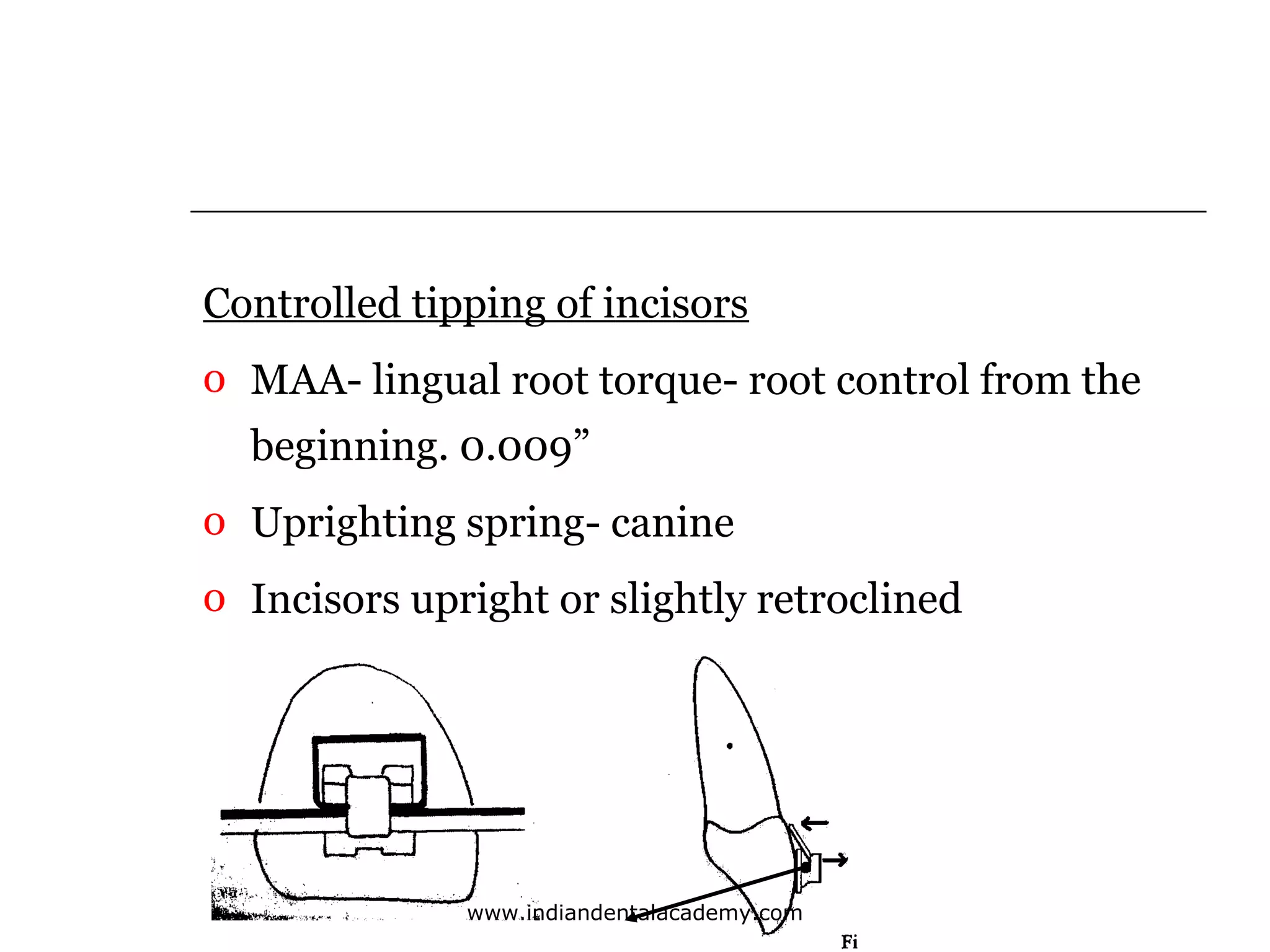
