Download as PDF, PPTX





![What is your
Favourite Italian Food?
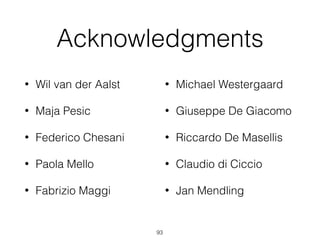
UnderstandingSpaghettiModelswithSequenceClusteringforProM9
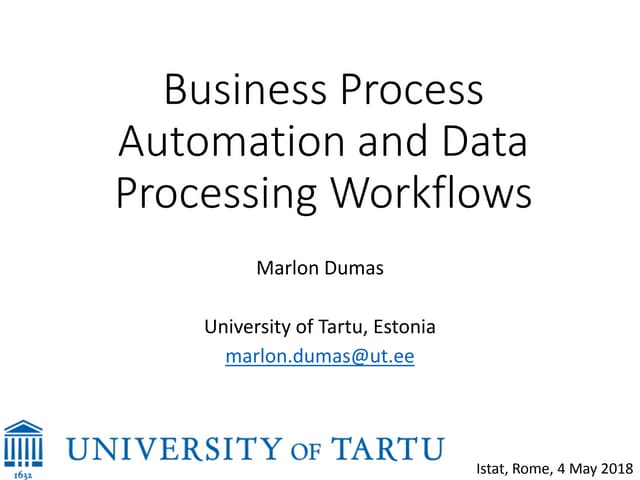
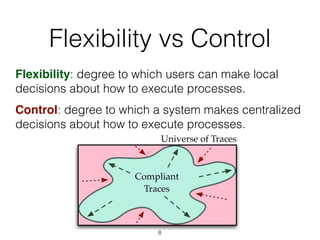
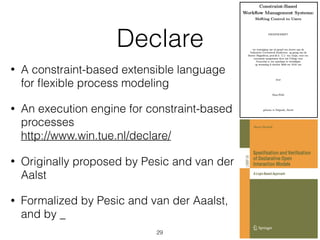
thoseexceptions.Figure4depictstheresultofafirstattempttoanalyzethe
applicationserverlogsusingtheheuristicsminer[4].
Exception
(complete)
187
EstabelecimentoNotFoundException
(complete)
187
0,991
152
GREJBPersistencyException
(complete)
179
0,909
159
PGWSException
(complete)
168
0,889
12
ITPTExternalServiceException
(complete)
183
0,944
162
SIPSCNoRecordsFoundException
(complete)
160
0,8
5
PessoaSingularNotFoundException
(complete)
138
0,667
3
BusinessLogicException
(complete)
183
0,75
4
SICCLException
(complete)
175
0,857
19
NaoExistemRegistosException
(complete)
143
0,833
6
RPCBusinessException
(complete)
38
0,75
3
SAFBusinessException
(complete)
115
0,8
68
GREJBBusinessException
(complete)
45
0,75
23
DESWSException
(complete)
14
0,667
14
NullPointerException
(complete)
104
0,8
91
ValidationException
(complete)
31
0,8
12
GILBusinessException
(complete)
14
0,5
6
GRServicesException
(complete)
7
0,667
3
CSIBusinessException
(complete)
14
0,5
6
ConcorrenciaException
(complete)
5
0,5
2
CSIPersistencyException
(complete)
3
0,5
2
0,857
34
ITPTServerException
(complete)
21
0,667
15
COOPException
(complete)
4
0,5
2
RSIValidationException
(complete)
25
0,667
18
BasicSystemException
(complete)
16
0,667
11
PesquisaAmbiguaException
(complete)
6
0,5
6
CPFBusinessException
(complete)
3
0,5
2
0,8
95
ADOPException
(complete)
6
0,5
5
AFBusinessException
(complete)
64
SIPSCRemoteBusinessException
(complete)
51
0,833
13
ConcurrentModificationException
(complete)
5
0,5
1
CDFBusinessException
(complete)
6
0,667
2
AssinaturaNaoIncluidaException
(complete)
1
0,5
1
SICCSException
(complete)
32
0,8
11
CartaoCidadaoException
(complete)
64
0,833
38
SOAPException
(complete)
22
0,667
14
TooManyRowsException
(complete)
112
0,667
18
SIPSCFatalException
(complete)
20
0,667
9
LimiteTemporalException
(complete)
4
0,5
2
0,8
28
SVIBusinessUserException
(complete)
18
0,75
12
GRConcurrencyException
(complete)
8
0,5
2
ContribuinteRegionalNotFoundException
(complete)
