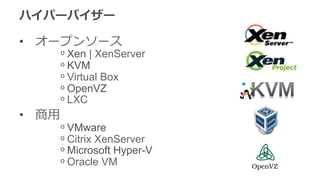
ハイパーバイザー • オープンソース ᵒ Xen |
XenServer ᵒ KVM ᵒ Virtual Box ᵒ OpenVZ ᵒ LXC • 商⽤用 ᵒ VMware ᵒ Citrix XenServer ᵒ Microsoft Hyper-V ᵒ Oracle VM
26.
ストレージ
27.
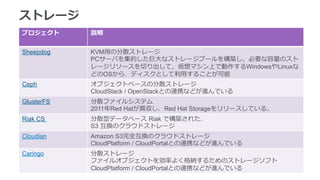
ストレージ プロジェクト 説明 Sheepdog KVM⽤用の分散ストレージ PCサーバを集約した巨⼤大なストレージプールを構築し,必要な容量量のスト レージリソースを切切り出して,仮想マシン上で動作するWindowsやLinuxな どのOSから、ディスクとして利利⽤用することが可能 Ceph
オブジェクトベースの分散ストレージ CloudStack / OpenStackとの連携などが進んでいる GlusterFS 分散ファイルシステム 2011年年Red Hatが買収し、Red Hat Storageをリリースしている。 Riak CS 分散型データベース Riak で構築された、 S3 互換のクラウドストレージ Cloudian Amazon S3完全互換のクラウドストレージ CloudPlatform / CloudPortalとの連携などが進んでいる Caringo 分散ストレージ ファイルオブジェクトを効率率率よく格納するためのストレージソフト CloudPlatform / CloudPortalとの連携などが進んでいる
28.
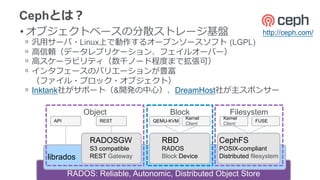
• オブジェクトベースの分散ストレージ基盤 ᵒ 汎⽤用サーバ・Linux上で動作するオープンソースソフト (LGPL) ᵒ
⾼高信頼(データレプリケーション、フェイルオーバー) ᵒ ⾼高スケーラビリティ(数千ノード程度度まで拡張可) ᵒ インタフェースのバリエーションが豊富 (ファイル・ブロック・オブジェクト) ᵒ Inktank社がサポート(&開発の中⼼心)、DreamHost社が主スポンサー Cephとは? RADOS: Reliable, Autonomic, Distributed Object Store librados RADOSGW S3 compatible REST Gateway RBD RADOS Block Device CephFS POSIX-compliant Distributed filesystem Object Block Filesystem QEMU-KVM Kernel Client Kernel Client FUSERESTAPI http://ceph.com/
29.
• Ceph上でブロックストレージを提供 ᵒ データはOSD (Object
Storage Device) プールに オブジェクトとして分散配置 • ディフォルトでは4MB単位で分散 • Thin Provisioning (使⽤用している領領域のみ実スペースを占有) ᵒ MonitorはOSDの構成・レイアウト管理理、各サーバーの⽣生存確認等を⾏行行う • クライアントはMonitorからレイアウト情報を⼊入⼿手し、OSDへアクセスする RBD: RADOS Block Device OSD Monitor OSD OSD OSD OSD Client 仮想Disk クラスタ構成 レイアウト情報
30.
ネットワーク
31.
SDN (Software Defined
Networking) アプリケーション層 コントロール層 (コントロールプレーン) インフラ層 (データプレーン) アプリケーション ネットワークサービス SDN コントローラー API API ネットワーク 機器 ネットワーク 機器 ネットワーク 機器 ネットワーク 機器 ネットワーク 機器 ネットワーク 機器 データプレーンを制御 (例例: OpenFlow)
32.
OpenDaylight 出典: OpenDaylight Project
Technical Overview http://www.opendaylight.org/project/technical-overview
33.
OpenDaylight ボードメンバー
34.
監視、管理理、ログ解析、⾃自動化
35.
監視ツール ライセンス タイプ 収集⽅方法 Cacti RRDTool GPL
パフォーマンス SNMP, syslog Graphite Apache 2.0 パフォーマンス Agent Nagios GPL 死活監視 SNMP,TCP, ICMP, IPMI, syslog Zabbix GPL 死活監視 パフォーマンス その他 SNMP, TCP/ICMP, IPMI, Synthetic Transactions Zenoss GPL 死活監視 パフォーマンス イベント管理理 SNMP, ICMP, SSH, syslog, WMI Hinemos 死活監視 パフォーマンス ジョブ管理理 API, SNMP, etc Munin 監視
36.
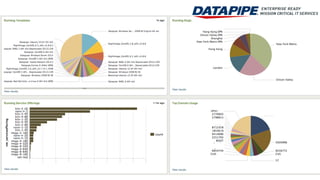
ログ管理理、解析 • クラウド基盤、ネットワークサービス基盤 でのログは膨⼤大 • 問題の原因追求に膨⼤大な時間がかかる • ログ解析ツール ᵒ Splunk ᵒ Elasticsearch
+ Logstash + Kibana
39.
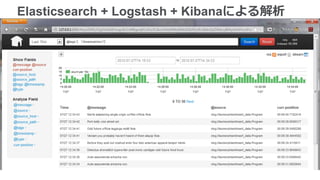
Elasticsearch + Logstash
+ Kibanaによる解析
40.
サーバー⾃自動構成ツール
41.
事例例
42.