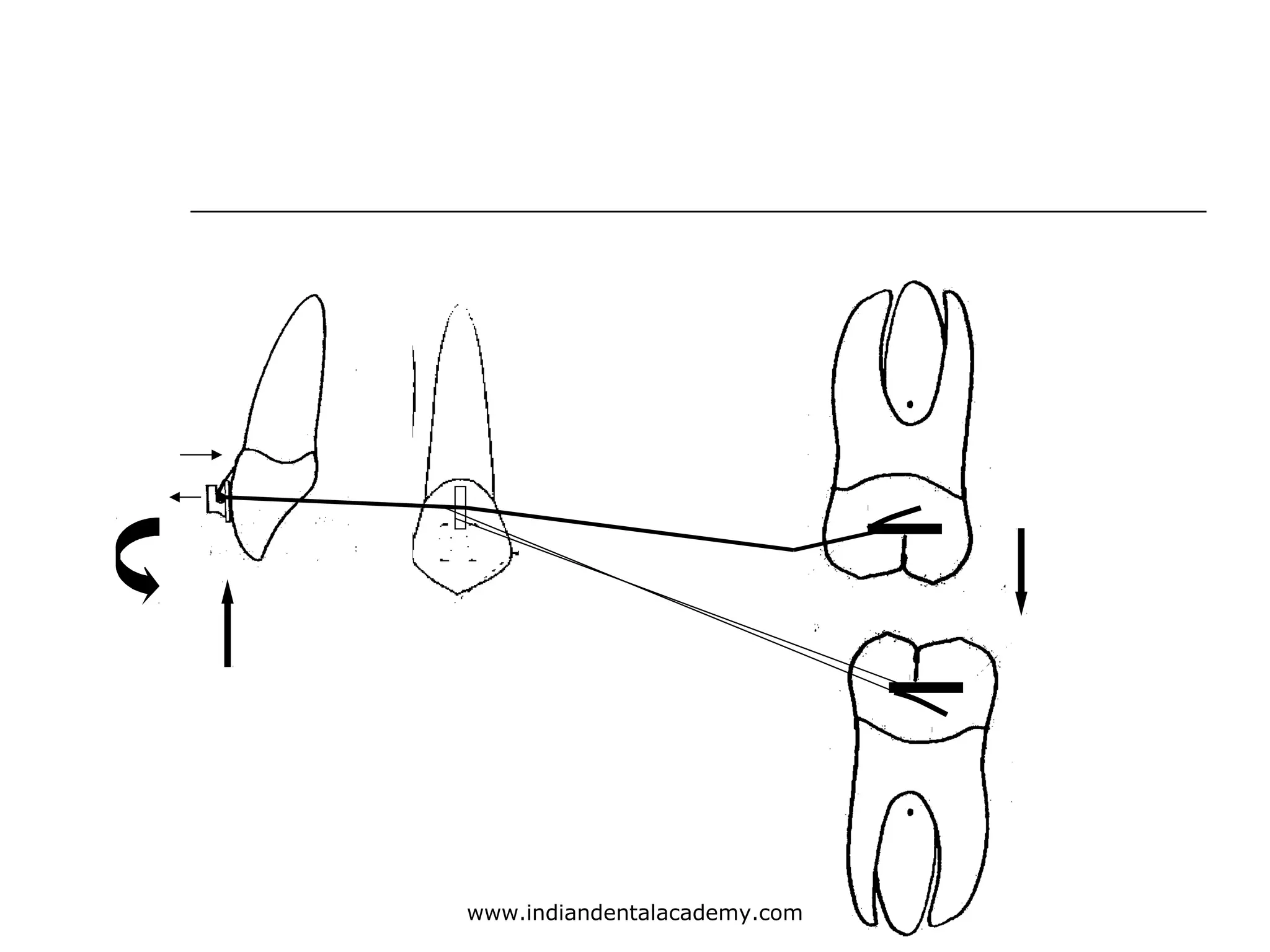