63
0,75
30
JDOFatalUserException
(complete)
124
0,947
49
0,667
5
SQLException
(complete)
9
0,667
7
IOException
(complete)
27
0,75
22
PessoaColectivaNotFoundException
(complete)
23
0,75
20
ServiceDelegateRemoteException
(complete)
3
0,5
2
0,5
5
PASException
(complete)
2
0,5
1
FileNotFoundException
(complete)
31
0,75
13
QgenMIParametrizedBusinessException
(complete)
1
0,5
1
ADOPMessageException
(complete)
3
0,5
2
LayoffException
(complete)
1
0,5
1
0,75
8
CMPException
(complete)
1
0,5
1
GREJBRemoteServiceException
(complete)
34
0,75
4
RSIPersistenceException
(complete)
24
0,75
4
CSIRemoteException
(complete)
3
0,5
1
SIPSCFatalRemoteCallException
(complete)
3
0,5
1
SIPSCDatabaseException
(complete)
1
0,5
1
BusinessException
(complete)
159
0,667
9
SVIBusinessException
(complete)
1
0,5
1
ParametrizedBusinessException
(complete)
2
0,5
2
GDServicesException
(complete)
4
0,5
3
ServerException
(complete)
132
0,75
16
PGException
(complete)
6
0,667
5
0,75
4
DESException
(complete)
135
0,667
13
0,667
2
0,75
9
SIPSCException
(complete)
27
0,75
9
ReportException
(complete)
5
0,667
2
SSNServiceException
(complete)
1
0,5
1
AFException
(complete)
1
0,5
1
InvalidNISSException
(complete)
14
0,75
4
0,75
14
GILConcurrencyException
(complete)
1
0,5
1
RSISystemException
(complete)
28
0,75
7
0,667
5
0,667
1
0,75
2
0,667
5
0,833
5
0,667
5
0,667
4
0,75
12
0,981
53
ADOPUserChoiceException
(complete)
1
0,5
1
0,667
5
RPCException
(complete)
1
0,5
1
GREJBConcurrencyException
(complete)
15
0,875
8
0,5
1
0,5
1
0,667
1
MoradaPortuguesaNotFoundException
(complete)
1
0,5
1
0,75
4
0,5
1
0,667
6
0,5
1
0,5
2
0,889
8
0,75
3
0,8
3
RSIException
(complete)
1
0,5
1
0,5
1
0,5
1
0,667
4
0,667
3
0,5
1
0,5
2
0,75
5
0,5
1
0,5
1
0,5
2
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,8
1
0,5
1
0,5
1
0,5
1
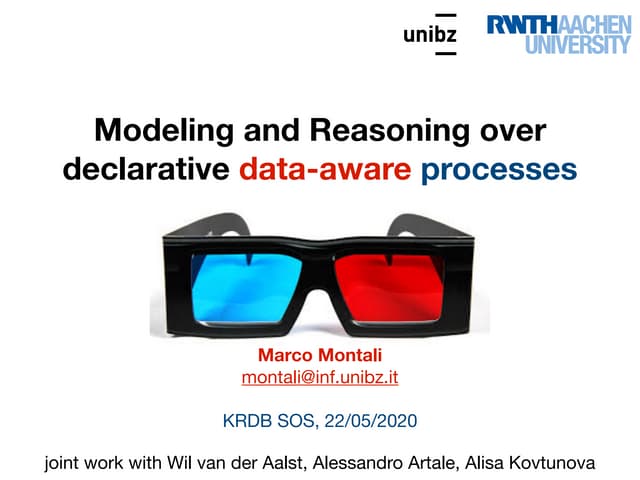
Fig.4.Spaghettimodelobtainedfromtheapplicationserverlogsusingtheheuristics
miner.
Usingthesequenceclusteringplug-inanditspreprocessingcapabilities,as
wellasthepossibilityofvisuallyadjustingtheclustermodelsaccordingtocertain
Healthcare
21](https://image.slidesharecdn.com/fmai-2017-montali-declare-170222152331/85/Temporal-logics-over-finite-traces-for-declarative-BPM-21-320.jpg)
![What is your
Favourite Italian Food?
