Downloaded 58 times
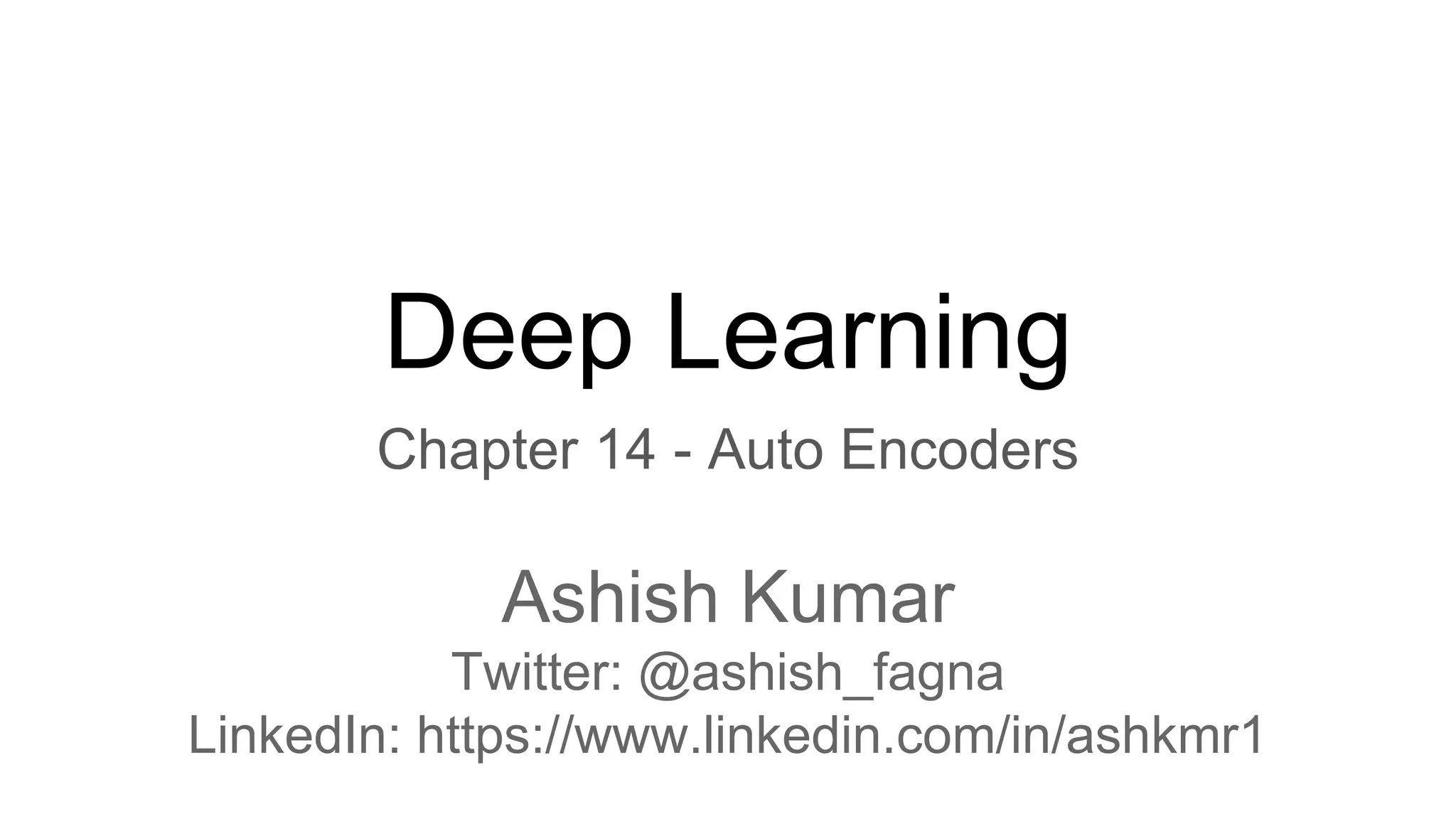

![14 Autoencoders
AE is neural network that is trained to attempt to copy its input to its output
It has a hidden layer [h] that encodes the input [x]. H = f(wx + bias) and also a
decoder
AE are restricted in ways that allow them to copy the inputs only approximately
and so it is forced to prioritize which aspects of the input should be copied which
can be great for feature extraction
AE traditionally used for dimensionality reduction or feature learning
AE can be considered a special case of feedforward networks and can be trained
with similar techniques - - MiniBatch GD. They’re also trained by recirculation](https://image.slidesharecdn.com/understandingautoencoderdeeplearningbook-chapter14-171119045347/85/Understanding-Autoencoder-Deep-Learning-Book-Chapter-14-5-320.jpg)
![14.1 Undercomplete Autoencoders
Undercomplete AE is one in which the dimension of Hidden layer [h] is less than
the dimensions of Input layer [x].