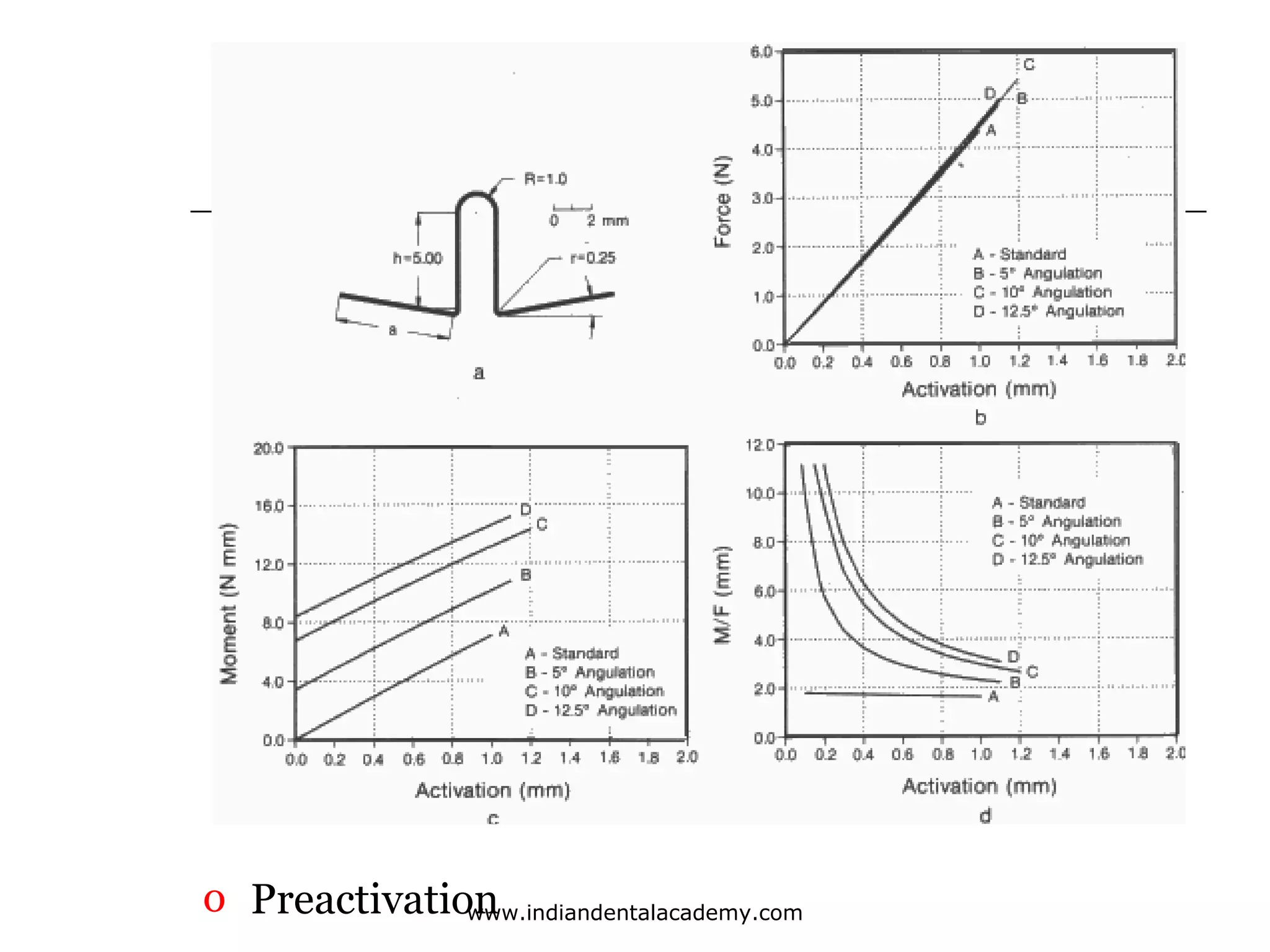
