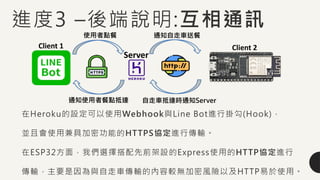
该文档是关于一家防疫旅馆自动送餐车的期末专题报告,介绍了系统的模块开发、循迹功能以及车上模块的设置。报告详细说明了使用的硬件和软件技术,包括ESP32芯片的优势,以及如何通过LINE Bot进行点餐。项目目前的进度涵盖了服务器架设、数据库存取和自走车与使用者之间的通讯。










![進度1 – 循跡功能具體實踐1
使用2階陣列存取所有地上可能標記,比對TCRT5000之感應結果後,移動車輛。
const int code [32][5] = {
{0, 0, 0, 0, 0), //0
{0, 0, 0, 0, 1}, //1
{0, 0, 0, 1, 0} //2
{0, 0, 0, 1, 1}, //3
{0, 0, 1, 0, 0}, //4
{0, 0, 1, 0, 1}, //5
{0, 0, 1, 1, 0}, //6
{0, 0, 1, 1, 1}, //7
{0, 1, 0, 0, 0}, //8
{0, 1, 0, 0, 1}, //9
{0, 1, 0, 1, 0}, //10 一號房
{0, 1, 0, 1, 1}, //11
{0, 1, 1, 0, 0} //12
{0, 1, 1, 0, 1}, //13
{0, 1, 1, 1, 0}, //14
{0, 1, 1, 1, 1}, //15
{1, 0, 0, 0, 0}, //16 二號房
{1, 0, 0, 0, 1}, //17
{1, 0, 0, 1, 0}, //18
{1, 0, 0, 1, 1}, //19
{1, 0, 1, 0, 0}, //20
{1, 0, 1, 0, 1}, //21
{1, 0, 1, 1, 0}, //22
{1, 0, 1, 1, 1}, //23
{1, 1, 0, 0, 0}, //24
{1, 1, 0, 0, 1}, //25
{1, 1, 0, 1, 0}, //26
{1, 1, 0, 1, 1}, //27 forward
{1, 1, 1, 0, 0}, //28 {
{1, 1, 1, 0, 1}, //29
{1, 1, 1, 1, 0}, //30
{1, 1, 1, 1, 1}, //31 stop or
start
};](https://image.slidesharecdn.com/26gif-220119210352/85/slide-11-320.jpg)




























![電路學 - [第四章] 儲能元件](https://cdn.slidesharecdn.com/ss_thumbnails/circuitch4-150613063008-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)