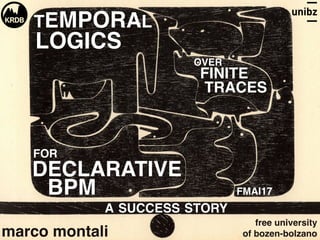
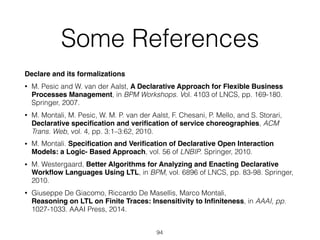
UnderstandingSpaghettiModelswithSequenceClusteringforProM9
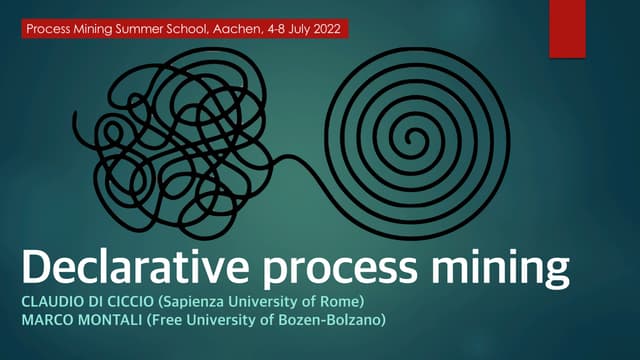
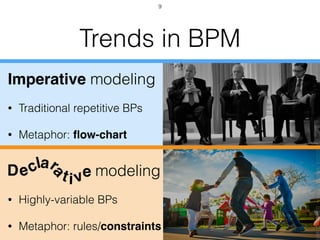
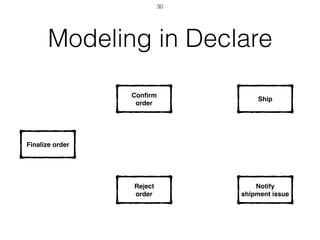
thoseexceptions.Figure4depictstheresultofafirstattempttoanalyzethe
applicationserverlogsusingtheheuristicsminer[4].
Exception
(complete)
187
EstabelecimentoNotFoundException
(complete)
187
0,991
152
GREJBPersistencyException
(complete)
179
0,909
159
PGWSException
(complete)
168
0,889
12
ITPTExternalServiceException
(complete)
183
0,944
162
SIPSCNoRecordsFoundException
(complete)
160
0,8
5
PessoaSingularNotFoundException
(complete)
138
0,667
3
BusinessLogicException
(complete)
183
0,75
4
SICCLException
(complete)
175
0,857
19
NaoExistemRegistosException
(complete)
143
0,833
6
RPCBusinessException
(complete)
38
0,75
3
SAFBusinessException
(complete)
115
0,8
68
GREJBBusinessException
(complete)
45
0,75
23
DESWSException
(complete)
14
0,667
14
NullPointerException
(complete)
104
0,8
91
ValidationException
(complete)
31
0,8
12
GILBusinessException
(complete)
14
0,5
6
GRServicesException
(complete)
7
0,667
3
CSIBusinessException
(complete)
14
0,5
6
ConcorrenciaException
(complete)
5
0,5
2
CSIPersistencyException
(complete)
3
0,5
2
0,857
34
ITPTServerException
(complete)
21
0,667
15
COOPException
(complete)
4
0,5
2
RSIValidationException
(complete)
25
0,667
18
BasicSystemException
(complete)
16
0,667
11
PesquisaAmbiguaException
(complete)
6
0,5
6
CPFBusinessException
(complete)
3
0,5
2
0,8
95
ADOPException
(complete)
6
0,5
5
AFBusinessException
(complete)
64
SIPSCRemoteBusinessException
(complete)
51
0,833
13
ConcurrentModificationException
(complete)
5
0,5
1
CDFBusinessException
(complete)
6
0,667
2
AssinaturaNaoIncluidaException
(complete)
1
0,5
1
SICCSException
(complete)
32
0,8
11
CartaoCidadaoException
(complete)
64