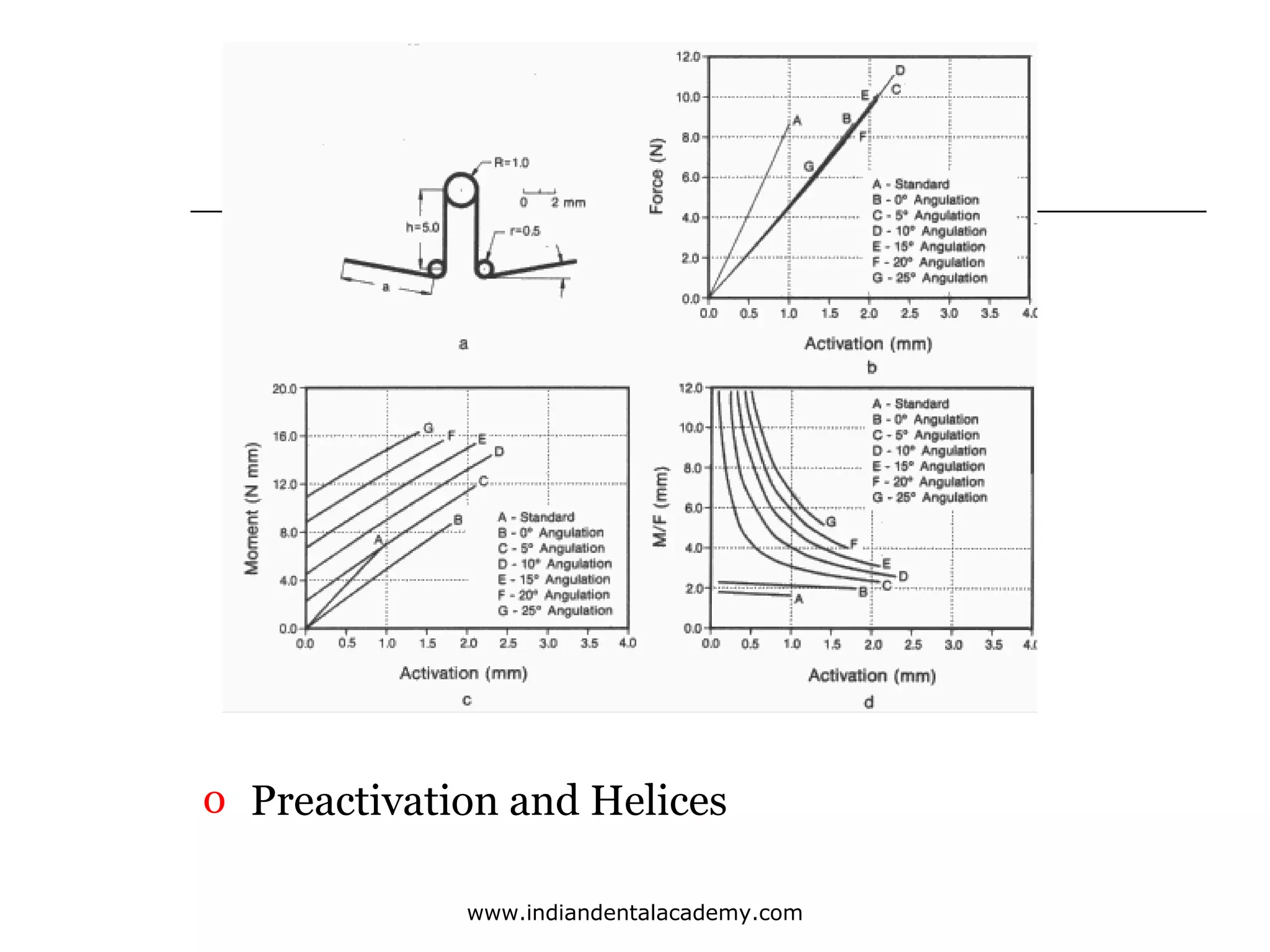
