Swrs 2019
•
0 likes•15 views
This document summarizes the design and evaluation of a novel two degree-of-freedom wearable tactile system that can simulate digit normal and shear forces. The system consists of two wearable devices for the index finger and thumb connected to a microcontroller and graphical user interface. Tests showed the device can exert different shear forces on the fingertips with errors under 0.3 N and forces perceptible to users. The system was also able to simulate realistic digit-object interactions comparable to real manipulation contexts. The device has potential for integration with virtual reality systems to enable multisensory feedback during human-machine interactions.
Report
Share
Report
Share
Download to read offline
Recommended
Fingers inbuilt with remote controller
The document discusses a new technology called I-Point 3D that allows users to control and interact with 3D displays through hand and finger gestures without touching the screen. I-Point 3D uses cameras to detect hand movements in real-time and transmit gesture information. Potential applications mentioned include controlling a TV with hand waves or adjusting medical 3D images during surgery with pointing gestures. The technology could enable interactive window shopping displays and remote-controlled devices through gesture recognition.
Vision-based Finger Detection and Its Applications
The document discusses computer vision techniques for finger detection and tracking, and their applications. It presents methods for fingertip detection using background subtraction, morphological operations and principal component analysis. Fingertip tracking is implemented using a Kalman filter. Two interactive systems are described: i-m-Top, a multi-touch tabletop, and MaC Ball, an interactive 3D display using a transparent ball. Both systems allow finger gestures to control digital content.
HAPTIC_TECH ppt final.pptx
The document discusses haptic technology, which uses tactile feedback to allow users to experience virtual objects through touch. It provides an overview of haptics, including how haptic systems work, different types of haptic devices, and applications in fields like virtual reality, robotics, medicine, and gaming. The document also outlines the history and future potential of haptics, such as for telepresence surgery or interactive holograms. Haptics brings the sense of touch to digital worlds and can increase realism, though challenges remain in precision and cost.
Haptic Technology- Interaction with Virtuality
The document discusses haptic technology, which uses tactile feedback to allow users to interact with virtual objects. It begins by defining haptics and describing how it enhances features of virtual reality like immersion and interaction. It then explains how haptic devices work by applying forces, pressures, or vibrations using actuators. Common haptic devices like the Phantom and CyberGrasp are described. The document outlines several applications of haptics in fields like virtual reality, surgical simulation, mobile phones, and wearable devices. It concludes by discussing the future of haptics, including its growing role in medical training through virtual reality and a shift toward more digital controls using haptic feedback.
Virtual surgery [new].ppt
Virtual reality simulations allow generation of 3D models from patient imaging scans for surgical planning and training. Surgeons can view detailed anatomy, practice procedures, and receive haptic feedback without risk to patients. While early systems had limitations like unrealistic graphics, current VR provides an effective alternative to cadavers for training with benefits like standardized lessons and performance tracking.
Virtual Reality (bring distant near)
Virtual reality: is the term that applies to computer simulated environment that can stimulate the physical presence in place of real world or imaginary world. All components of VR application and interrelations between them are thoroughly examined: input devices, output devices and software.This Paperwill show how to use Virtual Reality to increase the business productivity, application in health sector, entertainment industry, military sector and other sectors. The paper explain different types of virtual reality, architecture of the haptic devices methodologies of the devices, algorithm and conclusion of the research.
Mems sensors controlled haptic forefinger robotic aid
This document summarizes a research paper about a MEMS sensor-controlled haptic forefinger robotic aid. The proposed system uses a MEMS sensor placed on the forefinger to detect the direction of finger movement. This direction information is transmitted via RF to a receiving microcontroller unit that commands a robot to move in the corresponding direction. The design aims to provide a low-cost robotic aid for physically challenged individuals by allowing simple control of a robot through natural forefinger movements. Experimental results validating the forefinger-based directional control of the robot are presented.
Introduction
Haptic technology refers to technology that interfaces with users through the sense of touch. It allows the creation of virtual objects that can be controlled and manipulated. Haptic systems consist of human and machine parts, with the human sensing touch and the machine applying forces and motions. This emerging technology has applications in virtual reality, teleoperation, medicine, and more. It provides tactile and kinesthetic feedback to enhance user experience in virtual environments. Haptic devices measure user input and provide force feedback, allowing for bidirectional interaction between user and virtual world.
Recommended
Fingers inbuilt with remote controller
The document discusses a new technology called I-Point 3D that allows users to control and interact with 3D displays through hand and finger gestures without touching the screen. I-Point 3D uses cameras to detect hand movements in real-time and transmit gesture information. Potential applications mentioned include controlling a TV with hand waves or adjusting medical 3D images during surgery with pointing gestures. The technology could enable interactive window shopping displays and remote-controlled devices through gesture recognition.
Vision-based Finger Detection and Its Applications
The document discusses computer vision techniques for finger detection and tracking, and their applications. It presents methods for fingertip detection using background subtraction, morphological operations and principal component analysis. Fingertip tracking is implemented using a Kalman filter. Two interactive systems are described: i-m-Top, a multi-touch tabletop, and MaC Ball, an interactive 3D display using a transparent ball. Both systems allow finger gestures to control digital content.
HAPTIC_TECH ppt final.pptx
The document discusses haptic technology, which uses tactile feedback to allow users to experience virtual objects through touch. It provides an overview of haptics, including how haptic systems work, different types of haptic devices, and applications in fields like virtual reality, robotics, medicine, and gaming. The document also outlines the history and future potential of haptics, such as for telepresence surgery or interactive holograms. Haptics brings the sense of touch to digital worlds and can increase realism, though challenges remain in precision and cost.
Haptic Technology- Interaction with Virtuality
The document discusses haptic technology, which uses tactile feedback to allow users to interact with virtual objects. It begins by defining haptics and describing how it enhances features of virtual reality like immersion and interaction. It then explains how haptic devices work by applying forces, pressures, or vibrations using actuators. Common haptic devices like the Phantom and CyberGrasp are described. The document outlines several applications of haptics in fields like virtual reality, surgical simulation, mobile phones, and wearable devices. It concludes by discussing the future of haptics, including its growing role in medical training through virtual reality and a shift toward more digital controls using haptic feedback.
Virtual surgery [new].ppt
Virtual reality simulations allow generation of 3D models from patient imaging scans for surgical planning and training. Surgeons can view detailed anatomy, practice procedures, and receive haptic feedback without risk to patients. While early systems had limitations like unrealistic graphics, current VR provides an effective alternative to cadavers for training with benefits like standardized lessons and performance tracking.
Virtual Reality (bring distant near)
Virtual reality: is the term that applies to computer simulated environment that can stimulate the physical presence in place of real world or imaginary world. All components of VR application and interrelations between them are thoroughly examined: input devices, output devices and software.This Paperwill show how to use Virtual Reality to increase the business productivity, application in health sector, entertainment industry, military sector and other sectors. The paper explain different types of virtual reality, architecture of the haptic devices methodologies of the devices, algorithm and conclusion of the research.
