HaREHABGloveRAD2016
•
0 likes•31 views
Approximately 800,000 people in the US have strokes each year, with 30-66% experiencing impaired hand function. A soft robotic rehabilitation glove has been developed to provide hand therapy through continuous passive motion and patient assisted movement. A study compared the range of motion of a human finger to a corresponding robotic digit, finding their ranges of motion to be in good agreement. Future work will modify the robotic glove design based on additional experimental data to optimize control parameters and accommodate human finger anatomical characteristics for clinical evaluation and hand therapy.
Report
Share
Report
Share
Download to read offline
Recommended
Automated MRI based 3D Joint Space Analysis
This document describes a study that evaluated a fully automated method for segmenting the femur, tibia, and patella from MRI scans of knees to analyze joint space width as a biomarker for osteoarthritis (OA). The method successfully segmented bones in 245 of 246 scans. Analysis found that joint space width correlated with clinical OA symptoms and change in joint space width correlated with change in symptoms. Future work will further analyze the full dataset and validate the automated method.
ECSS final poster
This study aimed to examine the applicability of ultrasonography (ULT) for estimating human muscle volume by comparing it to the gold standard of magnetic resonance imaging (MRI). The tibialis anterior muscle volume of 6 subjects was estimated using both ULT and MRI. ULT produced highly reproducible results but tended to underestimate volumes below 120cm3 and overestimate volumes above. Overall, ULT was found to be a valid and reproducible method for estimating volume in superficial muscles, though it was more time consuming than MRI and restricted to superficial muscles only. ULT may introduce a measurement error of around 7% for muscle volumes between 70-400cm3.
Local Hand Control for Tezpur University Bionic Hand Grasping
This document describes the development of a local hand control system for a biomimetic bionic hand called the Tezpur University Bionic Hand. The local hand control system uses kinematic and dynamic analysis to derive grasp primitives like finger joint angles and torques that allow the bionic hand to emulate different grasp types like the human hand. Simulation results showed the joint angles and velocities of the bionic hand fingers closely approximated those of human fingers. The local hand control provides an intuitive interface between higher-level grasp recognition and low-level actuation of the bionic hand motors.
Novel Approaches for Robotic Control Using Flex Sensor
The aim of the project is to develop the Prosthetic robotic hand using flex sensor for amputees. The main aim of the project is to develop the robotic hand that performs pick and place activities. Here we are using flex sensors to sense the signals from artificial hand signal is transmitted and that signal is used to drive the mechanical hand. Stroke is the third leading cause of the death. Nearly 7, 00,000 people suffered from stroke last year and 2/3 rd of them survived but were left with many number of disabilities; one such disability is upper extremity hemiplegia. If the hand and the arm do not have therapy immediately after stroke, it will lose its power and muscle control, resulting in a claw like appearance and loss of function. Activities of the patient, daily living activities will be significantly affected.Prosthetic hand must resemble human hand in size and shape and must perform like human hand.
L502027981
This document summarizes a research paper that proposes novel approaches for controlling robots using flex sensors. The paper describes designing an intelligent prosthetic hand that mimics natural human hand movements using flex sensors. The design process involved studying human hand motions and constraints of hand size. Initial proposals for control mechanisms included tension cables or pulleys at each joint. The final implementation involved mounting flex sensors to a data glove to control a mechanical hand wirelessly via a microcontroller. The hand was able to grasp and pick up objects by interpreting flex sensor bend values. The goal of the research was to develop a prosthetic hand that performed natural pick and place movements for amputees.
Swrs 2019
This document summarizes the design and evaluation of a novel two degree-of-freedom wearable tactile system that can simulate digit normal and shear forces. The system consists of two wearable devices for the index finger and thumb connected to a microcontroller and graphical user interface. Tests showed the device can exert different shear forces on the fingertips with errors under 0.3 N and forces perceptible to users. The system was also able to simulate realistic digit-object interactions comparable to real manipulation contexts. The device has potential for integration with virtual reality systems to enable multisensory feedback during human-machine interactions.
pres.1993.2.3.203.pdf
The document describes an optimized fingertip mapping (OFM) algorithm developed to transform human hand poses into robot hand poses for robotic hand teleoperation. The OFM algorithm maps both the positions and orientations of human fingertips to the robot fingers by minimizing errors between desired human fingertip goals and possible robot fingertip positions and orientations. It accounts for differences in fingertip workspaces between the human and robot hands using a priority-based mapping strategy that prioritizes human fingertip position goals over orientation goals. The OFM algorithm was implemented to teleoperate the Utah/MIT Dextrous Hand using a new hand master called the Utah Dextrous Hand Master.
Principal component analysis for the classification of fingers movement data ...
This document summarizes a research paper that uses principal component analysis (PCA) to classify finger movement data collected using a DataGlove called "GloveMAP". The paper aims to analyze human grasping features between the thumb, index, and middle fingers while grasping an object. PCA is used to reduce the dimensionality of the finger movement data and identify principal components that can distinguish between different finger movements. The experiment analyzes finger movement data from three fingers and shows that the first and second principal components allow distinguishing between different finger grasps and represent important features for object manipulation.