We are typically not interested in the AE output but the hidden layer [h]
[h] is typically constrained to smaller dimension than [x] which is called
Undercomplete. This forces an AE to capture only the salient features
If the AE is allowed too much capacity, then it just learn to copy the inputs with
extracting useful information about the distribution of the data](https://image.slidesharecdn.com/understandingautoencoderdeeplearningbook-chapter14-171119045347/85/Understanding-Autoencoder-Deep-Learning-Book-Chapter-14-6-320.jpg)
![14.2.2 Denoising Autoencoders
A denoising AE (DAE) is an AE that receives a corrupted input [x^hat ] and then try to
reconstruct the original inputs
We use a corruption process C ( x^hat | x) which represents a conditional distribution over
the corrupted samples x^hat given the original input [x]. The AE then learn a reconstruction
distribution p (x | x^hat) for training pairs (x | x^hat)
Typically, we can perform gradient based optimization and as long as the encoder is
deterministic, the denoising AE is a feed forward network and can be trained with the same
techniques as other similar networks
Denoising AE shows how useful byproducts emerge by just reducing the reconstruction
error. They also show how high capacity models may be used as autoencoders and still
learn useful features without learning the identity function](https://image.slidesharecdn.com/understandingautoencoderdeeplearningbook-chapter14-171119045347/85/Understanding-Autoencoder-Deep-Learning-Book-Chapter-14-9-320.jpg)
![14.2.3 Regularizing by Penalizing Derivatives
Another strategy for regularizing autoencoders is to use a penalty gamma, as in
sparse autoencoders but with a different form .
This forces the model to be invariant to slight changes in the input vector [x]. Since
this is only applies to training examples, it forces the AE to capture useful
information about the training distribution
This is called a contractive AE](https://image.slidesharecdn.com/understandingautoencoderdeeplearningbook-chapter14-171119045347/85/Understanding-Autoencoder-Deep-Learning-Book-Chapter-14-10-320.jpg)
![14.3 Representational Power, Layer Size and Depth
AE are usually trained using single layer encoders and decoders but we can also
make the hidden layer [h] deep
Since the encoder and decoder are both feed forward networks, they both benefit
from deep architectures.
The major advantage of deep architectures for feed forward neural networks is
that they can represent an approximation of any function to an arbitrary degree of
accuracy
A deep encoder can also approximate any mapping from the input [x] to hidden
layer [h] given enough hidden units. Depth exponentially reduces training cost and
amount of training data needed and achieves better compression.](https://image.slidesharecdn.com/understandingautoencoderdeeplearningbook-chapter14-171119045347/85/Understanding-Autoencoder-Deep-Learning-Book-Chapter-14-11-320.jpg)
![14.5.1 Estimating the Score
Score matching is an alternative to maximum likelihood and provides an
alternative to probability distribution by encouraging the model to have the same
score as the data distribution at every training point in [x]
For AEs, learning the gradient field is one way of learning the structure of p(data)
Denoising training of a specific kind of AE (sigmoid hidden units , linear
reconstruction units) is equivalent to training an RBM (restricted Boltzmann
machine , basic neural network) with Gaussian visible units .](https://image.slidesharecdn.com/understandingautoencoderdeeplearningbook-chapter14-171119045347/85/Understanding-Autoencoder-Deep-Learning-Book-Chapter-14-13-320.jpg)
![14.6 Learning Manifolds with Autoencoders
Most learning algorithms including AE exploit the idea that data concentrates around a
low dimension manifold or learning surface. AEs aims to learn the structure of this
manifold
All AE training procedure involve a compromise between two forces
- Learning a representation [h] of a training example [x] such that [x] can be
reconstructed via [h] through a decoder
- Satisfying the constraint of regularization penalty. This is usually an architectural
constraint that limits the capacity of the AE These technique prefer methods that
are less sensitive to the input
The two forces force the hidden representation to capture information about the
structure of the data generating distribution](https://image.slidesharecdn.com/understandingautoencoderdeeplearningbook-chapter14-171119045347/85/Understanding-Autoencoder-Deep-Learning-Book-Chapter-14-16-320.jpg)
![14.6 Learning Manifolds with Autoencoders
The AE can afford to represent only the variations needed for reconstruction
The manifold captures a local coordinate system if the generating distribution
concentrates near a low dimensional manifold. Hence the encoder learns a
mapping from [x] to representative space that is only sensitive to changes along
the manifold and not changes orthogonal to the manifold.