Mems sensors controlled haptic forefinger robotic aid
This document summarizes a research paper about a MEMS sensor-controlled haptic forefinger robotic aid. The proposed system uses a MEMS sensor placed on the forefinger to detect the direction of finger movement. This direction information is transmitted via RF to a receiving microcontroller unit that commands a robot to move in the corresponding direction. The design aims to provide a low-cost robotic aid for physically challenged individuals by allowing simple control of a robot through natural forefinger movements. Experimental results validating the forefinger-based directional control of the robot are presented.
Introduction
Haptic technology refers to technology that interfaces with users through the sense of touch. It allows the creation of virtual objects that can be controlled and manipulated. Haptic systems consist of human and machine parts, with the human sensing touch and the machine applying forces and motions. This emerging technology has applications in virtual reality, teleoperation, medicine, and more. It provides tactile and kinesthetic feedback to enhance user experience in virtual environments. Haptic devices measure user input and provide force feedback, allowing for bidirectional interaction between user and virtual world.
Design a System for Hand Gesture Recognition with Neural Network
This document proposes a system for recognizing hand gestures using surface electromyography (sEMG) and artificial neural networks. sEMG signals are collected from the forearm using a Myo wristband to measure muscle activity. The signals are preprocessed to remove noise and extract time and frequency domain features. An artificial neural network classifier is then trained to predict different gesture classes from the features, achieving 87.32% accuracy in recognizing various hand movements. The proposed system provides an effective method for hand gesture recognition using sEMG signals and neural networks for applications in human-computer interaction and assistive technologies.
Haptic technology
Haptic technology adds the sense of touch to virtual environments through haptic interfaces. This allows users to feel virtual objects on a computer through forces, vibrations, and motions. Haptic interfaces track user movements and apply forces through motors. Haptic rendering algorithms compute interaction forces between virtual objects and the user's movements in real-time. Applications include medical training simulations, remote robotics, virtual prototyping, and assisting those with disabilities.
HaREHABGloveRAD2016
Approximately 800,000 people in the US have strokes each year, with 30-66% experiencing impaired hand function. A soft robotic rehabilitation glove has been developed to provide hand therapy through continuous passive motion and patient assisted movement. A study compared the range of motion of a human finger to a corresponding robotic digit, finding their ranges of motion to be in good agreement. Future work will modify the robotic glove design based on additional experimental data to optimize control parameters and accommodate human finger anatomical characteristics for clinical evaluation and hand therapy.
IRJET- Human Activity Recognition using Flex Sensors
This document discusses a system for human activity recognition using flex sensors. Flex sensors are attached to the body and can detect movements. The flex sensor data is fed into a neural network model to recognize activities. The model is trained using flex sensor data from various human activities. The trained model can then accurately recognize activities based on new flex sensor input data. The system is meant to help elderly people or those with disabilities by allowing them to control devices with body movements detected by flex sensors. It aims to provide a modular system that can adapt to new users and disabilities. Flex sensors make the system customizable while neural networks enable accurate activity recognition.
Haptic Technology
Haptic technology allows users to feel and interact with virtual objects through touch. It combines tactile (touch) and kinesthetic (motion) feedback to simulate real textures and sensations. Common haptic devices include Phantom devices, which allow users to touch 3D virtual objects, and cyber gloves, which provide force feedback to fingers. Haptic technology has applications in gaming, mobile devices, assistive technologies, medical training, and more. However, challenges remain in matching the high performance of human touch and reducing the size and cost of haptic interfaces.
Haptic technology
This presentation is about the basic haptic technology. what it is? how it works?? & what are the terms we need to know to make full understanding of this technology.
qwerasdfzxcv
This document presents research on developing a framework for human-computer interaction using hand gestures. It discusses how hand gestures provide a natural interface and outlines the key steps in the proposed solution: hand segmentation using skin-based color detection, preprocessing, feature extraction, image acquisition, and gesture recognition. Experimental results showed an overall accuracy of 95.44% for recognizing six static hand gesture classes. Future work could explore improving robustness to variations in lighting, background, and hand pose and expanding the system to recognize more gesture classes.
Haptic Technology - A Sense of Touch
Haptics is the science of applying touch (tactile) sensation and control to interact with computer applications. Haptic device gives people a sense of touch with computer generated environments, so that when virtual objects are touched, they seem real and tangible. Haptic technology refers to technology that interfaces the user with a virtual environment via the sense of touch by applying forces, vibrations, and/or motions to the user. This mechanical stimulation may be used to assist in the creation of virtual objects (objects existing only in a computer simulation), for control of such virtual objects, and to enhance the remote control of machines and devices. This paper includes how haptic technology works, about its devices, its technologies, its applications, future developments and disadvantages.
A Review on Design and Modeling of Artificial Hand
This document provides a review of the design and modeling of artificial hands. It discusses several key points:
1) Artificial hands are typically made of lightweight materials like acrylic, aluminum, and iron. They include embedded systems, sensors, microcontrollers and actuators to enable grasping and gripping of objects.
2) Sensors like EMG and joint angle sensors provide feedback to microcontrollers to control servomotors and actuate finger movement. This allows the hands to grasp objects of different shapes and sizes.
3) Several studies discuss prototypes of prosthetic hands and gloves that use pneumatic muscles, links, and 3D printing to create lightweight dexterous designs controllable using EMG signals from the user's
Design and Development ofa Mirror Effect Control Prosthetic Hand with Force S...
Some of the already available prosthetic hands in the market are operated in open loop, without
any feedback and expensive. This system counters those by having the prosthetic hand printed using 3D
printer and consist of a feedback sensor to make it a closed loop system. The system generally consists of
two sections, mainly Finger Input and Prosthetic Output. The two sections communicate wirelessly for data
transferring. The main purpose of the system is to control the prosthetic hand wirelessly using the Mirror
Glove by performing a mirror effect that will translate movement from the glove onto the prosthetic hand.
The Mirror Glove monitors the movements/bending of each fingers using force sensitive sensor. The
prosthetic hand also has a sensor known as force sensitive resistor. The sensors will feedback the
pressure on the prosthetic hand during object grasping, allowing the prosthetic hand to grasp delicate
object without damaging it. Overall, the system will imitate the flex and relaxing of fingers inside the Mirror
Glove and wirelessly control distant prosthetic hand to imitate the human hand.
A Simulation Method of Soft Tissue Cutting In Virtual Environment with Haptics
Currently, virtual simulation has an increasing role in the medical field. Now virtual surgery simulation has been largely explored in medical field. Virtual surgery is a good complement to traditional Surgical Training. Modeling effects of soft tissue during cutting is quite complex, hence the concept of virtuality is used to develop realistic surgical instruments for providing exact force feedback to the surgeon during surgical operation and simulation of soft tissue processes. Scalpel is a basic instrument required for soft tissue simulation. Hence we will design a virtual organ to cut by using Scalpel in Haptic Environment.