Recommended
Automated MRI based 3D Joint Space Analysis
This document describes a study that evaluated a fully automated method for segmenting the femur, tibia, and patella from MRI scans of knees to analyze joint space width as a biomarker for osteoarthritis (OA). The method successfully segmented bones in 245 of 246 scans. Analysis found that joint space width correlated with clinical OA symptoms and change in joint space width correlated with change in symptoms. Future work will further analyze the full dataset and validate the automated method.
ECSS final poster
This study aimed to examine the applicability of ultrasonography (ULT) for estimating human muscle volume by comparing it to the gold standard of magnetic resonance imaging (MRI). The tibialis anterior muscle volume of 6 subjects was estimated using both ULT and MRI. ULT produced highly reproducible results but tended to underestimate volumes below 120cm3 and overestimate volumes above. Overall, ULT was found to be a valid and reproducible method for estimating volume in superficial muscles, though it was more time consuming than MRI and restricted to superficial muscles only. ULT may introduce a measurement error of around 7% for muscle volumes between 70-400cm3.
Local Hand Control for Tezpur University Bionic Hand Grasping
This document describes the development of a local hand control system for a biomimetic bionic hand called the Tezpur University Bionic Hand. The local hand control system uses kinematic and dynamic analysis to derive grasp primitives like finger joint angles and torques that allow the bionic hand to emulate different grasp types like the human hand. Simulation results showed the joint angles and velocities of the bionic hand fingers closely approximated those of human fingers. The local hand control provides an intuitive interface between higher-level grasp recognition and low-level actuation of the bionic hand motors.
Novel Approaches for Robotic Control Using Flex Sensor
The aim of the project is to develop the Prosthetic robotic hand using flex sensor for amputees. The main aim of the project is to develop the robotic hand that performs pick and place activities. Here we are using flex sensors to sense the signals from artificial hand signal is transmitted and that signal is used to drive the mechanical hand. Stroke is the third leading cause of the death. Nearly 7, 00,000 people suffered from stroke last year and 2/3 rd of them survived but were left with many number of disabilities; one such disability is upper extremity hemiplegia. If the hand and the arm do not have therapy immediately after stroke, it will lose its power and muscle control, resulting in a claw like appearance and loss of function. Activities of the patient, daily living activities will be significantly affected.Prosthetic hand must resemble human hand in size and shape and must perform like human hand.
L502027981
This document summarizes a research paper that proposes novel approaches for controlling robots using flex sensors. The paper describes designing an intelligent prosthetic hand that mimics natural human hand movements using flex sensors. The design process involved studying human hand motions and constraints of hand size. Initial proposals for control mechanisms included tension cables or pulleys at each joint. The final implementation involved mounting flex sensors to a data glove to control a mechanical hand wirelessly via a microcontroller. The hand was able to grasp and pick up objects by interpreting flex sensor bend values. The goal of the research was to develop a prosthetic hand that performed natural pick and place movements for amputees.
Swrs 2019
This document summarizes the design and evaluation of a novel two degree-of-freedom wearable tactile system that can simulate digit normal and shear forces. The system consists of two wearable devices for the index finger and thumb connected to a microcontroller and graphical user interface. Tests showed the device can exert different shear forces on the fingertips with errors under 0.3 N and forces perceptible to users. The system was also able to simulate realistic digit-object interactions comparable to real manipulation contexts. The device has potential for integration with virtual reality systems to enable multisensory feedback during human-machine interactions.
pres.1993.2.3.203.pdf
The document describes an optimized fingertip mapping (OFM) algorithm developed to transform human hand poses into robot hand poses for robotic hand teleoperation. The OFM algorithm maps both the positions and orientations of human fingertips to the robot fingers by minimizing errors between desired human fingertip goals and possible robot fingertip positions and orientations. It accounts for differences in fingertip workspaces between the human and robot hands using a priority-based mapping strategy that prioritizes human fingertip position goals over orientation goals. The OFM algorithm was implemented to teleoperate the Utah/MIT Dextrous Hand using a new hand master called the Utah Dextrous Hand Master.
Principal component analysis for the classification of fingers movement data ...
This document summarizes a research paper that uses principal component analysis (PCA) to classify finger movement data collected using a DataGlove called "GloveMAP". The paper aims to analyze human grasping features between the thumb, index, and middle fingers while grasping an object. PCA is used to reduce the dimensionality of the finger movement data and identify principal components that can distinguish between different finger movements. The experiment analyzes finger movement data from three fingers and shows that the first and second principal components allow distinguishing between different finger grasps and represent important features for object manipulation.
Ataxic person prediction using feature optimized based on machine learning model
Ataxic gait monitoring and assessment of neurological disorders belong to important areas that are supported by digital signal processing methods and artificial intelligence (AI) techniques such as machine learning (ML) and deep learning (DL) techniques. This paper uses spatio-temporal data from Kinect sensor to optimize machine learning model to distinguish between ataxic and normal gait. Existing ML-based methodologies fails to establish feature correlation between different gait parameters; thus, exhibit very poor performance. Further, when data is imbalanced in nature the existing ML-based methodologies induces higher false positive. In addressing the research issues this paper introduces an extreme gradient boost (XGBoost)based classifier and enhanced feature optimization (EFO) by modifying the standard cross validation (SCV) mechanism. Experiment outcome shows the proposed ataxic person identification model achieves very good result in comparison with existing ML-based and DL-based ataxic person identification methodologies.
