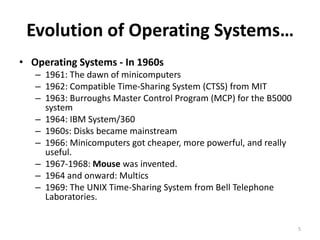
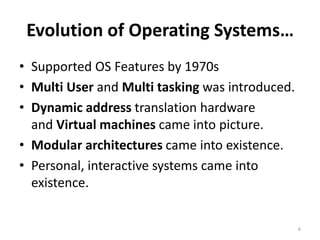
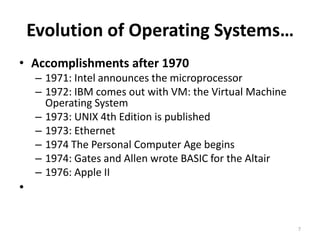
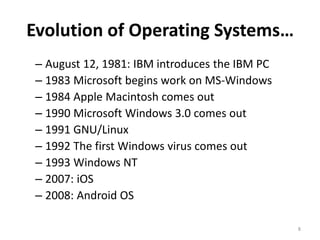
The document provides a comprehensive overview of the history and evolution of operating systems, starting from their inception in the 1950s with early batch processing systems to the development of advanced multi-user and real-time systems. It outlines significant milestones, various types of operating systems, their features, functionalities, and the critical roles they play in device and memory management. Additionally, it discusses the differences between firmware and operating systems, as well as various I/O processing methods and their implications on system processing efficiency.









































![제 23회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [MBOAX] : ABSA를 활용한 소비자 반응 분석 기반 운영 효율화 대시보드 설계](https://cdn.slidesharecdn.com/ss_thumbnails/3-1boaz23rdconferencemboax-260203102709-9d519923-thumbnail.jpg?width=640&height=640&fit=bounds)









