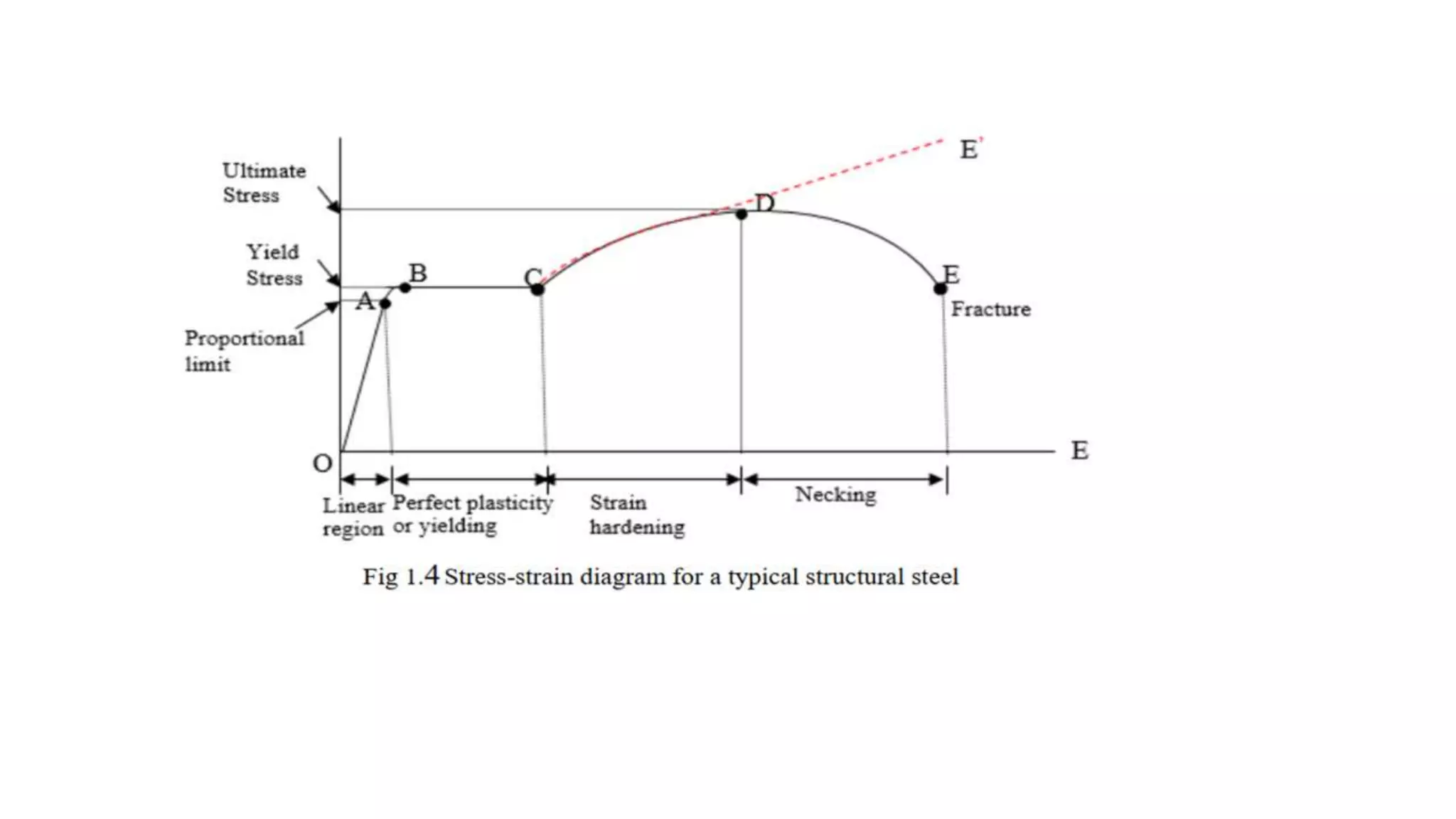
Linear elasticity and Hooke's law relate stress and strain in materials. Hooke's law states that within a material's proportional limit, stress is directly proportional to strain. Poisson's ratio describes the ratio of lateral to axial strain in materials undergoing tension or compression. When loads are applied to structures, their stresses must not exceed allowable stress levels to avoid failure.