Estimation of Walking rate in Complex activity recognition
This document summarizes a study that investigated using a flexible conductive polymer sensor embedded in leggings to monitor knee movement and activity recognition. The sensor was connected to a wireless sensing node to collect data. Twelve subjects performed walking, running, and stair activities while wearing the smart leggings. Test-retest reliability of the sensor output range showed good to excellent reliability. Discrimination of activities was achieved using total power and median frequency features from the sensor signal, demonstrating over 90% accuracy. The system shows potential for assessing knee function during daily activities.
ROBOTICS IN TKR.pptx
1. Robotic total knee arthroplasty (TKA) uses preoperative imaging and intraoperative robotics to improve the accuracy of implant positioning and soft tissue balancing compared to conventional jig-based TKA.
2. Earlier robotic systems were associated with technical complications in up to 30% of cases, but complication rates with newer systems, such as Mako and Navio, appear to be low.
3. Robotic TKA systems can be classified as passive, active, interactive, or teleoperated based on their level of autonomy and interaction with the surgeon. The most widely used interactive systems currently are Mako, Navio, Rosa, and Cori.
Final report 1_ _1_
This document discusses the development of a low-cost prosthetic hand for people who have lost the use of their arm. It aims to design a hand that can perform basic grasping and holding functions through the sensing of muscle activity in the forearm. The system would use low-cost materials and motors to open and close soft prosthetic fingers similar to an umbrella opening and closing. This would provide an affordable alternative to existing high-cost prosthetics that use complex brain-signal control. The document reviews different types of existing prosthetic hands and the mechanics, electronics, and safety aspects considered in the design project.
A Review on Design and Modeling of Artificial Hand
This document provides a review of the design and modeling of artificial hands. It discusses several key points:
1) Artificial hands are typically made of lightweight materials like acrylic, aluminum, and iron. They include embedded systems, sensors, microcontrollers and actuators to enable grasping and gripping of objects.
2) Sensors like EMG and joint angle sensors provide feedback to microcontrollers to control servomotors and actuate finger movement. This allows the hands to grasp objects of different shapes and sizes.
3) Several studies discuss prototypes of prosthetic hands and gloves that use pneumatic muscles, links, and 3D printing to create lightweight dexterous designs controllable using EMG signals from the user's
Hand motion pattern recognition analysis of forearm muscle using MMG signals
Surface Mechanomyography (MMG) is the recording of mechanical activity of muscle tissue. MMG measures the mechanical signal (vibration of muscle) that generated from the muscles during contraction or relaxation action. It is widely used in various fields such as medical diagnosis, rehabilitation purpose and engineering applications. The main purpose of this research is to identify the hand gesture movement via VMG sensor (TSD250A) and classify them using Linear Discriminant Analysis (LDA). There are four channels MMG signal placed into adjacent muscles which PL-FCU and ED-ECU. The features used to feed the classifier to determine accuracy are mean absolute value, standard deviation, variance and root mean square. Most of subjects gave similar range of MMG signal of extraction values because of the adjacent muscle. The average accuracy of LDA is approximately 87.50% for the eight subjects. The finding of the result shows, MMG signal of adjacent muscle can affect the classification accuracy of the classifier.
Hand Gesture Recognition Using Statistical and Artificial Geometric Methods :...
Gesture recognition represents the silent language that can be done with robots as well as they done to us,
this overseas language ensures that everyone can understand the meaning of the gesturing as well as can
reply and interact with. Because of that this silent language has chosen for deaf people in which can make
their communication easier between each of them as well as with other people.
In this paper we have brought to the table two different outstanding gesture recognition systems, those two
techniques achieved high ratio of recognition percentage as well as that are invariant-free techniques,
especially rotation perturbation that hinders the achievement of high level recognition percentage, the first
method is the recognition of hand gesture with the help of dynamic circle template and second one using
variable length chromosome generic algorithm, these two methods has been applied to different people and
the main objective was to reduce the database size used for training.
STO prediction in Orthodontics by almuzian
1. There are several methods for predicting surgical outcomes of orthognathic surgery, including manual tracings, computer software programs, and video imaging.
2. Studies have found that current prediction methods tend to be inaccurate, especially in predicting soft tissue changes like lip and chin positions. Predictions often differ from actual outcomes by 2mm or more.
3. While prediction images can help communicate treatment plans to patients, they may also unintentionally create unrealistic expectations that are not always achieved. More accurate prediction methods are still needed.
Surgical Treatment Objective by Almuzian
1. There are several methods for predicting outcomes of orthognathic surgery, including manual tracings, computer programs, and 3D modeling.
2. Accuracy of prediction varies depending on the method and software used, with 3D modeling generally providing the most accurate predictions but manual methods still common.
3. Studies have found most software to be reasonably accurate for hard tissue predictions but with more variability for soft tissues like lips and less ability to account for individual patient differences.