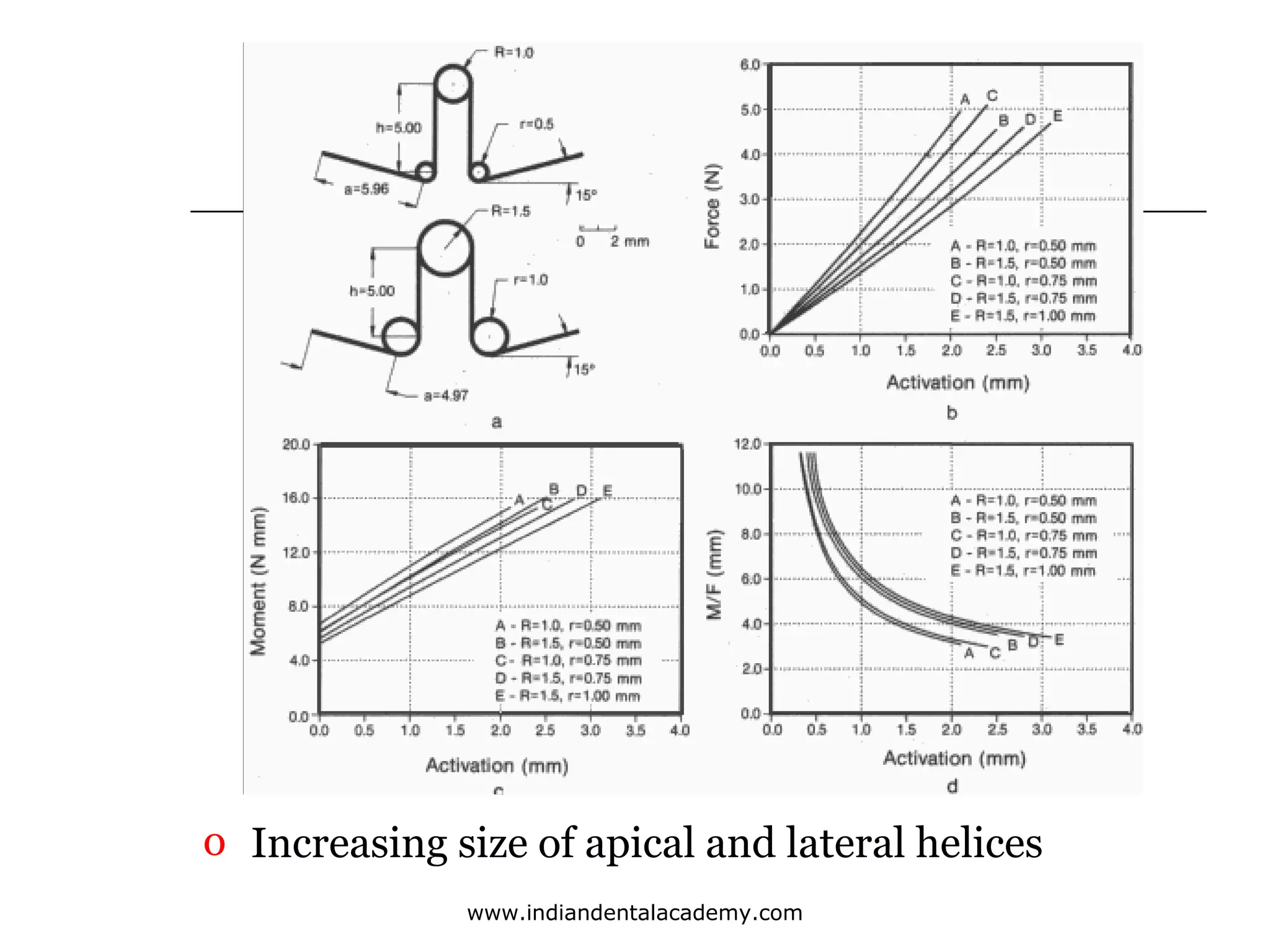