Myo armband project
Electromyography (EMG) is a technique for evaluating and recording the electrical activity produced by skeletal muscles. EMG is performed using an instrument called an electromyograph, to produce a record called an electromyogram. An electromyograph detects the electrical potential generated by muscle cells, when these cells are electrically or neurologically activated. The signals can be analyzed to detect medical abnormalities, activation level, or recruitment order or to analyze the biomechanics of human or animal movement.
Haptic technology
This document summarizes haptic technology, which uses tactile feedback to allow users to interact with virtual objects through touch. Haptic technology provides forces, vibrations and motions to simulate touch. It works by using haptic devices, transducers and rendering algorithms to detect collisions between virtual objects and calculate appropriate feedback. Haptic technology has applications in gaming, virtual education, and medical simulation to provide more realistic digital experiences.
Recognition of sign language hand gestures using leap motion sensor based on ...
Hand gesture recognition is a topic that is still investigated by many scientists for numerous useful aspects. This research investigated hand gestures for sign language number zero to nine. The hand gesture recognition was based on finger direction patterns. The finger directions were detected by a Leap Motion Controller. Finger direction pattern modeling was based on two methods: threshold and artificial neural network. Threshold model 1 contained 15 rules based on the range of finger directions on each axis. Threshold model 2 was developed from model 1 based on the behavior of finger movements when the subject performed hand gestures. The ANN model of the system was designed with four neurons at the output layer, 15 neurons at the input layer, seven neurons at the first hidden layer and 5 neurons at the second hidden layer. The artificial neural network used the logsig as the activation function. The result shows that the first threshold model has the lowest accuracy because the rule is too complicated and rigid. The threshold model 2 can improve the threshold model, but it still needs development to reach better accuracy. The ANN model gave the best result among the developed model with 98% accuracy. LMC produces useful biometric data for hand gesture recognition.
virtual surgery
Virtual reality simulation allows surgeons to practice complex procedures, view detailed 3D models of patient anatomy, and reduce errors by planning surgeries in virtual environments before operating on real patients. VR simulators are used for surgical training, planning, navigation and guidance, and even remote "tele-surgery". While early systems had limitations, medical VR has advanced significantly and proven effective for improving skills, access to care, and outcomes.
14 561
This document provides an overview of touchless touchscreen technology. It describes the hardware and software requirements including sensor installation and calibration. The document then analyzes how touchless touchscreens work by detecting hand movements using sensors without physical contact. Several applications are discussed including use in medical settings where sterile conditions are required, as interactive kiosks or displays, and future possibilities like interactive walls or surfaces. The conclusion is that this technology has significant potential in healthcare and other fields by providing more natural human-computer interaction.
Medical Handsfree System - Project Paper
This document describes a medical hands-free system using gesture recognition to help surgeons keep track of surgical instruments and materials without direct contact. It uses a Leap Motion controller to detect hand movements and recognize customized gestures. Image moments are used to distinguish between gestures by calculating weighted averages of pixel distributions in captured images. The goal is to introduce hands-free control to medical settings where direct contact poses infection risks, helping surgeons prevent accidental retention of foreign objects in patients.
Revolutionizing Creativity and Communication: Introducing Air Canvas
1. The document introduces Air Canvas, an interactive drawing platform that allows users to paint in mid-air using hand gestures detected through computer vision techniques.
2. It leverages OpenCV and MediaPipe to monitor real-time hand movements with precision and translate hand gestures into strokes on a digital canvas.
3. This work underscores the potential of computer vision and gesture recognition for immersive, creative applications that bridge the gap between technology and art.
Eurosensors_Anton
This document presents a multisensory glove that allows prosthetic hands to sense pressure, temperature, and humidity. Off-the-shelf pressure, temperature, and humidity sensors were attached to a flexible printed circuit board and then the board was attached to a glove. The glove was tested on a prosthetic hand by having the hand grasp various objects. Sensors on the glove successfully measured contact parameters like pressure, temperature, and humidity. The low-cost implementation of the smart sensing glove is a step toward providing tactile feedback to prosthetic hand users.
Touché Enhancing Touch Interaction on Humans, Screens, Liqu.docx
Touché: Enhancing Touch Interaction on
Humans, Screens, Liquids, and Everyday Objects
ABSTRACT
Touché proposes a novel Swept Frequency Capacitive Sens-
ing technique that can not only detect a touch event, but also
recognize complex configurations of the human hands and
body. Such contextual information significantly enhances
touch interaction in a broad range of applications, from
conventional touchscreens to unique contexts and materials.
For example, in our explorations we add touch and gesture
sensitivity to the human body and liquids. We demonstrate
the rich capabilities of Touché with five example setups
from different application domains and conduct experi-
mental studies that show gesture classification accuracies of
99% are achievable with our technology.
Author Keywords: Touch, gestures, ubiquitous interfaces,
sensors, on-body computing, mobile devices.
ACM Classification Keywords
H.5.2 [Information interfaces and presentation]: User Inter-
faces - Graphical user interfaces; Input devices & strategies.
INTRODUCTION
Touché is a novel capacitive touch sensing technology that
provides rich touch and gesture sensitivity to a variety of
analogue and digital objects. The technology is scalable,
i.e., the same sensor is equally effective for a pencil, a door-
knob, a mobile phone or a table. Gesture recognition also
scales with objects: a Touché enhanced doorknob can cap-
ture the configuration of fingers touching it, while a table
can track the posture of the entire user (Figures 1b, 6 and 7).
Sensing with Touché is not limited to inanimate objects –
the user’s body can also be made touch and gesture sensi-
tive (Figures 1a and 9). In general, Touché makes it very
easy to add touch and gesture interactivity to unusual, non-
solid objects and materials, such as a body of water. Using
Touché we can recognize when users touch the water’s sur-
face or dip their fingers into it (Figures 1c and 10).
Notably, instrumenting objects, humans and liquids with
Touché is trivial: a single electrode embedded into an object
and attached to our sensor controller is sufficient to compu-
tationally enhance an object with rich touch and gesture
interactivity. Furthermore, in the case of conductive objects,
e.g., doorknobs or a body of water, the object itself acts as
an intrinsic electrode – no additional instrumentation is nec-
essary. Finally, Touché is inexpensive, safe, low power and
compact; it can be easily embedded or temporarily attached
anywhere touch and gesture sensitivity is desired.
Touché proposes a novel form of capacitive touch sensing
that we call Swept Frequency Capacitive Sensing (SFCS).
In a typical capacitive touch sensor, a conductive object is
excited by an electrical signal at a fixed frequency. The
sensing circuit monitors the return signal and determines
touch events by identifying changes in this signal caused by
the electrical properties of the human hand touching the
object [46]. In ...