I010145860
This document describes a proposed system for a hand gesture controlled robotic arm with haptic feedback for surgical applications. The system uses accelerometers and flex sensors in a glove to detect hand and finger movements, which are then used to wirelessly control the motion of a robotic arm. Force sensitive resistors are also included to provide haptic feedback to the user through vibrations when the robotic arm makes contact. The goal is to allow more intuitive control compared to pre-programmed or manually controlled systems, improving precision, flexibility and reducing costs for surgical robotics.
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
The paper presents the Inverse Kinematics (IK) close form derivation steps using combination of analytical
and geometric techniques for the UR robot. The innovative application of this work is used in the precise
positioning of puncture robotics system. The end effector is a puncture needle guide tube, which needs
precise positioning over the puncture insertion point. The IK closed form solutions bring out maximum 8
solutions represents 8 different robot joints configurations. These multiple solutions are helpful in the
puncture robotics system, it allow doctors to choose the most suitable configuration during the operation.
Therefore the workspace becomes more adequate for the coexistence of human and robot. Moreover IK
closed form solutions are more precise in positioning for medical puncture surgery compared to other
numerical methods. We include a performance evaluation for both of the IK obtained by the closed form
solution and by a numerical method.
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
The paper presents the Inverse Kinematics (IK) close form derivation steps using combination of analytical
and geometric techniques for the UR robot. The innovative application of this work is used in the precise
positioning of puncture robotics system. The end effector is a puncture needle guide tube, which needs
precise positioning over the puncture insertion point. The IK closed form solutions bring out maximum 8
solutions represents 8 different robot joints configurations. These multiple solutions are helpful in the
puncture robotics system, it allow doctors to choose the most suitable configuration during the operation.
Therefore the workspace becomes more adequate for the coexistence of human and robot. Moreover IK
closed form solutions are more precise in positioning for medical puncture surgery compared to other
numerical methods. We include a performance evaluation for both of the IK obtained by the closed form
solution and by a numerical method.
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
The paper presents the Inverse Kinematics (IK) close form derivation steps using combination of analytical
and geometric techniques for the UR robot. The innovative application of this work is used in the precise
positioning of puncture robotics system. The end effector is a puncture needle guide tube, which needs
precise positioning over the puncture insertion point. The IK closed form solutions bring out maximum 8
solutions represents 8 different robot joints configurations. These multiple solutions are helpful in the
puncture robotics system, it allow doctors to choose the most suitable configuration during the operation.
Therefore the workspace becomes more adequate for the coexistence of human and robot. Moreover IK
closed form solutions are more precise in positioning for medical puncture surgery compared to other
numerical methods. We include a performance evaluation for both of the IK obtained by the closed form
solution and by a numerical method.
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
The paper presents the Inverse Kinematics (IK) close form derivation steps using combination of analytical and geometric techniques for the UR robot. The innovative application of this work is used in the precise positioning of puncture robotics system. The end effector is a puncture needle guide tube, which needs precise positioning over the puncture insertion point. The IK closed form solutions bring out maximum 8 solutions represents 8 different robot joints configurations. These multiple solutions are helpful in the puncture robotics system, it allow doctors to choose the most suitable configuration during the operation. Therefore the workspace becomes more adequate for the coexistence of human and robot. Moreover IK closed form solutions are more precise in positioning for medical puncture surgery compared to other numerical methods. We include a performance evaluation for both of the IK obtained by the closed form solution and by a numerical method.
IRJET-V9I114.pdfA Review Paper on Economical Bionic Arm with Predefined Grasp...
The document is a review paper on developing an economical bionic arm. It discusses using technologies like 3D printing, EMG sensors, machine learning algorithms, and computer vision to improve the functionality of prosthetic arms while reducing costs. It summarizes several previous studies that used these technologies, including arms controlled via EMG signals and machine learning classifiers or using computer vision for object detection and control. The goal is to develop a low-cost prosthetic arm that provides multifunctional movement and feels natural to the user.
ME547 FInal Report
This document presents the methods for a project modeling human gait using forward and inverse dynamics. It describes creating a 3-body model of the leg consisting of thigh, shank, and foot segments. Kinematic data from Winter et al. will be used to calculate joint positions, velocities and accelerations over the gait cycle. Forward dynamics will be used to model joint torques and forces during gait. Inverse dynamics will then calculate internal joint forces and stresses will be analyzed through finite element analysis. The objectives are to model both a human leg and prosthetic leg, compare their kinematics, forces and validate the results with literature to better understand discrepancies between natural and prosthetic gait.
Important Parameters for Hand Function Assessment of Stroke Patients
Clinical scales such as Fugl-Meyer Assessment and Motor Assessment Scale are widely used to evaluate stroke patient's motor performance. However, the scoring systems of these assessments provide only rough estimation, making it difficult to objectively quantify impairment and disability or even rehabilitation progress throughout their rehabilitation period. In contrast, robot-based assessments are objective, repeatable, and could potentially reduce the assessment time. However, robot-based assessment scales are not as well established as conventional assessment scale and the correlation to conventional assessment scale is unclear. This paper discusses the important parameters in order to assess the hand function of stroke patients. This knowledge will provide a contribution to the development of a new robot-based assessment device effectively by including the important parameters in the device. The important parameters were included in development of iRest and yielded promising results that illustrate the potential of the important parameters in assessing the hand function of stroke patients.