北北海道⼤大学 情報基盤センター 国内最⼤大級のアカデミッククラウドの事例例 • 全国の⼤大学、研究機関の活動を⽀支援する情報環境に •
⽇日⽴立立のBladeSymphonyハイエンドモデル「BS2000」を採⽤用 • 仮想化基盤ソフトウェア: Citrix XenServerを採⽤用 ᵒ 管理理運⽤用コストの⼤大幅な低減 ᵒ 消費電⼒力力 1/5 〜~ 1/10程度度まで削減 • クラウド管理理ミドルウェア: Citrix社のCloudPlatformを採⽤用 ᵒ ポータルから⼀一元的にバーチャルマシンの申請、管理理、運⽤用を可能 • 提供サービス ᵒ 仮想サーバー、クラスタシステム、コンテンツマネジメントシステム、アプ リケーションサービス、オンラインストレージサービス、ブログサービス等、 研究者にとって必要となる各種サービスの提供
43.
KDDI (KDDI クラウドプラットフォームサービス) •
課題 ᵒ サービス提供の迅速化を⽬目的に、新たなク ラウドサービスの構築を検討 • ソリューション ᵒ 実績と機能を評価してCloudPlatformを採⽤用 ᵒ KDDI クラウドプラットフォームサービス によりお客さまのニーズに迅速に対応 • 導⼊入効果 ᵒ オンデマンドでクラウド基盤を提供できる ようになりお客さま満⾜足度度も向上 • グローバル展開 ᵒ 2013年年9⽉月2⽇日より順次、アジア、⽶米国、欧 州において提供開始
44.
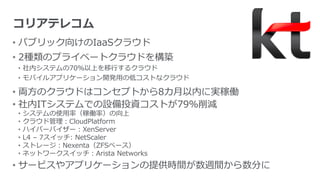
コリアテレコム • パブリック向けのIaaSクラウド • 2種類のプライベートクラウドを構築 • 社内システムの70%以上を移⾏行行するクラウド • モバイルアプリケーション開発⽤用の低コストなクラウド • 両⽅方のクラウドはコンセプトから8カ⽉月以内に実稼働 • 社内ITシステムでの設備投資コストが79%削減 •
システムの使⽤用率率率(稼働率率率)の向上 • クラウド管理理:CloudPlatform • ハイパーバイザー:XenServer • L4 – 7スイッチ: NetScaler • ストレージ:Nexenta(ZFSベース) • ネットワークスイッチ:Arista Networks • サービスやアプリケーションの提供時間が数週間から数分に
45.
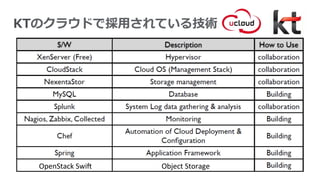
OpenStack Swi- Object
Storage KTのクラウドで採⽤用されている技術
46.
アマゾンの様な社内システムの構築 べクテル(⽶米国⼤大⼿手建設会社) • ⾮非常に複雑な社内ITサービス提供ポリシー • 公共事業向けのセキュリティ •
コンプライアンス準拠 • CloudPlatform + XenServer + enStratiusを使⽤用したプ ライベートクラウドの構築 • サービスの提供プロセスをユーザーフレンドリにしたことにより 効率率率的なプロジェクト管理理を実現 • オンデマンドなサービスの提供により、 作業効率率率、調達スピードなどが向上 • ガバナンスやアプリケーションの事業継続性の改善 • プロセスの統⼀一と⾃自動化によるサービスの品質の向上
47.
まとめ
48.
まとめ • クラウドの構築 ᵒ 誰が使⽤用するのか、どのようなシステムが動くのかの決定 ᵒ その後、採⽤用する技術の決定 ᵒ
最初は、⼩小さい環境でテスト • クラウドOS(クラウド基盤ソフトウェア) ᵒ クラウドの根幹となる部分 ᵒ 管理理者、利利⽤用者に使いやすいセルフサービスポータルを提供 ᵒ アプリケーション、内部連携システム等にAPIを提供 ᵒ ハイパーバイザー、ストレージ、ネットワークを管理理
49.
ユーザー会主催勉強会 18回(平均100名参加) OSC等全国各地のイベントへ参加 9回 ⽇日本CloudStackユーザー会(JCSUG) ⽇日本CloudStackユーザー会は、⽇日本語による
CloudStack に関する情報 発信、情報共有を⾏行行い、CloudStack の普及および⼈人材育成に貢献します。 詳しくは、http://CloudStack.jp
50.
第15回 CloudStackユーザー会 in
札幌 9/13 (金) 18:00 – 20:00 (開場 17:30) 北海道大学学術会館第3会議室 定員 40名 申し込みはこちら http://atnd.org/events/42880
51.
Work better. Live
better.
Download








































![ITアーキテクトのためのOracle Cloud Platform設計・構築入門 [Oracle Cloud Days Tokyo 2016]](https://cdn.slidesharecdn.com/ss_thumbnails/oracleclouddays2016d1-k2itoraclecloudplatform-161122130842-thumbnail.jpg?width=640&height=640&fit=bounds)













![オラクルGO!話題の位置情報アプリをクラウドで簡単に作ってみる [Oracle Cloud Developer Day 2016]](https://cdn.slidesharecdn.com/ss_thumbnails/esocd3-2gopresentation-v2-161122132043-thumbnail.jpg?width=640&height=640&fit=bounds)





























