The AE recovers the manifold structure if the reconstruction function is insensitive
to the perturbation in the input -see example
Most of the ML research of learning nonlinear manifolds has focused on non
parametric methods based on the nearest-neighbour graph](https://image.slidesharecdn.com/understandingautoencoderdeeplearningbook-chapter14-171119045347/85/Understanding-Autoencoder-Deep-Learning-Book-Chapter-14-17-320.jpg)
![14.7 Contractive Autoencoders
The contractive AE introduces a regularizer on the [h] , the hidden layer
There is a connection between Denoising AE and Contractive AE. In the limit of
small Gaussian input noise the denoising reconstruction error is equivalent to the
contractive penalty on the reconstruction function.
That is Denoising AEs make the reconstruction function resist small but finite
perturbations of the input while contractive AEs make the feature extraction
function resist small perturbations to the input
The CAE maps a neighborhood of input points to smaller neighborhood of output
points,hence contracting the input.](https://image.slidesharecdn.com/understandingautoencoderdeeplearningbook-chapter14-171119045347/85/Understanding-Autoencoder-Deep-Learning-Book-Chapter-14-19-320.jpg)
![14.7 Contractive Autoencoders
Regularized AE learn manifolds by balancing opposing forces. For CAEs these
are reconstruction error and the contractive penalty. Reconstruction error alone
would allow the CAE to learn an identity function and contractive penalty alone will
allow the CAE to learn features that are constant wrt [x]
A good strategy to train AEs is to train a series of single layer AEs each trained to
reconstruct the previous AEs hidden layer. The composition of these AEs forms
a deep AE. Because each layer was separately trained to be contractive , the
deep AE is contractive as well which is different from training the full AE with
penalty
The contractive penalty can also obtain useless results unless corrective action is
taken](https://image.slidesharecdn.com/understandingautoencoderdeeplearningbook-chapter14-171119045347/85/Understanding-Autoencoder-Deep-Learning-Book-Chapter-14-20-320.jpg)
![14.8 Predictive Sparse Decomposition
PSD is hybrid model of sparse coding and parametric AE. A parametric AE is
trained to predict the output of iterative inference and have been applied to
unsupervised feature learning for object recognition in images/ video and audio
PSD consists an encoder / decoder which are both parametric.
The training algorithm alternates between minimizing wrt [h] and minimizing wrt to
the model parameters
PSD regularizes the decoder to use parameters for f(x) can infer good values
For PSD the parametric encoder [f] is used to compute the learned features when
the model is deployed. Evaluating [f] is computationally inexpensive vs inferring [h]
via gradient descent. PSDs can be stacked and used to initialize a deep network](https://image.slidesharecdn.com/understandingautoencoderdeeplearningbook-chapter14-171119045347/85/Understanding-Autoencoder-Deep-Learning-Book-Chapter-14-21-320.jpg)
![14.9 Applications of Autoencoders
AE have successfully applied to recommendation systems, dimensionality
reduction and information retrieval.
The learned representation in [h] were qualitatively easier to interpret and relate to
the underlying categories, with those categories manifesting as clusters
Lower dimensional representation can improve performance on classification tasks
since they consume less memory cheaper to run
One task that benefits greatly from dimensionality reduction is information retrieval
since search can become extremely efficient in low dimension spaces.](https://image.slidesharecdn.com/understandingautoencoderdeeplearningbook-chapter14-171119045347/85/Understanding-Autoencoder-Deep-Learning-Book-Chapter-14-22-320.jpg)
![14.9 Applications of Autoencoders
We can use DR (dimensional reduction) to produce [h] that is low dimension and
binary and then store the entries in database mapping binary code vectors to
entries (lookup)
Searching of the hash table is very efficient. This approach to IR (Information
Retrieval) via DM (data mining) and binarization is called semantic hashing.
To produce binary codes for semantic hashing, we typically use an encoder with
sigmoids (as activation function) on the final layer.](https://image.slidesharecdn.com/understandingautoencoderdeeplearningbook-chapter14-171119045347/85/Understanding-Autoencoder-Deep-Learning-Book-Chapter-14-23-320.jpg)

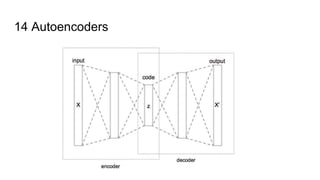
Deep Learning Chapter 14 discusses autoencoders. Autoencoders are neural networks trained to copy their input to their output. They have an encoder that maps the input to a hidden representation and a decoder that maps this back to the output. Autoencoders are commonly used for dimensionality reduction, feature learning, and extracting a low-dimensional representation of the input data. Regularized autoencoders add constraints like sparsity or contractive penalties to prevent the autoencoder from learning the identity function and force it to learn meaningful representations. Denoising autoencoders are trained to reconstruct clean inputs from corrupted versions, which encourages the hidden representation to be robust. Contractive autoencoders add a penalty term that resists small changes to the input


































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)