Classification of finger grasping by using pca based on best matching unit b...
This document summarizes a research paper that proposes a method to classify finger grasping movements using principal component analysis (PCA) and best matching unit (BMU) approach. The researchers collected finger movement data using a low-cost data glove with flex sensors on the fingers. PCA was used to extract features and reduce the dimensionality of the dataset. The BMU approach and Euclidean distance were then used to group the finger movement features into clusters based on the best matching neuron. The results showed the first two principal components could distinguish between movements of the thumb, index and middle fingers when grasping objects. This clustering method provides a way to analyze finger grasping patterns without dependence on hand size.
LowerLimbsRehabilitation
This document proposes an algorithm to calculate angles of the lower limbs using inertial measurement units (IMUs) placed on the lower back, calves, and thighs while a patient performs an overhead squat exercise. The algorithm was tested on patients and compared theoretical measurements to experimental measurements from the IMUs. Error rates were low, ranging from 0.95-10.11% for different joints, showing the potential of using IMU sensors to help physical therapists evaluate rehabilitation exercises more efficiently.
IRJET- Device Designed for Fabrication of Finger Rehabilitation along with Vi...
1) The document describes a virtual reality-enhanced hand rehabilitation support system that uses a master-slave motion assistant to allow independent rehabilitation exercises.
2) The system tracks finger motion virtually and encourages patients to move their fingers along with an animation. It analyzes the stiffness and intensity of a patient's stroke to understand finger mobility and provide tailored animations.
3) Patients are grouped based on tests of stiffness, time since stroke, impact intensity or brain dysfunction to provide personalized rehabilitation programs.
More Related Content
Similar to HaREHABGloveRAD2016
Ataxic person prediction using feature optimized based on machine learning model
Ataxic gait monitoring and assessment of neurological disorders belong to important areas that are supported by digital signal processing methods and artificial intelligence (AI) techniques such as machine learning (ML) and deep learning (DL) techniques. This paper uses spatio-temporal data from Kinect sensor to optimize machine learning model to distinguish between ataxic and normal gait. Existing ML-based methodologies fails to establish feature correlation between different gait parameters; thus, exhibit very poor performance. Further, when data is imbalanced in nature the existing ML-based methodologies induces higher false positive. In addressing the research issues this paper introduces an extreme gradient boost (XGBoost)based classifier and enhanced feature optimization (EFO) by modifying the standard cross validation (SCV) mechanism. Experiment outcome shows the proposed ataxic person identification model achieves very good result in comparison with existing ML-based and DL-based ataxic person identification methodologies.
Estimation of Walking rate in Complex activity recognition
This document summarizes a study that investigated using a flexible conductive polymer sensor embedded in leggings to monitor knee movement and activity recognition. The sensor was connected to a wireless sensing node to collect data. Twelve subjects performed walking, running, and stair activities while wearing the smart leggings. Test-retest reliability of the sensor output range showed good to excellent reliability. Discrimination of activities was achieved using total power and median frequency features from the sensor signal, demonstrating over 90% accuracy. The system shows potential for assessing knee function during daily activities.
ROBOTICS IN TKR.pptx
1. Robotic total knee arthroplasty (TKA) uses preoperative imaging and intraoperative robotics to improve the accuracy of implant positioning and soft tissue balancing compared to conventional jig-based TKA.
2. Earlier robotic systems were associated with technical complications in up to 30% of cases, but complication rates with newer systems, such as Mako and Navio, appear to be low.
3. Robotic TKA systems can be classified as passive, active, interactive, or teleoperated based on their level of autonomy and interaction with the surgeon. The most widely used interactive systems currently are Mako, Navio, Rosa, and Cori.
Final report 1_ _1_
This document discusses the development of a low-cost prosthetic hand for people who have lost the use of their arm. It aims to design a hand that can perform basic grasping and holding functions through the sensing of muscle activity in the forearm. The system would use low-cost materials and motors to open and close soft prosthetic fingers similar to an umbrella opening and closing. This would provide an affordable alternative to existing high-cost prosthetics that use complex brain-signal control. The document reviews different types of existing prosthetic hands and the mechanics, electronics, and safety aspects considered in the design project.
A Review on Design and Modeling of Artificial Hand
This document provides a review of the design and modeling of artificial hands. It discusses several key points:
1) Artificial hands are typically made of lightweight materials like acrylic, aluminum, and iron. They include embedded systems, sensors, microcontrollers and actuators to enable grasping and gripping of objects.
2) Sensors like EMG and joint angle sensors provide feedback to microcontrollers to control servomotors and actuate finger movement. This allows the hands to grasp objects of different shapes and sizes.