Research Summary
This document summarizes the research areas and background of Simone Toma, PhD. Her research focuses on active perception, motor control, sensorimotor integration, psychophysics, virtual reality, and wearable haptics. She is an Assistant Research Professor in the neural control of movement laboratory, where her work involves studying how the brain controls movement through analyzing electromyography data, lifting tasks, muscle activation, and integrating sensory feedback into motor control.
Ncm2019
The document describes a study that tested whether muscle synergies underlie active perception of force. Participants judged if an upward force was applied to their forearm while maintaining posture. A model based on modulation of elbow and shoulder muscle synergies (MSM) explained about 70% of participants' ability to perceive force, compared to 50% for a model of individual muscle activity. The findings provide evidence that motor synergies involved in the task underlie force perception, suggesting synergies simplify sampling of relevant sensory inputs.
More Related Content
Similar to Swrs 2019
Design a System for Hand Gesture Recognition with Neural Network
This document proposes a system for recognizing hand gestures using surface electromyography (sEMG) and artificial neural networks. sEMG signals are collected from the forearm using a Myo wristband to measure muscle activity. The signals are preprocessed to remove noise and extract time and frequency domain features. An artificial neural network classifier is then trained to predict different gesture classes from the features, achieving 87.32% accuracy in recognizing various hand movements. The proposed system provides an effective method for hand gesture recognition using sEMG signals and neural networks for applications in human-computer interaction and assistive technologies.
Haptic technology
Haptic technology adds the sense of touch to virtual environments through haptic interfaces. This allows users to feel virtual objects on a computer through forces, vibrations, and motions. Haptic interfaces track user movements and apply forces through motors. Haptic rendering algorithms compute interaction forces between virtual objects and the user's movements in real-time. Applications include medical training simulations, remote robotics, virtual prototyping, and assisting those with disabilities.
HaREHABGloveRAD2016
Approximately 800,000 people in the US have strokes each year, with 30-66% experiencing impaired hand function. A soft robotic rehabilitation glove has been developed to provide hand therapy through continuous passive motion and patient assisted movement. A study compared the range of motion of a human finger to a corresponding robotic digit, finding their ranges of motion to be in good agreement. Future work will modify the robotic glove design based on additional experimental data to optimize control parameters and accommodate human finger anatomical characteristics for clinical evaluation and hand therapy.
IRJET- Human Activity Recognition using Flex Sensors
This document discusses a system for human activity recognition using flex sensors. Flex sensors are attached to the body and can detect movements. The flex sensor data is fed into a neural network model to recognize activities. The model is trained using flex sensor data from various human activities. The trained model can then accurately recognize activities based on new flex sensor input data. The system is meant to help elderly people or those with disabilities by allowing them to control devices with body movements detected by flex sensors. It aims to provide a modular system that can adapt to new users and disabilities. Flex sensors make the system customizable while neural networks enable accurate activity recognition.
Haptic Technology
Haptic technology allows users to feel and interact with virtual objects through touch. It combines tactile (touch) and kinesthetic (motion) feedback to simulate real textures and sensations. Common haptic devices include Phantom devices, which allow users to touch 3D virtual objects, and cyber gloves, which provide force feedback to fingers. Haptic technology has applications in gaming, mobile devices, assistive technologies, medical training, and more. However, challenges remain in matching the high performance of human touch and reducing the size and cost of haptic interfaces.
Haptic technology
This presentation is about the basic haptic technology. what it is? how it works?? & what are the terms we need to know to make full understanding of this technology.
qwerasdfzxcv
This document presents research on developing a framework for human-computer interaction using hand gestures. It discusses how hand gestures provide a natural interface and outlines the key steps in the proposed solution: hand segmentation using skin-based color detection, preprocessing, feature extraction, image acquisition, and gesture recognition. Experimental results showed an overall accuracy of 95.44% for recognizing six static hand gesture classes. Future work could explore improving robustness to variations in lighting, background, and hand pose and expanding the system to recognize more gesture classes.
Haptic Technology - A Sense of Touch
Haptics is the science of applying touch (tactile) sensation and control to interact with computer applications. Haptic device gives people a sense of touch with computer generated environments, so that when virtual objects are touched, they seem real and tangible. Haptic technology refers to technology that interfaces the user with a virtual environment via the sense of touch by applying forces, vibrations, and/or motions to the user. This mechanical stimulation may be used to assist in the creation of virtual objects (objects existing only in a computer simulation), for control of such virtual objects, and to enhance the remote control of machines and devices. This paper includes how haptic technology works, about its devices, its technologies, its applications, future developments and disadvantages.
A Review on Design and Modeling of Artificial Hand
This document provides a review of the design and modeling of artificial hands. It discusses several key points:
1) Artificial hands are typically made of lightweight materials like acrylic, aluminum, and iron. They include embedded systems, sensors, microcontrollers and actuators to enable grasping and gripping of objects.
2) Sensors like EMG and joint angle sensors provide feedback to microcontrollers to control servomotors and actuate finger movement. This allows the hands to grasp objects of different shapes and sizes.
3) Several studies discuss prototypes of prosthetic hands and gloves that use pneumatic muscles, links, and 3D printing to create lightweight dexterous designs controllable using EMG signals from the user's
Design and Development ofa Mirror Effect Control Prosthetic Hand with Force S...
Some of the already available prosthetic hands in the market are operated in open loop, without
any feedback and expensive. This system counters those by having the prosthetic hand printed using 3D
printer and consist of a feedback sensor to make it a closed loop system. The system generally consists of
two sections, mainly Finger Input and Prosthetic Output. The two sections communicate wirelessly for data
transferring. The main purpose of the system is to control the prosthetic hand wirelessly using the Mirror
Glove by performing a mirror effect that will translate movement from the glove onto the prosthetic hand.
The Mirror Glove monitors the movements/bending of each fingers using force sensitive sensor. The
prosthetic hand also has a sensor known as force sensitive resistor. The sensors will feedback the
pressure on the prosthetic hand during object grasping, allowing the prosthetic hand to grasp delicate
object without damaging it. Overall, the system will imitate the flex and relaxing of fingers inside the Mirror
Glove and wirelessly control distant prosthetic hand to imitate the human hand.
A Simulation Method of Soft Tissue Cutting In Virtual Environment with Haptics
Currently, virtual simulation has an increasing role in the medical field. Now virtual surgery simulation has been largely explored in medical field. Virtual surgery is a good complement to traditional Surgical Training. Modeling effects of soft tissue during cutting is quite complex, hence the concept of virtuality is used to develop realistic surgical instruments for providing exact force feedback to the surgeon during surgical operation and simulation of soft tissue processes. Scalpel is a basic instrument required for soft tissue simulation. Hence we will design a virtual organ to cut by using Scalpel in Haptic Environment.