0,833
38
SOAPException
(complete)
22
0,667
14
TooManyRowsException
(complete)
112
0,667
18
SIPSCFatalException
(complete)
20
0,667
9
LimiteTemporalException
(complete)
4
0,5
2
0,8
28
SVIBusinessUserException
(complete)
18
0,75
12
GRConcurrencyException
(complete)
8
0,5
2
ContribuinteRegionalNotFoundException
(complete)
63
0,75
30
JDOFatalUserException
(complete)
124
0,947
49
0,667
5
SQLException
(complete)
9
0,667
7
IOException
(complete)
27
0,75
22
PessoaColectivaNotFoundException
(complete)
23
0,75
20
ServiceDelegateRemoteException
(complete)
3
0,5
2
0,5
5
PASException
(complete)
2
0,5
1
FileNotFoundException
(complete)
31
0,75
13
QgenMIParametrizedBusinessException
(complete)
1
0,5
1
ADOPMessageException
(complete)
3
0,5
2
LayoffException
(complete)
1
0,5
1
0,75
8
CMPException
(complete)
1
0,5
1
GREJBRemoteServiceException
(complete)
34
0,75
4
RSIPersistenceException
(complete)
24
0,75
4
CSIRemoteException
(complete)
3
0,5
1
SIPSCFatalRemoteCallException
(complete)
3
0,5
1
SIPSCDatabaseException
(complete)
1
0,5
1
BusinessException
(complete)
159
0,667
9
SVIBusinessException
(complete)
1
0,5
1
ParametrizedBusinessException
(complete)
2
0,5
2
GDServicesException
(complete)
4
0,5
3
ServerException
(complete)
132
0,75
16
PGException
(complete)
6
0,667
5
0,75
4
DESException
(complete)
135
0,667
13
0,667
2
0,75
9
SIPSCException
(complete)
27
0,75
9
ReportException
(complete)
5
0,667
2
SSNServiceException
(complete)
1
0,5
1
AFException
(complete)
1
0,5
1
InvalidNISSException
(complete)
14
0,75
4
0,75
14
GILConcurrencyException
(complete)
1
0,5
1
RSISystemException
(complete)
28
0,75
7
0,667
5
0,667
1
0,75
2
0,667
5
0,833
5
0,667
5
0,667
4
0,75
12
0,981
53
ADOPUserChoiceException
(complete)
1
0,5
1
0,667
5
RPCException
(complete)
1
0,5
1
GREJBConcurrencyException
(complete)
15
0,875
8
0,5
1
0,5
1
0,667
1
MoradaPortuguesaNotFoundException
(complete)
1
0,5
1
0,75
4
0,5
1
0,667
6
0,5