3) Several studies discuss prototypes of prosthetic hands and gloves that use pneumatic muscles, links, and 3D printing to create lightweight dexterous designs controllable using EMG signals from the user's
Hand motion pattern recognition analysis of forearm muscle using MMG signals
Surface Mechanomyography (MMG) is the recording of mechanical activity of muscle tissue. MMG measures the mechanical signal (vibration of muscle) that generated from the muscles during contraction or relaxation action. It is widely used in various fields such as medical diagnosis, rehabilitation purpose and engineering applications. The main purpose of this research is to identify the hand gesture movement via VMG sensor (TSD250A) and classify them using Linear Discriminant Analysis (LDA). There are four channels MMG signal placed into adjacent muscles which PL-FCU and ED-ECU. The features used to feed the classifier to determine accuracy are mean absolute value, standard deviation, variance and root mean square. Most of subjects gave similar range of MMG signal of extraction values because of the adjacent muscle. The average accuracy of LDA is approximately 87.50% for the eight subjects. The finding of the result shows, MMG signal of adjacent muscle can affect the classification accuracy of the classifier.
Hand Gesture Recognition Using Statistical and Artificial Geometric Methods :...
Gesture recognition represents the silent language that can be done with robots as well as they done to us,
this overseas language ensures that everyone can understand the meaning of the gesturing as well as can
reply and interact with. Because of that this silent language has chosen for deaf people in which can make
their communication easier between each of them as well as with other people.
In this paper we have brought to the table two different outstanding gesture recognition systems, those two
techniques achieved high ratio of recognition percentage as well as that are invariant-free techniques,
especially rotation perturbation that hinders the achievement of high level recognition percentage, the first
method is the recognition of hand gesture with the help of dynamic circle template and second one using
variable length chromosome generic algorithm, these two methods has been applied to different people and
the main objective was to reduce the database size used for training.
STO prediction in Orthodontics by almuzian
1. There are several methods for predicting surgical outcomes of orthognathic surgery, including manual tracings, computer software programs, and video imaging.
2. Studies have found that current prediction methods tend to be inaccurate, especially in predicting soft tissue changes like lip and chin positions. Predictions often differ from actual outcomes by 2mm or more.
3. While prediction images can help communicate treatment plans to patients, they may also unintentionally create unrealistic expectations that are not always achieved. More accurate prediction methods are still needed.
Surgical Treatment Objective by Almuzian
1. There are several methods for predicting outcomes of orthognathic surgery, including manual tracings, computer programs, and 3D modeling.
2. Accuracy of prediction varies depending on the method and software used, with 3D modeling generally providing the most accurate predictions but manual methods still common.
3. Studies have found most software to be reasonably accurate for hard tissue predictions but with more variability for soft tissues like lips and less ability to account for individual patient differences.
I010145860
This document describes a proposed system for a hand gesture controlled robotic arm with haptic feedback for surgical applications. The system uses accelerometers and flex sensors in a glove to detect hand and finger movements, which are then used to wirelessly control the motion of a robotic arm. Force sensitive resistors are also included to provide haptic feedback to the user through vibrations when the robotic arm makes contact. The goal is to allow more intuitive control compared to pre-programmed or manually controlled systems, improving precision, flexibility and reducing costs for surgical robotics.
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
The paper presents the Inverse Kinematics (IK) close form derivation steps using combination of analytical
and geometric techniques for the UR robot. The innovative application of this work is used in the precise
positioning of puncture robotics system. The end effector is a puncture needle guide tube, which needs
precise positioning over the puncture insertion point. The IK closed form solutions bring out maximum 8
solutions represents 8 different robot joints configurations. These multiple solutions are helpful in the
puncture robotics system, it allow doctors to choose the most suitable configuration during the operation.
Therefore the workspace becomes more adequate for the coexistence of human and robot. Moreover IK
closed form solutions are more precise in positioning for medical puncture surgery compared to other
numerical methods. We include a performance evaluation for both of the IK obtained by the closed form
solution and by a numerical method.
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
The paper presents the Inverse Kinematics (IK) close form derivation steps using combination of analytical
and geometric techniques for the UR robot. The innovative application of this work is used in the precise
positioning of puncture robotics system. The end effector is a puncture needle guide tube, which needs
precise positioning over the puncture insertion point. The IK closed form solutions bring out maximum 8
solutions represents 8 different robot joints configurations. These multiple solutions are helpful in the
puncture robotics system, it allow doctors to choose the most suitable configuration during the operation.
Therefore the workspace becomes more adequate for the coexistence of human and robot. Moreover IK
closed form solutions are more precise in positioning for medical puncture surgery compared to other
numerical methods. We include a performance evaluation for both of the IK obtained by the closed form
solution and by a numerical method.
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
The paper presents the Inverse Kinematics (IK) close form derivation steps using combination of analytical
and geometric techniques for the UR robot. The innovative application of this work is used in the precise
positioning of puncture robotics system. The end effector is a puncture needle guide tube, which needs
precise positioning over the puncture insertion point. The IK closed form solutions bring out maximum 8
solutions represents 8 different robot joints configurations. These multiple solutions are helpful in the
puncture robotics system, it allow doctors to choose the most suitable configuration during the operation.
Therefore the workspace becomes more adequate for the coexistence of human and robot. Moreover IK
closed form solutions are more precise in positioning for medical puncture surgery compared to other
numerical methods. We include a performance evaluation for both of the IK obtained by the closed form
solution and by a numerical method.