Myo armband project
Electromyography (EMG) is a technique for evaluating and recording the electrical activity produced by skeletal muscles. EMG is performed using an instrument called an electromyograph, to produce a record called an electromyogram. An electromyograph detects the electrical potential generated by muscle cells, when these cells are electrically or neurologically activated. The signals can be analyzed to detect medical abnormalities, activation level, or recruitment order or to analyze the biomechanics of human or animal movement.
Haptic technology
This document summarizes haptic technology, which uses tactile feedback to allow users to interact with virtual objects through touch. Haptic technology provides forces, vibrations and motions to simulate touch. It works by using haptic devices, transducers and rendering algorithms to detect collisions between virtual objects and calculate appropriate feedback. Haptic technology has applications in gaming, virtual education, and medical simulation to provide more realistic digital experiences.
Recognition of sign language hand gestures using leap motion sensor based on ...
Hand gesture recognition is a topic that is still investigated by many scientists for numerous useful aspects. This research investigated hand gestures for sign language number zero to nine. The hand gesture recognition was based on finger direction patterns. The finger directions were detected by a Leap Motion Controller. Finger direction pattern modeling was based on two methods: threshold and artificial neural network. Threshold model 1 contained 15 rules based on the range of finger directions on each axis. Threshold model 2 was developed from model 1 based on the behavior of finger movements when the subject performed hand gestures. The ANN model of the system was designed with four neurons at the output layer, 15 neurons at the input layer, seven neurons at the first hidden layer and 5 neurons at the second hidden layer. The artificial neural network used the logsig as the activation function. The result shows that the first threshold model has the lowest accuracy because the rule is too complicated and rigid. The threshold model 2 can improve the threshold model, but it still needs development to reach better accuracy. The ANN model gave the best result among the developed model with 98% accuracy. LMC produces useful biometric data for hand gesture recognition.
virtual surgery
Virtual reality simulation allows surgeons to practice complex procedures, view detailed 3D models of patient anatomy, and reduce errors by planning surgeries in virtual environments before operating on real patients. VR simulators are used for surgical training, planning, navigation and guidance, and even remote "tele-surgery". While early systems had limitations, medical VR has advanced significantly and proven effective for improving skills, access to care, and outcomes.
14 561
This document provides an overview of touchless touchscreen technology. It describes the hardware and software requirements including sensor installation and calibration. The document then analyzes how touchless touchscreens work by detecting hand movements using sensors without physical contact. Several applications are discussed including use in medical settings where sterile conditions are required, as interactive kiosks or displays, and future possibilities like interactive walls or surfaces. The conclusion is that this technology has significant potential in healthcare and other fields by providing more natural human-computer interaction.
Medical Handsfree System - Project Paper
This document describes a medical hands-free system using gesture recognition to help surgeons keep track of surgical instruments and materials without direct contact. It uses a Leap Motion controller to detect hand movements and recognize customized gestures. Image moments are used to distinguish between gestures by calculating weighted averages of pixel distributions in captured images. The goal is to introduce hands-free control to medical settings where direct contact poses infection risks, helping surgeons prevent accidental retention of foreign objects in patients.
Revolutionizing Creativity and Communication: Introducing Air Canvas
1. The document introduces Air Canvas, an interactive drawing platform that allows users to paint in mid-air using hand gestures detected through computer vision techniques.
2. It leverages OpenCV and MediaPipe to monitor real-time hand movements with precision and translate hand gestures into strokes on a digital canvas.
3. This work underscores the potential of computer vision and gesture recognition for immersive, creative applications that bridge the gap between technology and art.
Eurosensors_Anton
This document presents a multisensory glove that allows prosthetic hands to sense pressure, temperature, and humidity. Off-the-shelf pressure, temperature, and humidity sensors were attached to a flexible printed circuit board and then the board was attached to a glove. The glove was tested on a prosthetic hand by having the hand grasp various objects. Sensors on the glove successfully measured contact parameters like pressure, temperature, and humidity. The low-cost implementation of the smart sensing glove is a step toward providing tactile feedback to prosthetic hand users.
Touché Enhancing Touch Interaction on Humans, Screens, Liqu.docx
Touché: Enhancing Touch Interaction on
Humans, Screens, Liquids, and Everyday Objects
ABSTRACT
Touché proposes a novel Swept Frequency Capacitive Sens-
ing technique that can not only detect a touch event, but also
recognize complex configurations of the human hands and
body. Such contextual information significantly enhances
touch interaction in a broad range of applications, from
conventional touchscreens to unique contexts and materials.
For example, in our explorations we add touch and gesture
sensitivity to the human body and liquids. We demonstrate
the rich capabilities of Touché with five example setups
from different application domains and conduct experi-
mental studies that show gesture classification accuracies of
99% are achievable with our technology.
Author Keywords: Touch, gestures, ubiquitous interfaces,
sensors, on-body computing, mobile devices.
ACM Classification Keywords
H.5.2 [Information interfaces and presentation]: User Inter-
faces - Graphical user interfaces; Input devices & strategies.
INTRODUCTION
Touché is a novel capacitive touch sensing technology that
provides rich touch and gesture sensitivity to a variety of
analogue and digital objects. The technology is scalable,
i.e., the same sensor is equally effective for a pencil, a door-
knob, a mobile phone or a table. Gesture recognition also
scales with objects: a Touché enhanced doorknob can cap-
ture the configuration of fingers touching it, while a table
can track the posture of the entire user (Figures 1b, 6 and 7).
Sensing with Touché is not limited to inanimate objects –
the user’s body can also be made touch and gesture sensi-
tive (Figures 1a and 9). In general, Touché makes it very
easy to add touch and gesture interactivity to unusual, non-
solid objects and materials, such as a body of water. Using
Touché we can recognize when users touch the water’s sur-
face or dip their fingers into it (Figures 1c and 10).
Notably, instrumenting objects, humans and liquids with
Touché is trivial: a single electrode embedded into an object
and attached to our sensor controller is sufficient to compu-
tationally enhance an object with rich touch and gesture
interactivity. Furthermore, in the case of conductive objects,
e.g., doorknobs or a body of water, the object itself acts as
an intrinsic electrode – no additional instrumentation is nec-
essary. Finally, Touché is inexpensive, safe, low power and
compact; it can be easily embedded or temporarily attached
anywhere touch and gesture sensitivity is desired.
Touché proposes a novel form of capacitive touch sensing
that we call Swept Frequency Capacitive Sensing (SFCS).
In a typical capacitive touch sensor, a conductive object is
excited by an electrical signal at a fixed frequency. The
sensing circuit monitors the return signal and determines
touch events by identifying changes in this signal caused by
the electrical properties of the human hand touching the
object [46]. In ...
Similar to Swrs 2019 (20)
Design a System for Hand Gesture Recognition with Neural Network
Design a System for Hand Gesture Recognition with Neural Network
IRJET- Human Activity Recognition using Flex Sensors
IRJET- Human Activity Recognition using Flex Sensors
A Review on Design and Modeling of Artificial Hand
A Review on Design and Modeling of Artificial Hand
Design and Development ofa Mirror Effect Control Prosthetic Hand with Force S...