1
0,5
2
0,889
8
0,75
3
0,8
3
RSIException
(complete)
1
0,5
1
0,5
1
0,5
1
0,667
4
0,667
3
0,5
1
0,5
2
0,75
5
0,5
1
0,5
1
0,5
2
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,5
1
0,8
1
0,5
1
0,5
1
0,5
1
Fig.4.Spaghettimodelobtainedfromtheapplicationserverlogsusingtheheuristics
miner.
Usingthesequenceclusteringplug-inanditspreprocessingcapabilities,as
wellasthepossibilityofvisuallyadjustingtheclustermodelsaccordingtocertain
Healthcare
22](https://image.slidesharecdn.com/fmai-2017-montali-declare-170222152331/85/Temporal-logics-over-finite-traces-for-declarative-BPM-22-320.jpg)

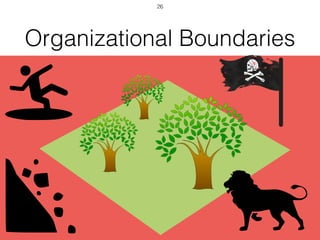

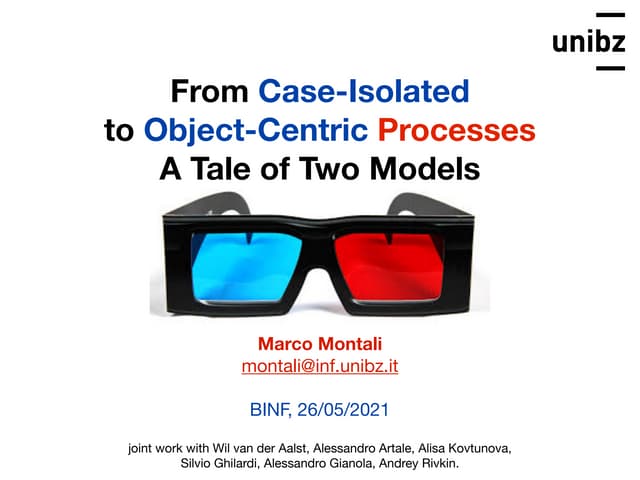
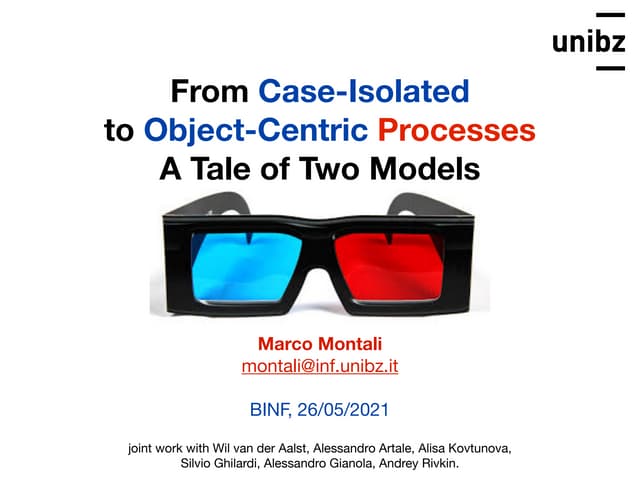
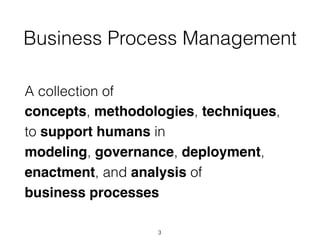
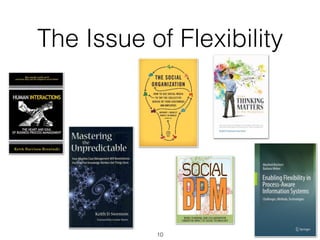
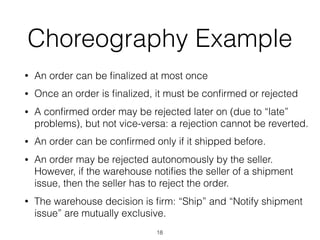
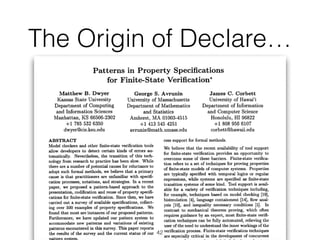
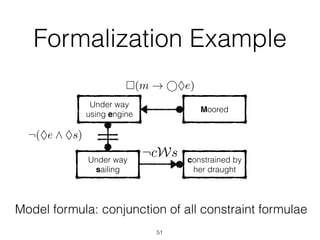
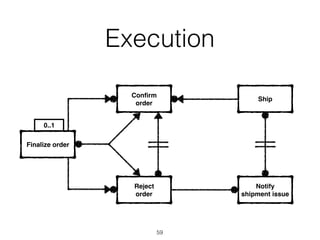
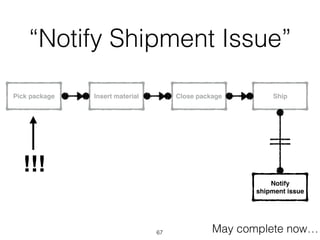
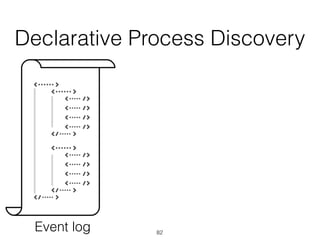
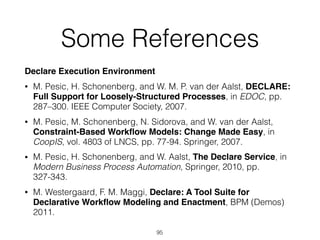
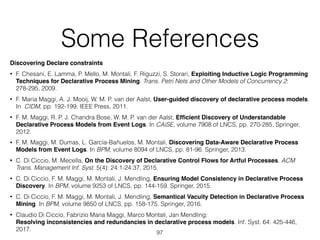
![Choice Constraints
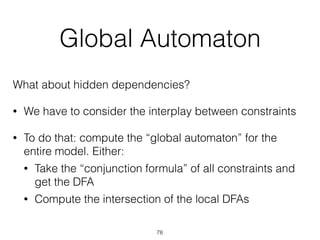
3.3 Constraints 51
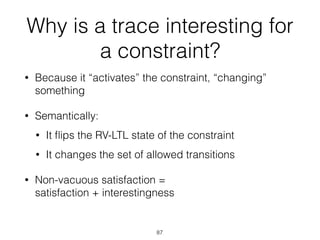
Table 3.2. ConDec choice constraints
name graphical meaning
choice(n of m,[a1,...,am])
a1
am
a2
n of m
...
At least n distinct activities
among a1,. . . ,am must be exe-
cuted
ex choice(n of m,[a1,...,am])
a1
am
a2
n of m
...
Exactly n distinct activities
among a1,. . . ,am must be exe-
cuted
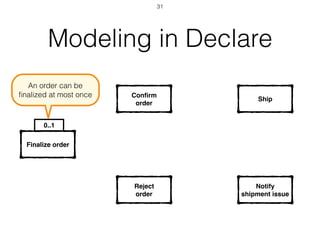
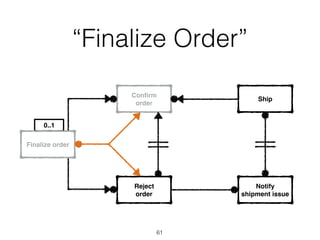
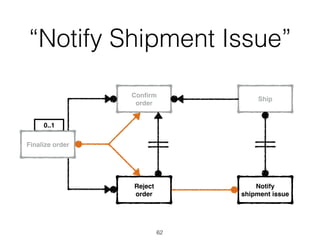
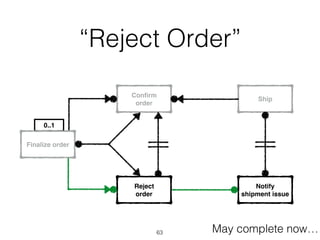
Note that the constraint supports an execution trace containing three submis-
sions of the paper (via e-mail and/or by using the web site), while it evaluates
a trace without submissions as noncompliant.
