Download to read offline



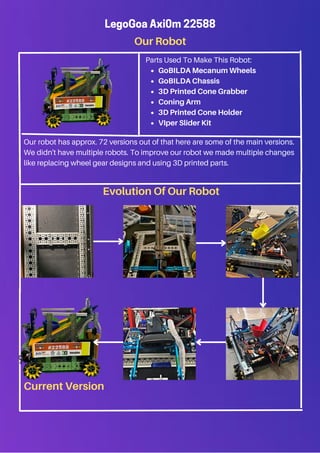




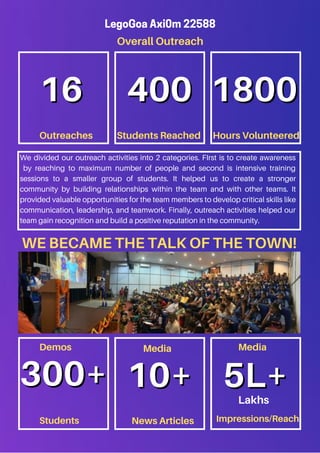






Team 22588, the first FTC team from Goa, consists of 14 students who aim to promote STEM through various outreach activities and competitions. They designed their robot, Legogoa Axi0m 22588, through multiple iterations, focusing on improvements in build, programming, and outreach, while participating in events to gain recognition and educate others. The team has conducted successful workshops and outreach sessions, reaching hundreds of students while promoting robotics and engineering skills in their community.















