Design and Development ofa Mirror Effect Control Prosthetic Hand with Force S...
A Simulation Method of Soft Tissue Cutting In Virtual Environment with Haptics
A Simulation Method of Soft Tissue Cutting In Virtual Environment with Haptics
Recognition of sign language hand gestures using leap motion sensor based on ...
Recognition of sign language hand gestures using leap motion sensor based on ...
Revolutionizing Creativity and Communication: Introducing Air Canvas
Revolutionizing Creativity and Communication: Introducing Air Canvas
Touché Enhancing Touch Interaction on Humans, Screens, Liqu.docx
Touché Enhancing Touch Interaction on Humans, Screens, Liqu.docx
More from Simone Toma
Research Summary
This document summarizes the research areas and background of Simone Toma, PhD. Her research focuses on active perception, motor control, sensorimotor integration, psychophysics, virtual reality, and wearable haptics. She is an Assistant Research Professor in the neural control of movement laboratory, where her work involves studying how the brain controls movement through analyzing electromyography data, lifting tasks, muscle activation, and integrating sensory feedback into motor control.
Ncm2019
The document describes a study that tested whether muscle synergies underlie active perception of force. Participants judged if an upward force was applied to their forearm while maintaining posture. A model based on modulation of elbow and shoulder muscle synergies (MSM) explained about 70% of participants' ability to perceive force, compared to 50% for a model of individual muscle activity. The findings provide evidence that motor synergies involved in the task underlie force perception, suggesting synergies simplify sampling of relevant sensory inputs.
Ncm 2018
1. Both tactile and non-tactile force-related inputs contribute to the estimation of fingertip distance, and these signals appear to be linearly integrated.
2. Tactile signals alone or non-tactile signals alone elicited a smaller bias than when presented together.
3. The observation of bias in perceived relative finger position based on tactile and non-tactile signals suggests this estimation involves the cerebellum and parietal lobule.
Sfn2017
1. This study examined how visual feedback of arm movements affects grip force control when the visual feedback is rotated and conflicts with proprioceptive feedback.
2. The results showed that when visual feedback of arm movements conflicts with proprioceptive feedback, it can elicit independent changes in the temporal pattern of grip force control.
3. Specifically, the time to peak grip force was gradually scaled over the first 10 trials when exposed to conflicting visual feedback, suggesting vision influences grip force control even after object contact. However, this visual influence on grip force plateaued with repetitions, indicating somatosensory information gains prominence.
Sf n 2016
Simone Toma proposes a method to quantify the contribution of central motor signals to force perception. The method correlates muscle activity (EMG) recorded from 8 arm muscles with subjects' responses during a force detection task. Logistic regression was used to build "muscle-metric curves" from weighted EMG data and compare them to subjects' "psycho-metric curves" based on responses. Muscle-metric curves explained up to 60% of the variability in subjects' responses, supporting the role of central motor signals in force perception. Model selection found that curves from as few as 3 muscles captured key features, and muscle synergies reconstructed perceptual probabilities, further linking muscle coordination to force perception.
Bm es 2017.pptx
1) The document presents two models - a muscle synergy model (MSM) and most contributive model (MCM) - to explain how force perception arises from the activation of multiple muscles.
2) An experiment is proposed to test which model better accounts for force perception, involving measuring muscle activation via EMG and relating it to subjects' force judgments.
3) Preliminary results from some subjects show the MSM model fits their force perception better than the MCM model, providing initial evidence the MSM may generally better describe the relationship between muscle control and sensed force.
More from Simone Toma (6)
Recently uploaded
IEEE CIS Webinar Sustainable futures.pdf
The importance of sustainable and efficient computational practices in artificial intelligence (AI) and deep learning has become increasingly critical. This webinar focuses on the intersection of sustainability and AI, highlighting the significance of energy-efficient deep learning, innovative randomization techniques in neural networks, the potential of reservoir computing, and the cutting-edge realm of neuromorphic computing. This webinar aims to connect theoretical knowledge with practical applications and provide insights into how these innovative approaches can lead to more robust, efficient, and environmentally conscious AI systems.
Webinar Speaker: Prof. Claudio Gallicchio, Assistant Professor, University of Pisa
Claudio Gallicchio is an Assistant Professor at the Department of Computer Science of the University of Pisa, Italy. His research involves merging concepts from Deep Learning, Dynamical Systems, and Randomized Neural Systems, and he has co-authored over 100 scientific publications on the subject. He is the founder of the IEEE CIS Task Force on Reservoir Computing, and the co-founder and chair of the IEEE Task Force on Randomization-based Neural Networks and Learning Systems. He is an associate editor of IEEE Transactions on Neural Networks and Learning Systems (TNNLS).
Bridging the visual gap between cultural heritage and digital scholarship
Presentation of DARIAH FI activities in DARIAH Annual Event 2024 in Lisboa.
2 December UAE National Day - United Arab Emirates
UAE National Day, celebrated on December 2nd, commemorates the unification of the seven emirates and reflects national pride and unity.
The Intersection between Competition and Data Privacy – COLANGELO – June 2024...
The Intersection between Competition and Data Privacy – COLANGELO – June 2024...OECD Directorate for Financial and Enterprise Affairs
This presentation by Professor Giuseppe Colangelo, Jean Monnet Professor of European Innovation Policy, was made during the discussion “The Intersection between Competition and Data Privacy” held at the 143rd meeting of the OECD Competition Committee on 13 June 2024. More papers and presentations on the topic can be found at oe.cd/ibcdp.
This presentation was uploaded with the author’s consent.
Using-Presentation-Software-to-the-Fullf.pptx
Slides on 7 Commonly Used Presentation Softwares; thier usage and features.
SASi-SPi Science Policy Lab Pre-engagement
11June 2024. An online pre-engagement session was organized on Tuesday June 11 to introduce the Science Policy Lab approach and the main components of the conceptual framework.
About 40 experts from around the globe gathered online for a pre-engagement session, paving the way for the first SASi-SPi Science Policy Lab event scheduled for June 18-19, 2024 in Malmö. The session presented the objectives for the upcoming Science Policy Lab (S-PoL), which featured a role-playing game designed to simulate stakeholder interactions and policy interventions for food systems transitions. Participants called for the sharing of meeting materials and continued collaboration, reflecting a strong commitment to advancing towards sustainable agrifood systems.
The Intersection between Competition and Data Privacy – CAPEL – June 2024 OEC...
The Intersection between Competition and Data Privacy – CAPEL – June 2024 OEC...OECD Directorate for Financial and Enterprise Affairs
This presentation by Tim Capel, Director of the UK Information Commissioner’s Office Legal Service, was made during the discussion “The Intersection between Competition and Data Privacy” held at the 143rd meeting of the OECD Competition Committee on 13 June 2024. More papers and presentations on the topic can be found at oe.cd/ibcdp.