A 1 of 2-exclusive choice can be instead adopted to model the existence
between two alternatives that exclude each other. For example, it could be
used to state that, within an instance of the system, the customer commits
herself to cancel or successfully close the order, but not both:
Examples:
choice(n of m,[a1,...,am])
a1
am
a2
n of m
...
At least n distinct activitie
among a1,. . . ,am must be exe
cuted
x choice(n of m,[a1,...,am])
a1
am
a2
n of m
...
Exactly n distinct activitie
among a1,. . . ,am must be exe
cuted
ote that the constraint supports an execution trace containing three submis
ons of the paper (via e-mail and/or by using the web site), while it evaluate
trace without submissions as noncompliant.
A 1 of 2-exclusive choice can be instead adopted to model the existenc
etween two alternatives that exclude each other. For example, it could b
sed to state that, within an instance of the system, the customer commit
erself to cancel or successfully close the order, but not both:
cancel order −− −− close order
It is worth noting that choice constraints, together with the existence38](https://image.slidesharecdn.com/fmai-2017-montali-declare-170222152331/85/Temporal-logics-over-finite-traces-for-declarative-BPM-38-320.jpg)
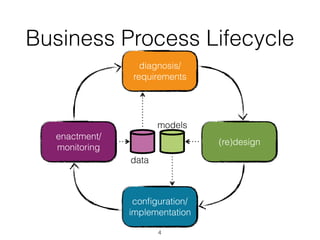
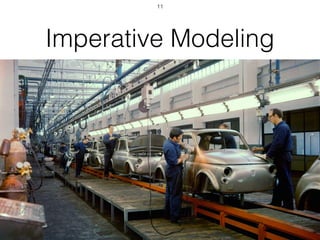
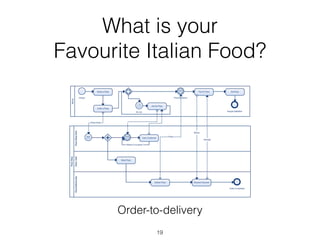
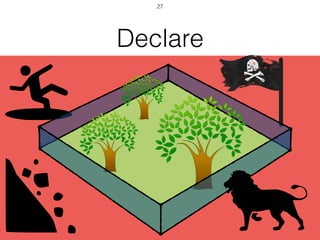
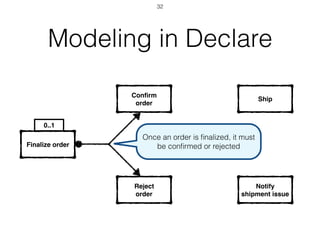
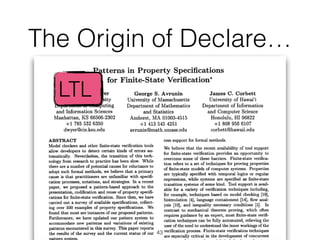
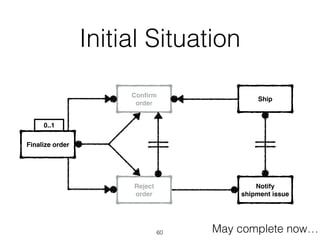
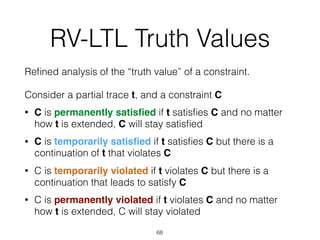
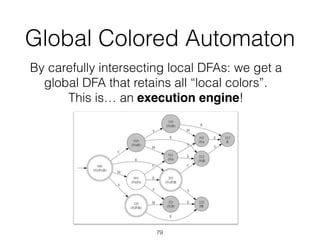
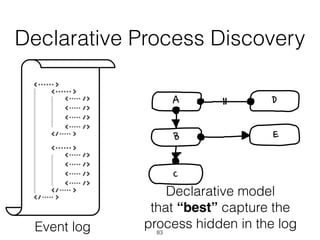
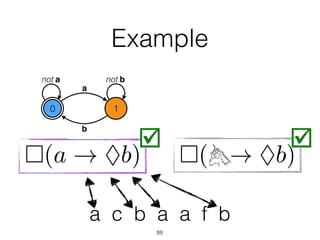
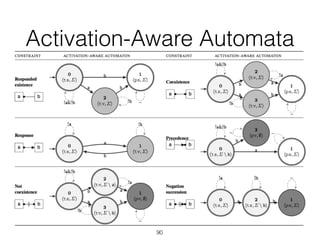
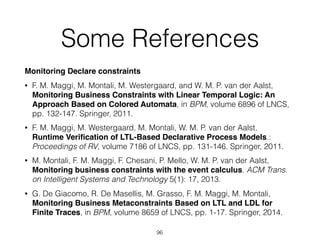
![name graphical meaning
resp existence([a], [b]) a •−−−− b
If a is executed, then b must be exe-
cuted before or after a
coexistence([a],[b]) a •−−−• b
Neither a nor b is executed, or they
are both executed
response([a],[b]) a •−−− b
If a is executed, then b must be exe-
cuted thereafter
precedence([a],[b]) a −−− • b
b can be executed only if a has been
previously executed
succession([a],[b]) a •−− • b
a and b must be executed in succes-
sion, i.e. b must follow a and a must
precede b
alt response([a],[b]) a •=== b
b is response of a and between every
two executions of a, b must be exe-
cuted at least once
alt precedence([a],[b]) a === • b
a is precedence of b and between ev-