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
The paper presents the Inverse Kinematics (IK) close form derivation steps using combination of analytical and geometric techniques for the UR robot. The innovative application of this work is used in the precise positioning of puncture robotics system. The end effector is a puncture needle guide tube, which needs precise positioning over the puncture insertion point. The IK closed form solutions bring out maximum 8 solutions represents 8 different robot joints configurations. These multiple solutions are helpful in the puncture robotics system, it allow doctors to choose the most suitable configuration during the operation. Therefore the workspace becomes more adequate for the coexistence of human and robot. Moreover IK closed form solutions are more precise in positioning for medical puncture surgery compared to other numerical methods. We include a performance evaluation for both of the IK obtained by the closed form solution and by a numerical method.
IRJET-V9I114.pdfA Review Paper on Economical Bionic Arm with Predefined Grasp...
The document is a review paper on developing an economical bionic arm. It discusses using technologies like 3D printing, EMG sensors, machine learning algorithms, and computer vision to improve the functionality of prosthetic arms while reducing costs. It summarizes several previous studies that used these technologies, including arms controlled via EMG signals and machine learning classifiers or using computer vision for object detection and control. The goal is to develop a low-cost prosthetic arm that provides multifunctional movement and feels natural to the user.
ME547 FInal Report
This document presents the methods for a project modeling human gait using forward and inverse dynamics. It describes creating a 3-body model of the leg consisting of thigh, shank, and foot segments. Kinematic data from Winter et al. will be used to calculate joint positions, velocities and accelerations over the gait cycle. Forward dynamics will be used to model joint torques and forces during gait. Inverse dynamics will then calculate internal joint forces and stresses will be analyzed through finite element analysis. The objectives are to model both a human leg and prosthetic leg, compare their kinematics, forces and validate the results with literature to better understand discrepancies between natural and prosthetic gait.
Important Parameters for Hand Function Assessment of Stroke Patients
Clinical scales such as Fugl-Meyer Assessment and Motor Assessment Scale are widely used to evaluate stroke patient's motor performance. However, the scoring systems of these assessments provide only rough estimation, making it difficult to objectively quantify impairment and disability or even rehabilitation progress throughout their rehabilitation period. In contrast, robot-based assessments are objective, repeatable, and could potentially reduce the assessment time. However, robot-based assessment scales are not as well established as conventional assessment scale and the correlation to conventional assessment scale is unclear. This paper discusses the important parameters in order to assess the hand function of stroke patients. This knowledge will provide a contribution to the development of a new robot-based assessment device effectively by including the important parameters in the device. The important parameters were included in development of iRest and yielded promising results that illustrate the potential of the important parameters in assessing the hand function of stroke patients.
Classification of finger grasping by using pca based on best matching unit b...
This document summarizes a research paper that proposes a method to classify finger grasping movements using principal component analysis (PCA) and best matching unit (BMU) approach. The researchers collected finger movement data using a low-cost data glove with flex sensors on the fingers. PCA was used to extract features and reduce the dimensionality of the dataset. The BMU approach and Euclidean distance were then used to group the finger movement features into clusters based on the best matching neuron. The results showed the first two principal components could distinguish between movements of the thumb, index and middle fingers when grasping objects. This clustering method provides a way to analyze finger grasping patterns without dependence on hand size.
LowerLimbsRehabilitation
This document proposes an algorithm to calculate angles of the lower limbs using inertial measurement units (IMUs) placed on the lower back, calves, and thighs while a patient performs an overhead squat exercise. The algorithm was tested on patients and compared theoretical measurements to experimental measurements from the IMUs. Error rates were low, ranging from 0.95-10.11% for different joints, showing the potential of using IMU sensors to help physical therapists evaluate rehabilitation exercises more efficiently.
IRJET- Device Designed for Fabrication of Finger Rehabilitation along with Vi...
1) The document describes a virtual reality-enhanced hand rehabilitation support system that uses a master-slave motion assistant to allow independent rehabilitation exercises.
2) The system tracks finger motion virtually and encourages patients to move their fingers along with an animation. It analyzes the stiffness and intensity of a patient's stroke to understand finger mobility and provide tailored animations.
3) Patients are grouped based on tests of stiffness, time since stroke, impact intensity or brain dysfunction to provide personalized rehabilitation programs.
Similar to HaREHABGloveRAD2016 (20)
Ataxic person prediction using feature optimized based on machine learning model
Ataxic person prediction using feature optimized based on machine learning model
Estimation of Walking rate in Complex activity recognition
Estimation of Walking rate in Complex activity recognition
A Review on Design and Modeling of Artificial Hand
A Review on Design and Modeling of Artificial Hand
Hand motion pattern recognition analysis of forearm muscle using MMG signals
Hand motion pattern recognition analysis of forearm muscle using MMG signals
Hand Gesture Recognition Using Statistical and Artificial Geometric Methods :...
Hand Gesture Recognition Using Statistical and Artificial Geometric Methods :...
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
MULTIPLE CONFIGURATIONS FOR PUNCTURING ROBOT POSITIONING
IRJET-V9I114.pdfA Review Paper on Economical Bionic Arm with Predefined Grasp...
IRJET-V9I114.pdfA Review Paper on Economical Bionic Arm with Predefined Grasp...
Important Parameters for Hand Function Assessment of Stroke Patients
Important Parameters for Hand Function Assessment of Stroke Patients
Classification of finger grasping by using pca based on best matching unit b...