This presentation was uploaded with the author’s consent.
The Intersection between Competition and Data Privacy – KEMP – June 2024 OECD...
The Intersection between Competition and Data Privacy – KEMP – June 2024 OECD...OECD Directorate for Financial and Enterprise Affairs
This presentation by Katharine Kemp, Associate Professor at the Faculty of Law & Justice at UNSW Sydney, was made during the discussion “The Intersection between Competition and Data Privacy” held at the 143rd meeting of the OECD Competition Committee on 13 June 2024. More papers and presentations on the topic can be found at oe.cd/ibcdp.
This presentation was uploaded with the author’s consent.
Proposal: The Ark Project and The BEEP Inc
1.) Introduction
Our Movement is not new; it is the same as it was for Freedom, Justice, and Equality since we were labeled as slaves. However, this movement at its core must entail economics.
2.) Historical Context
This is the same movement because none of the previous movements, such as boycotts, were ever completed. For some, maybe, but for the most part, it’s just a place to keep your stable until you’re ready to assimilate them into your system. The rest of the crabs are left in the world’s worst parts, begging for scraps.
3.) Economic Empowerment
Our Movement aims to show that it is indeed possible for the less fortunate to establish their economic system. Everyone else – Caucasian, Asian, Mexican, Israeli, Jews, etc. – has their systems, and they all set up and usurp money from the less fortunate. So, the less fortunate buy from every one of them, yet none of them buy from the less fortunate. Moreover, the less fortunate really don’t have anything to sell.
4.) Collaboration with Organizations
Our Movement will demonstrate how organizations such as the National Association for the Advancement of Colored People, National Urban League, Black Lives Matter, and others can assist in creating a much more indestructible Black Wall Street.
5.) Vision for the Future
Our Movement will not settle for less than those who came before us and stopped before the rights were equal. The economy, jobs, healthcare, education, housing, incarceration – everything is unfair, and what isn’t is rigged for the less fortunate to fail, as evidenced in society.
6.) Call to Action
Our movement has started and implemented everything needed for the advancement of the economic system. There are positions for only those who understand the importance of this movement, as failure to address it will continue the degradation of the people deemed less fortunate.
No, this isn’t Noah’s Ark, nor am I a Prophet. I’m just a man who wrote a couple of books, created a magnificent website: http://www.thearkproject.llc, and who truly hopes to try and initiate a truly sustainable economic system for deprived people. We may not all have the same beliefs, but if our methods are tried, tested, and proven, we can come together and help others. My website: http://www.thearkproject.llc is very informative and considerably controversial. Please check it out, and if you are afraid, leave immediately; it’s no place for cowards. The last Prophet said: “Whoever among you sees an evil action, then let him change it with his hand [by taking action]; if he cannot, then with his tongue [by speaking out]; and if he cannot, then, with his heart – and that is the weakest of faith.” [Sahih Muslim] If we all, or even some of us, did this, there would be significant change. We are able to witness it on small and grand scales, for example, from climate control to business partnerships. I encourage, invite, and challenge you all to support me by visiting my website.
Gamify it until you make it Improving Agile Development and Operations with ...
So many challenges, so little time. While we’re busy developing software and keeping it operational, we also need to sharpen the saw, but how? Gamification can be a way to look at how you’re doing and find out where to improve. It’s a great way to have everyone involved and get the best out of people.
In this presentation, Ben Linders will show how playing games with the DevOps coaching cards can help to explore your current development and deployment (DevOps) practices and decide as a team what to improve or experiment with.
The games that we play are based on an engagement model. Instead of imposing change, the games enable people to pull in ideas for change and apply those in a way that best suits their collective needs.
By playing games, you can learn from each other. Teams can use games, exercises, and coaching cards to discuss values, principles, and practices, and share their experiences and learnings.
Different game formats can be used to share experiences on DevOps principles and practices and explore how they can be applied effectively. This presentation provides an overview of playing formats and will inspire you to come up with your own formats.
怎么办理(lincoln学位证书)英国林肯大学毕业证文凭学位证书原版一模一样
原版定制【微信:bwp0011】《(lincoln学位证书)英国林肯大学毕业证文凭学位证书》【微信:bwp0011】成绩单 、雅思、外壳、留信学历认证永久存档查询,采用学校原版纸张、特殊工艺完全按照原版一比一制作(包括:隐形水印,阴影底纹,钢印LOGO烫金烫银,LOGO烫金烫银复合重叠,文字图案浮雕,激光镭射,紫外荧光,温感,复印防伪)行业标杆!精益求精,诚心合作,真诚制作!多年品质 ,按需精细制作,24小时接单,全套进口原装设备,十五年致力于帮助留学生解决难题,业务范围有加拿大、英国、澳洲、韩国、美国、新加坡,新西兰等学历材料,包您满意。
【业务选择办理准则】
一、工作未确定,回国需先给父母、亲戚朋友看下文凭的情况,办理一份就读学校的毕业证【微信bwp0011】文凭即可
二、回国进私企、外企、自己做生意的情况,这些单位是不查询毕业证真伪的,而且国内没有渠道去查询国外文凭的真假,也不需要提供真实教育部认证。鉴于此,办理一份毕业证【微信bwp0011】即可
三、进国企,银行,事业单位,考公务员等等,这些单位是必需要提供真实教育部认证的,办理教育部认证所需资料众多且烦琐,所有材料您都必须提供原件,我们凭借丰富的经验,快捷的绿色通道帮您快速整合材料,让您少走弯路。
留信网认证的作用:
1:该专业认证可证明留学生真实身份
2:同时对留学生所学专业登记给予评定
3:国家专业人才认证中心颁发入库证书
4:这个认证书并且可以归档倒地方
5:凡事获得留信网入网的信息将会逐步更新到个人身份内,将在公安局网内查询个人身份证信息后,同步读取人才网入库信息
6:个人职称评审加20分
7:个人信誉贷款加10分
8:在国家人才网主办的国家网络招聘大会中纳入资料,供国家高端企业选择人才
【关于价格问题(保证一手价格)】
我们所定的价格是非常合理的,而且我们现在做得单子大多数都是代理和回头客户介绍的所以一般现在有新的单子 我给客户的都是第一手的代理价格,因为我想坦诚对待大家 不想跟大家在价格方面浪费时间
对于老客户或者被老客户介绍过来的朋友,我们都会适当给一些优惠。
ServiceNow CIS-ITSM Exam Dumps & Questions [2024]
• For a full set of 530+ questions. Go to
https://skillcertpro.com/product/servicenow-cis-itsm-exam-questions/
• SkillCertPro offers detailed explanations to each question which helps to understand the concepts better.
• It is recommended to score above 85% in SkillCertPro exams before attempting a real exam.
• SkillCertPro updates exam questions every 2 weeks.
• You will get life time access and life time free updates
• SkillCertPro assures 100% pass guarantee in first attempt.