ery two executions of b, a must be
executed at least once
alt succession([a],[b]) a •== • b
b is alternate response of a, and a is
alternate precedence of b
chain response([a],[b]) a •=−=−=− b
If a is executed, then b must be exe-
cuted next (immediately after a)
chain precedence([a],[b]) a =−=−=− • b
If b is executed, then a must have
been executed immediately before b
chain succession([a],[b]) a •=−=− • b
a and b must be executed in sequence
(next to each other)
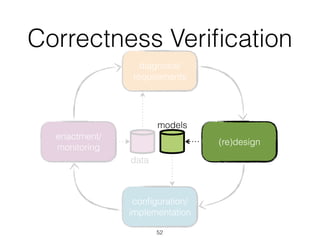
RelationConstraints
39](https://image.slidesharecdn.com/fmai-2017-montali-declare-170222152331/85/Temporal-logics-over-finite-traces-for-declarative-BPM-39-320.jpg)
![NegationConstraints
Table 3.4. ConDec negation constraints
name graphical meaning
resp absence([a],[b]) a •−−−−∥ b
If a is executed, then b can never
be executed
not coexistence([a],[b]) a •−−−•∥ b a and b exclude each other
neg response([a],[b]) a •−−−∥ b b cannot be executed after a
neg precedence([a],[b]) a −−− •∥ b a cannot be executed before b
neg succession([a],[b]) a •−− •∥ b
a and b cannot be executed in
succession
neg alt response([a],[b]) a •===∥ b
b cannot be executed between
any two occurrences of a
neg alt precedence([a],[b]) a === •∥ b
a cannot be executed between
any two bs
neg alt succession([a],[b]) a •== •∥ b
b cannot be executed between
any two as and viceversa
neg chain response([a],[b]) a •=−=−=−∥ b b cannot be executed next to a
neg chain precedence([a],[b]) a =−=−=− •∥ b
a cannot be executed immedi-
ately before b
neg chain succession([a],[b]) a •=−=− •∥ b
a and b cannot be executed in
sequence
40](https://image.slidesharecdn.com/fmai-2017-montali-declare-170222152331/85/Temporal-logics-over-finite-traces-for-declarative-BPM-40-320.jpg)

![Linear Dynamic Logic
over Finite Traces
69
The Logic ldlf [De Giacomo&Vardi,IJCAI13]
Merges ltlf with regular expressions, through the syntax of Propositional
Dynamic Logic (PDL):
Ï ::= „ | tt | | ¬Ï | Ï1 · Ï2 | ÈflÍÏ | [fl]Ï
fl ::= „ | Ï? | fl1 + fl2 | fl1; fl2 | flú
Ï: ltlf part; fl: regular expression part.
They mutually refer to each other:
• ÈflÍÏ states that, from the current step in the trace, there is an
execution satisfying fl such that its last step satisfies Ï.
• [fl]Ï states that, from the current step in the trace, all execution
satisfying fl are such that their last step satisfies Ï.
• Ï? checks whether Ï is true in the current step and, if so, continues
to evaluate the remaining execution.
