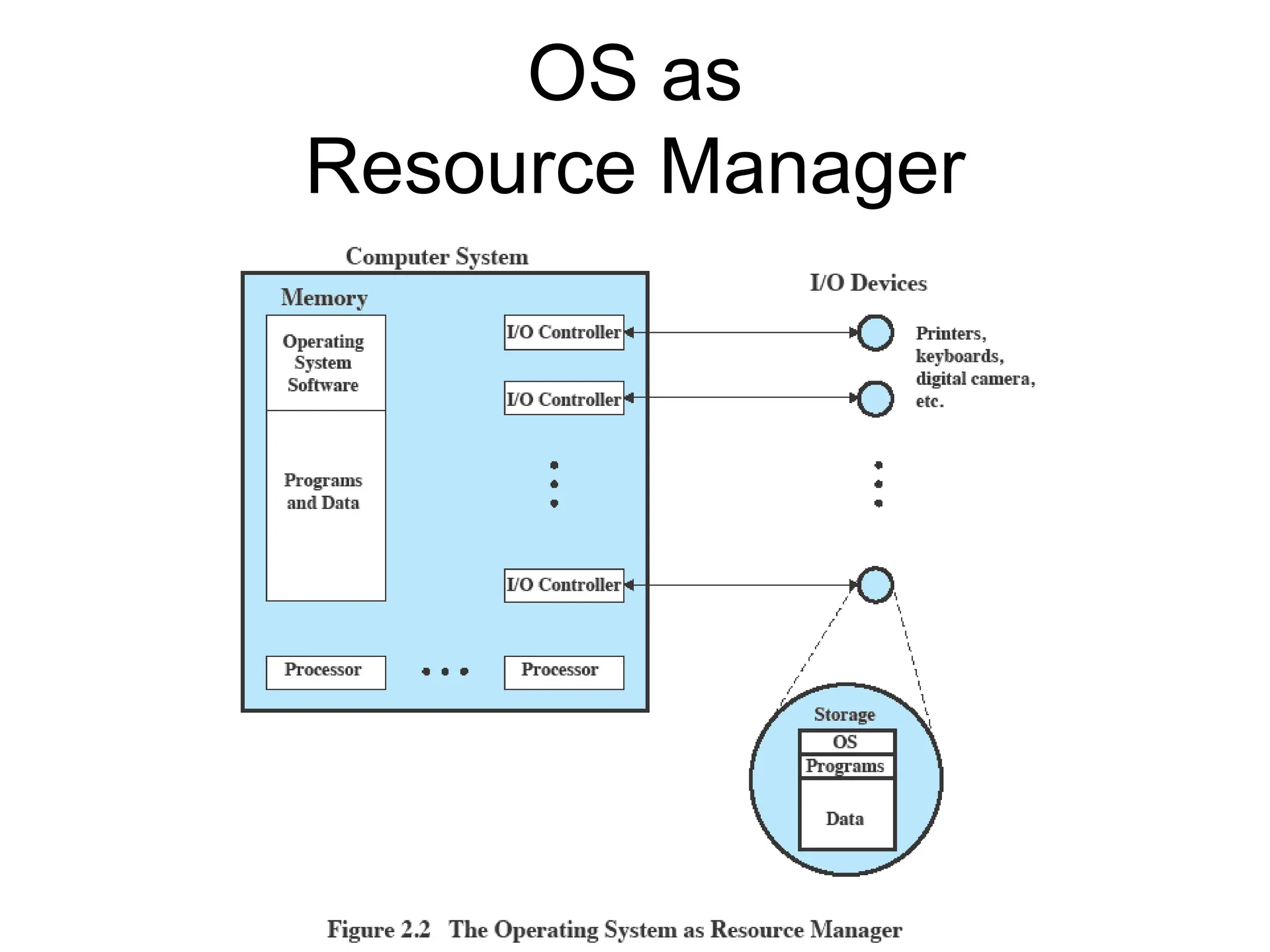
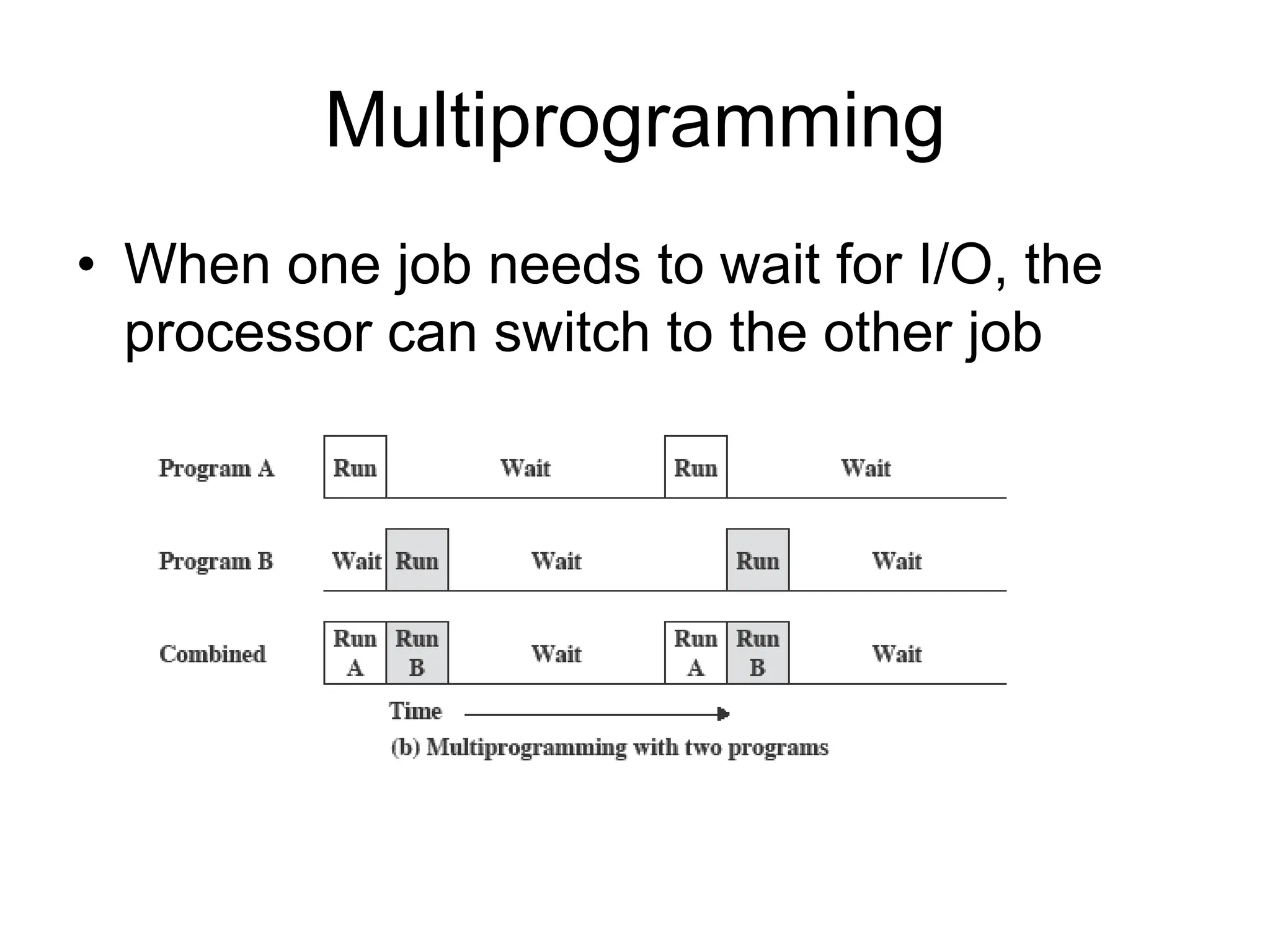
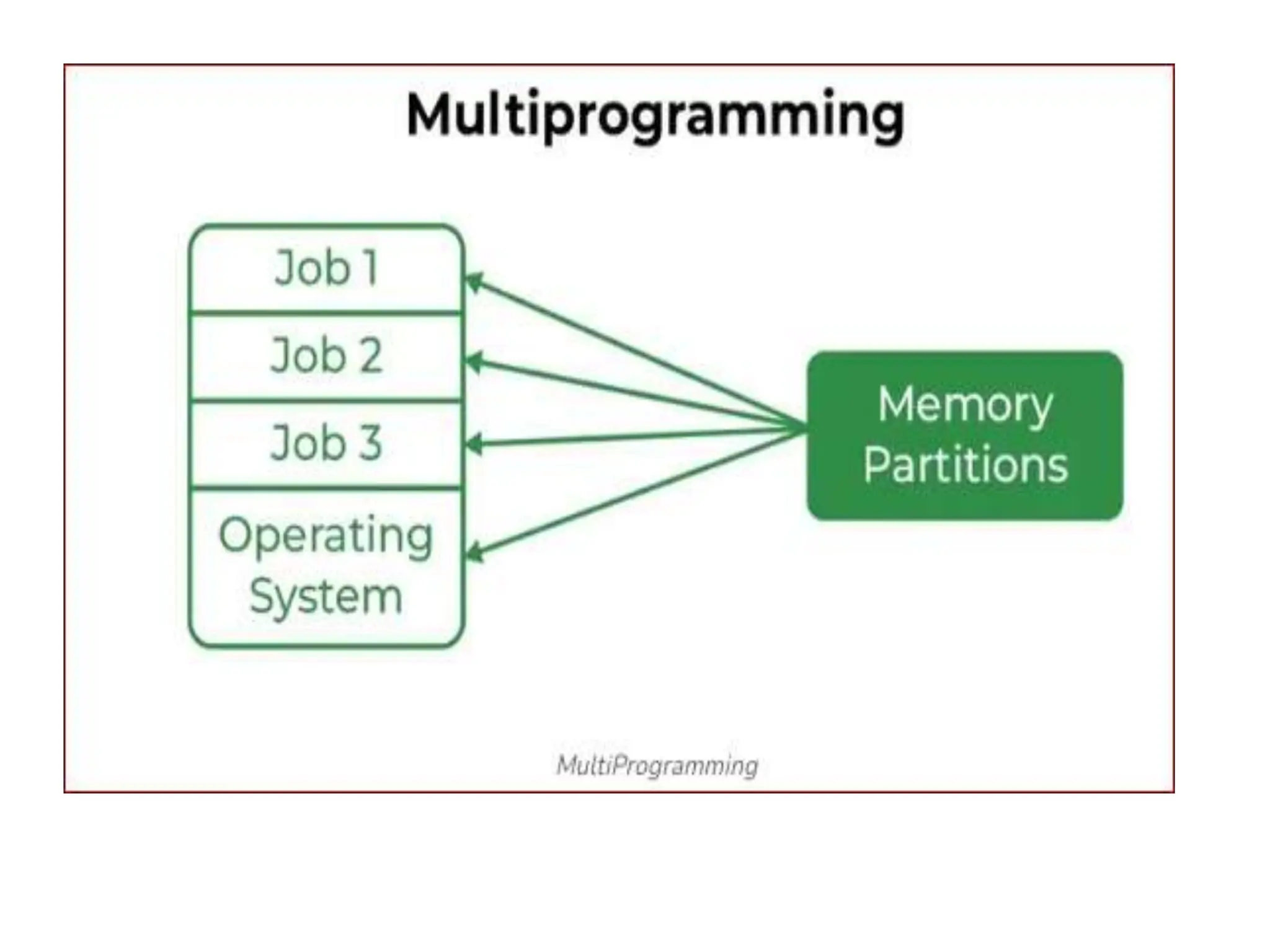
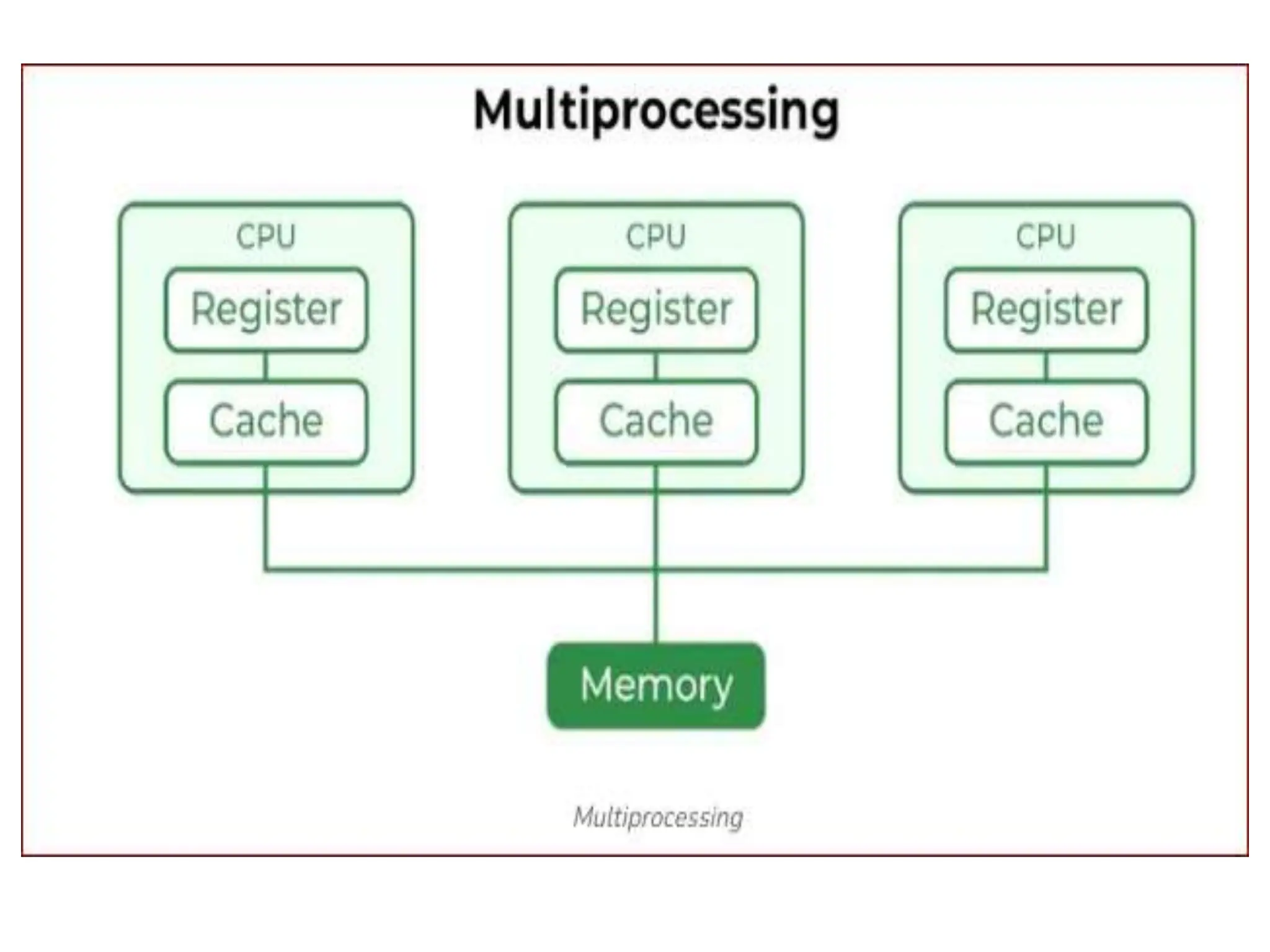
The document outlines the fundamentals of operating systems, including their objectives, functionalities, and evolution throughout history. It discusses various types of operating systems such as batch, multiprogramming, time-sharing, distributed, network, and real-time systems, along with their advantages and disadvantages. Additionally, it covers key design issues and specifics about Microsoft Windows and Unix systems.