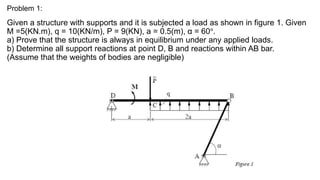
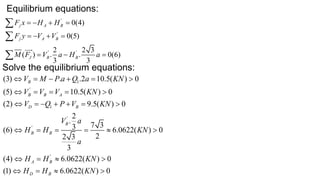
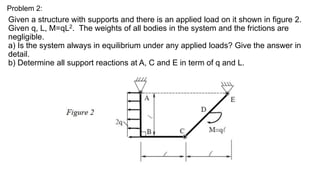
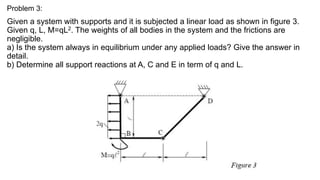
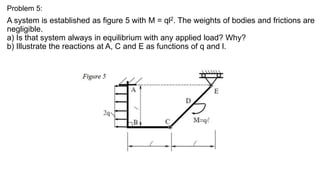
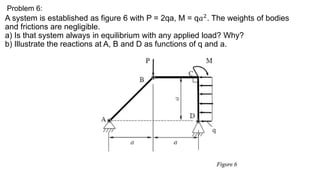
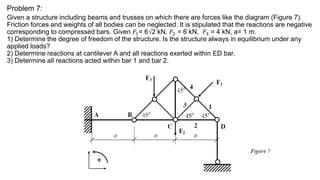
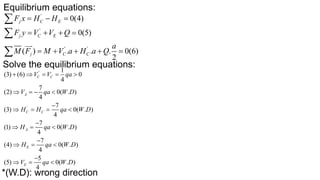
This document contains the homework submission of student Tran Quoc Thai for the Engineering Mechanics course. It includes 6 problems solving statics analysis of different structures. The student provides the free body diagrams, equilibrium equations, and solutions for the support reactions and internal forces of each structure when subjected to various loads.