Of special interest is end = [true?] , to check whether the trace has been](https://image.slidesharecdn.com/fmai-2017-montali-declare-170222152331/85/Temporal-logics-over-finite-traces-for-declarative-BPM-69-320.jpg)
![Automata for LDLf
70
From ldlf to nfa
Direct calculation of nfa corresponding to ldlf formula Ï
Algorithm
1: algorithm ldlf 2nfa()
2: input ltlf formula Ï
3: output nfa AÏ = (2P
, S, {s0}, Í, {sf })
4: s0 Ω {"Ï"} Û single initial state
5: sf Ω ÿ Û single final state
6: S Ω {s0, sf }, Í Ω ÿ
7: while (S or Í change) do
8: if (q œ S and qÕ
|=
w
("Â"œq) ”("Â", ))
9: S Ω S fi {qÕ
} Û update set of states
10: Í Ω Í fi {(q, , qÕ
)} Û update transition relation
Note
• Standard nfa.
• No detour to Büchi automata.
• Easy to code.
• Implemented!
Auxiliary rules
”("tt", ) = true
”(" ", ) = false
”("„", ) =
I
true if |= „
false if ”|= „
(„ propositional)
”("Ï1 · Ï2", ) = ”("Ï1", ) · ”("Ï2", )
”("Ï1 ‚ Ï2", ) = ”("Ï1", ) ‚ ”("Ï2", )
”("È„ÍÏ", ) =
Y
_]
_[
"Ï" if last ”œ and |= „ („ propositional)
”("Ï", ‘) if last œ and |= „
false if ”|= „
”("ÈÂ?ÍÏ", ) = ”("Â", ) · ”("Ï", )
”("Èfl1 + fl2ÍÏ", ) = ”("Èfl1ÍÏ", ) ‚ ”("Èfl2ÍÏ", )
”("Èfl1; fl2ÍÏ", ) = ”("Èfl1ÍÈfl2ÍÏ", )
”("Èflú
ÍÏ", ) =
I
”("Ï", ) if fl is test-only
”("Ï", ) ‚ ”("ÈflÍÈflúÍÏ", ) o/w
”("[„]Ï", ) =
Y
_]
_[
"Ï" if last ”œ and |= „ („ propositional)
”("Ï", ‘) if last œ and |= „ („ propositional)
true if ”|= „
”("[Â?]Ï", ) = ”("nnf (¬Â)", ) ‚ ”("Ï", )
”("[fl1 + fl2]Ï", ) = ”("[fl1]Ï", ) · ”("[fl2]Ï", )
”("[fl1; fl2]Ï", ) = ”("[fl1][fl2]Ï", )
”("[flú
]Ï", ) =
I
”("Ï", ) if fl is test-only
”("Ï", ) · ”("[fl][flú]Ï", ) o/w
Marco Montali (unibz) Monitoring Business Metaconstraints BPM 2014 22 / 26](https://image.slidesharecdn.com/fmai-2017-montali-declare-170222152331/85/Temporal-logics-over-finite-traces-for-declarative-BPM-70-320.jpg)
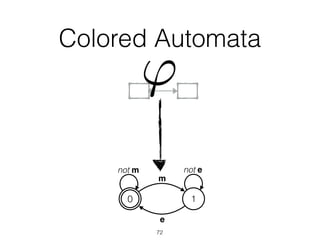
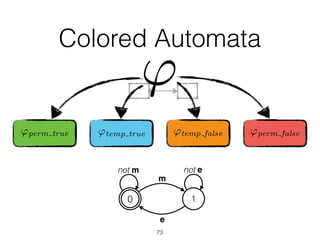
![Black Magic with LDLf
71
Runtime ldlf Monitors
Check partial trace fi = e1, . . . , en against formula Ï.
From ad-hoc techniques . . .
e1 . . . en |=
C
Ï
D
RV =
Y
___]
___[
temp_true
temp_false
true
false
. . . To standard techniques
e1 . . . en |=
Y
______]
______[
Ïtemp_true
Ïtemp_false
Ïtrue
Ïfalse
Marco Montali (unibz) Monitoring Business Metaconstraints BPM 2014 14 / 26](https://image.slidesharecdn.com/fmai-2017-montali-declare-170222152331/85/Temporal-logics-over-finite-traces-for-declarative-BPM-71-320.jpg)

The document discusses the principles and trends in Business Process Management (BPM), emphasizing the need for balancing flexibility and control in the execution of business processes. It outlines different BPM modeling approaches and highlights the significance of data, resources, and the business process lifecycle in achieving organizational goals. Furthermore, it touches on the complexities of handling exceptions in business processes, illustrated through practical examples.