Classification of finger grasping by using pca based on best matching unit b...
IRJET- Device Designed for Fabrication of Finger Rehabilitation along with Vi...
IRJET- Device Designed for Fabrication of Finger Rehabilitation along with Vi...
HaREHABGloveRAD2016
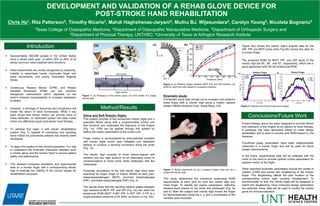
- 1. Conclusions/Future Work v Approximately 800,000 people in the United States have a stroke each year, of which 30% to 66% of all stroke survivors have impaired hand functions. v Hand impairments are mostly recognized by spasticity, inability to open/close hands, inaccurate finger and hand movements, and poorly modulated fingertip forces. v Continuous Passive Motion (CPM), and Patient Assisted Movement (PAM) are two common therapeutic interventions which capitalize on the brain’s inherent neuroplasticity to increase adaptation to stroke. v However, a shortage of resources and compliance will hinder the return of hand functionality. While it has been shown that robotic motion can provide many of these attributes, no dedicated system has been made which can effectively apply post-stroke hand therapy. v To address this need, a soft robotic rehabilitation system (Fig. 1) capable of monitoring and assisting hand motion for post-stroke patients has recently been developed. v To apply this system to the clinical population, it is vital to understand the kinematic interaction between such a robotic glove and the human hand to ensure patient safety and performance. v This abstract compares simulation and experimental data on a human finger with a corresponding robotic digit to evaluate the viability of the current design for rehabilitation purposes. Figure 4(a) shows the robotic digit’s angular data for the DIP, PIP and MCP joints while Fig 4(b) shows this data for a human finger. The achieved ROM for MCP, PIP, and DIP joints of the robotic digit are 85˚, 96˚, and 53˚, respectively, which are in good agreement with the full anatomical ROM. Figure 1: (a) Prototype of the robotic glove, (b) CAD model of a single robotic digit. Introduction Method/Results DEVELOPMENT AND VALIDATION OF A REHAB GLOVE DEVICE FOR POST-STROKE HAND REHABILITATION Chris Ha1, Rita Patterson2, Timothy Nicaris3, Mahdi Haghshenas-Jaryani4, Muthu BJ. Wijesundara4, Carolyn Young5, Nicoleta Bugnariu5 1Texas College of Osteopathic Medicine, 2Department of Osteopathic Manipulative Medicine, 3Department of Orthopedic Surgery and 5Department of Physical Therapy, UNTHSC; 4University of Texas at Arlington Research Institute Glove and Soft Robotic Digits: This system consists of five sensorized robotic digits and a wearable fixture along with a programmable control unit that monitors and modulates the trajectory of the fingers (Fig. 1a). CPM can be applied through this system by setting the motion parameters of the control unit. Finger motion is accomplished by pneumatically actuated soft robotic digits which uses inflatable and deflatable bellows to produce a bending movement along the joints (Fig. 1b). The robotic digit consists of three bellow-shaped soft sections and four rigid sections (in an alternative order) in correspondence to three joints, three phalanges with the metacarpal. Computer simulations of the soft robotic digit have been examined for finger range of motion (ROM) at each joint: metacarpophalangeal (MCP), proximal interphalangeal (PIP), and distal interphalangeal (DIP) (Fig. 2). The results show that the resulting relative angles between rigid sections at MCP, PIP, and DIP (Fig. 2a) can reach full anatomical ROM (MCP: 0-90º; PIP: 0-100º, DIP: 0-70º at a single actuation pressure of 24.3kPa, as shown in Fig. 2(b). Figure 2: (a) Relative angles between MCP, PIP, and DIP sections, (b) ROM for each joint with respect to actuation pressure. Kinematic study: A kinematic study was carried out to compare one subject’s index finger with a robotic digit using a motion capture system (Motion Analysis Corp, Santa Rosa, CA). Figure 3: Marker placement on (a) a subject’s finger index and (b) a single soft robotic digit. (a) (b) Figure 4: Robotic and Human finger joint angles. This study determined the functional anatomical ROM requirements at each joint for both the robotic digit and index finger. To identify the motion parameters, reflective markers were placed on the joints and phalanges (Fig. 3a and b). Both the subject and robotic digit moved the finger for flexion/extension while the x, y, and z coordinates of the markers were recorded. A hand therapy glove has been designed to provide flexion and extension of the fingers as an adjunct to hand therapy. A prototype has been fabricated based on initial design parameters and is able to provide joint ROM based on the literature. Functional grasp parameters have been experimentally measured in a human finger and will be used for future design improvements. In the future, experimental data will be collected with the robot on the hand to provide optimal control parameters for passive motion of the digits. Other important kinematic parameters include the center of rotation (COR) and dorsal skin lengthening of the human finger. This lengthening effects the joint location of the corresponding robotic digit, causing misalignment. To accommodate for this, the robotic digits will be designed to match this lengthening. Once improved design parameters are obtained, these data will be used to modify the robotic glove for clinical evaluation.