Data Processing in PHP - PHPers 2024 Poznań
Slides from my talk at PHPers Summit 2024 in Poznań about processing data in PHP.
Recently uploaded (20)
Bridging the visual gap between cultural heritage and digital scholarship
Bridging the visual gap between cultural heritage and digital scholarship
2 December UAE National Day - United Arab Emirates
2 December UAE National Day - United Arab Emirates
The Intersection between Competition and Data Privacy – COLANGELO – June 2024...
The Intersection between Competition and Data Privacy – COLANGELO – June 2024...
The Intersection between Competition and Data Privacy – CAPEL – June 2024 OEC...
The Intersection between Competition and Data Privacy – CAPEL – June 2024 OEC...
The Intersection between Competition and Data Privacy – KEMP – June 2024 OECD...
The Intersection between Competition and Data Privacy – KEMP – June 2024 OECD...
Prsentation for VIVA Welike project 1semester.pptx
Prsentation for VIVA Welike project 1semester.pptx
Legislation And Regulations For Import, Manufacture,.pptx
Legislation And Regulations For Import, Manufacture,.pptx
Gamify it until you make it Improving Agile Development and Operations with ...
Gamify it until you make it Improving Agile Development and Operations with ...
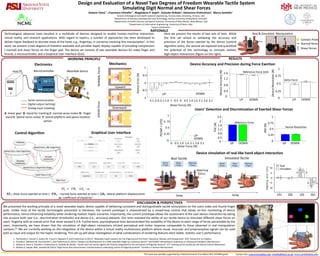
Swrs 2019
- 1. Contact Info: simone.toma@asu.edu, chinello@btech.au.dk, marco.santello@asu.edu 1. Pachierotti C, Sincalir S, Solazzi M, Frisoli A, Hayward V, and Prattichizzo D (2017) “Wearable haptic systems for the fingertip and the hand: Taxonomy, Review, and Perspectives” IEEE Transaction on Haptics. 2. Chinello F, Malvezzi M, Pacchierotti C, and Prattichizzo D (2015) “Design and development of a 3RRS wearable fingertip cutaneous device” IEEE/ASME International Conference on Advanced Intelligent Mechatronics 3. Shibata D, Toma S, Chinello F, Prattichizzo D, Santello M (2018). “Tactile and non-tactile signals are linearly integrated for the estimation of fingertip distance” 27th meeting of the Society for the Neural Control Movement 4. Shibata D, Kapper AML, Santello M (2014) “Digit forces bias sensorimotor transformations underlying control of fingertip position” Frontiers in Human Neuroscience Design and Evaluation of a Novel Two Degrees of Freedom Wearable Tactile System Simulating Digit Normal and Shear Forces Simone Toma1*, Francesco Chinello2*, Magdalena P. Gajek1, Daisuke Shibata4, Domenico Praticchizzo5, Marco Santello1 1School of Biological and Health Systems Engineering, Arizona State University, Arizona, USA 2Department of Business Development and Technology, Aarhus University, Midtjylland, Denmark 4 Department of Health Exercise and Sports Sciences, University of New Mexico, New Mexico, USA 5 Department of Information Engineering, University of Siena, Italy *equal contribution We presented the working principle of a novel wearable haptic device capable of delivering consistent and distinguishable tactile stimulations on the users index and thumb finger pads. Unlike most of the tactile technologies presented in literature, the current prototype is characterized by a closed-loop control that allows on-line monitoring of device performance, hence enhancing reliability while rendering realistic haptic scenarios. Importantly, the current prototype allows the assessment of the user-device interaction by taking into account both user (i.e., discrimination thresholds) and device (i.e., accuracy) datasets. Our tests revealed the ability of our tactile device to stimulate different shear forces on users’ fingertip with an overall error that never exceed 0.3 N. Furthermore, psychophysical tests demonstrated the suitability of the device to exert range of forces perceivable by the users. Importantly, we have shown that the simulation of digit-object interactions elicited perceptual and motor response comparable to those observed in real manipulation contexts.3,4 We are currently working on the integration of the device within a virtual reality multisensory platform where visual, muscular and proprioceptive signals can be used both as input and output for the haptic rendering. This set-up will allow investigation of what combinations of rendering features elicit stable, realistic user’s performance. Technological advances have resulted in a multitude of devices designed to enable human-machine interaction, virtual reality, and research applications. With regard to haptics, a number of approaches has been developed to deliver haptic feedback to discrete areas of the hand, e.g., fingertips, in scenarios involving fine manipulation1. In this work, we present a two-degrees-of-freedom wearable and portable haptic display capable of providing compression ( normal) and shear forces on the finger pad. The device set consists of two wearable devices for index finger and thumb, a microcontroller, and a Graphical User Interface (GUI). RATIONALE This work was partially supported by a National Science Foundation BCS-1455866 grant. Real & Simulated Manipulation Normal force Shear forces Contact Point Here we present the results of two sets of tests. While the first set aimed at validating the accuracy and precision of the forces exerted by the device (control algorithm tests), the second set explored and quantified the potential of this technology to simulate realistic digit-object interactions (figure on the right). Mechanics Device Accuracy and Precision during Force Exertion DISCUSSION & PERSPECTIVES RESULTSWORKING PRINCIPLE Device simulation of real-like hand object interaction Simulated Tactile time time Real Tactile Matching error UU DD UD DU A B C D E F A: linear gear B: stand for tracking C: normal servo motor D: finger stand E: lateral servo motor F: lateral platform and piezo-resistive sensor Serial communication Digital output (writing) Analog input (reading) NORMALForce Upward Downward SHEARForce Electronics Graphical User InterfaceControl Algorithm DeviceAccuracy(N) UP DOWN 0 0.4 0.8 1.2 1.6 UP DOWN DeviceResolution(N) 0 0.25 0.5 0.75 1 UP DOWN PSE(N) 0.5 2.4 0 1.6 Reference Force 1.2 0.8 2 JND(N) UP DOWN 0.25 0.75 1 0 0.5 Device Resolution Users’ Detection and Discrimination of Exerted Shear Forces P(CMP>STD) 0.25 0.5 0. 75 1 0 0 0.5 1.61.0 2.1 2.6 3.1 Shear Force (N) UP DOWN -1.6 -0.5 0 0.5 1.61.0 2.1 2.6 3.1-3.1-2.6-2.1 -1 Shear Forces (N) DOWNUP DeviceError(N) 1 -0.5 0.5 -1 0 Reference Force (std) Delta Force 𝑆𝐹𝑡 = 𝐹𝑁𝑡 ∙ 𝐿𝐷𝑡 ∙ 𝜔 𝑺𝑭 𝒕: shear force exerted at time t 𝑭𝑵 𝒕 : normal force exerted at time t 𝑳𝑫 𝒕: lateral platform displacement 𝝎: coefficient of elasticity2 Host PC MicroController Wearable device