The document discusses various techniques for modern software testing and formal verification, including:
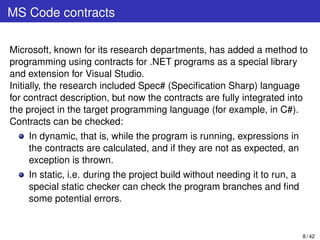
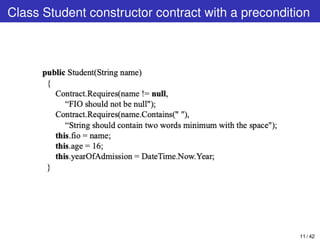
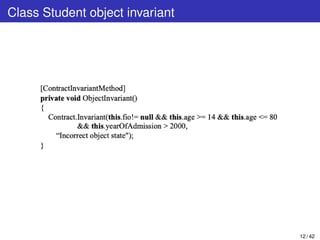
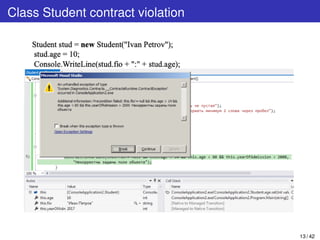
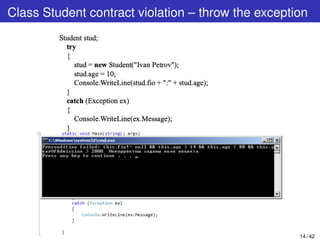
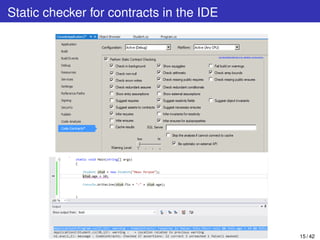
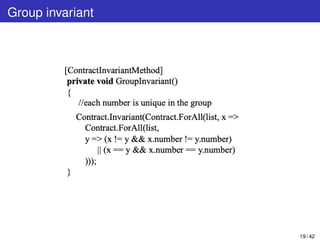
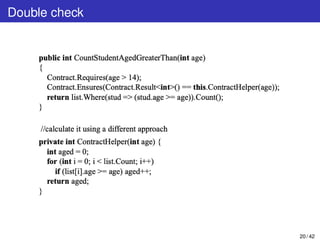
1. Design-by-contract using pre-conditions, post-conditions, and invariants as implemented in languages like Eiffel and tools like Microsoft Code Contracts for .NET programs.
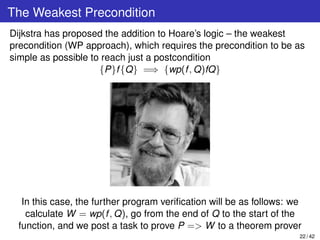
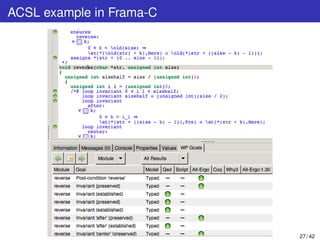
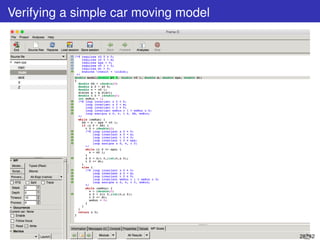
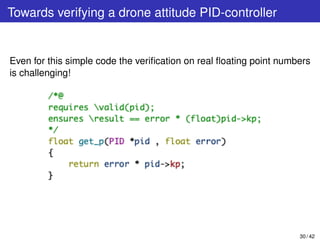
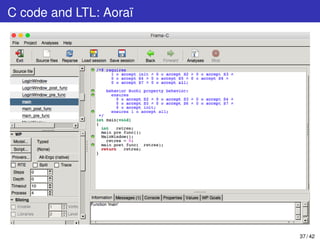
2. Deductive verification of C code using the Frama-C tool based on annotations and the weakest precondition approach.
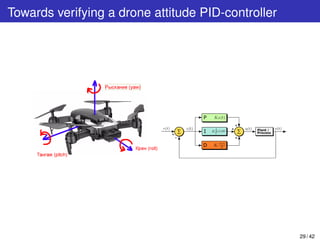
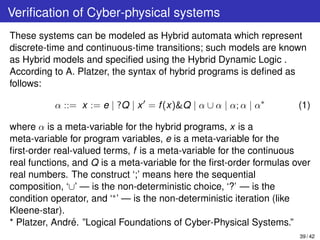
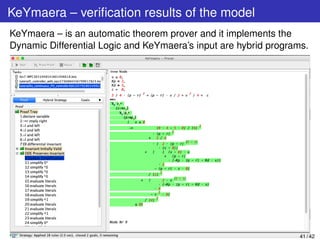
3. Verification of cyber-physical systems modeled as hybrid automata using techniques like the KeYmaera theorem prover based on hybrid logic.


![Design-By-Contract
Well-known forms:
{P}C{Q}
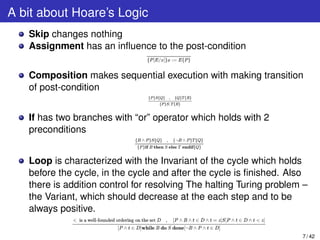
P =⇒ [C]Q
where P – precondition, C – code, Q – postcondition. Invariant is a
form of a global pre- and post- condition {I}C{I}
In OOP languages:
Pre- and Post- conditions are specified for methods
Invariant is specified for the whole class
Also, for loops Loop Invariants and Loop Variant are specified
The things can be specified:
As a part of language syntax (Eiffel)
In comments (Frama-C)
In annotations and special code (MS Code contracts)
5 / 42](https://image.slidesharecdn.com/staroletovcontractscyber-191226060112/85/Staroletov-Design-by-Contract-verification-of-Cyber-physical-systems-5-320.jpg)
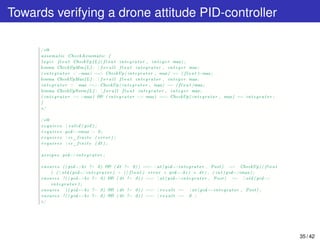
 (2)
Then, we decompose the system into precondition, continuous
PD-controller and requirements. Precondition:
init :== v ≥ 0 ∧ c > 0 ∧ Kp = 2 ∧ Kd = 3 ∧ V(p, pr , v) < c (3)
The continuous state:
controller :== p = v, v = −Kp · (p − pr ) − Kd · v (4)
As the requirement it is proposed to try stability using Lyapunov
method:
req :== V(p, pr , v) < c (5)
V(p, pr , v) = 5/4 · (p − pr )2
+ (p − pr ) · v/2 + v2
/4 (6)
*Quesel et al.: How to Model and Prove Hybrid Systems with
KeYmaera
40 / 42](https://image.slidesharecdn.com/staroletovcontractscyber-191226060112/85/Staroletov-Design-by-Contract-verification-of-Cyber-physical-systems-40-320.jpg)






































![Formal Methods: Whence and Whither? [Martin Fränzle Festkolloquium, 2025]](https://cdn.slidesharecdn.com/ss_thumbnails/mf2025-250305164811-a0930761-thumbnail.jpg?width=640&height=640&fit=bounds)






