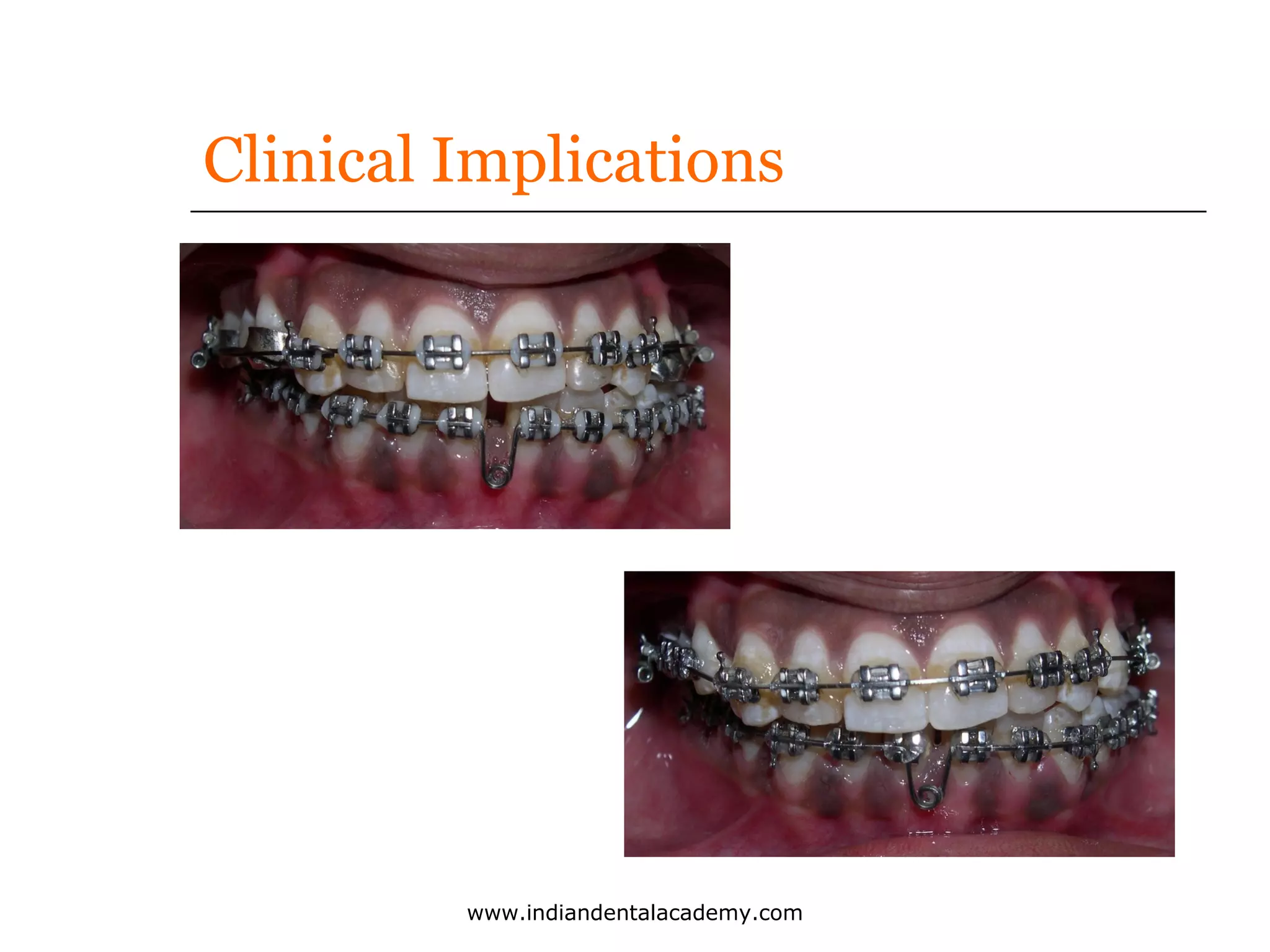

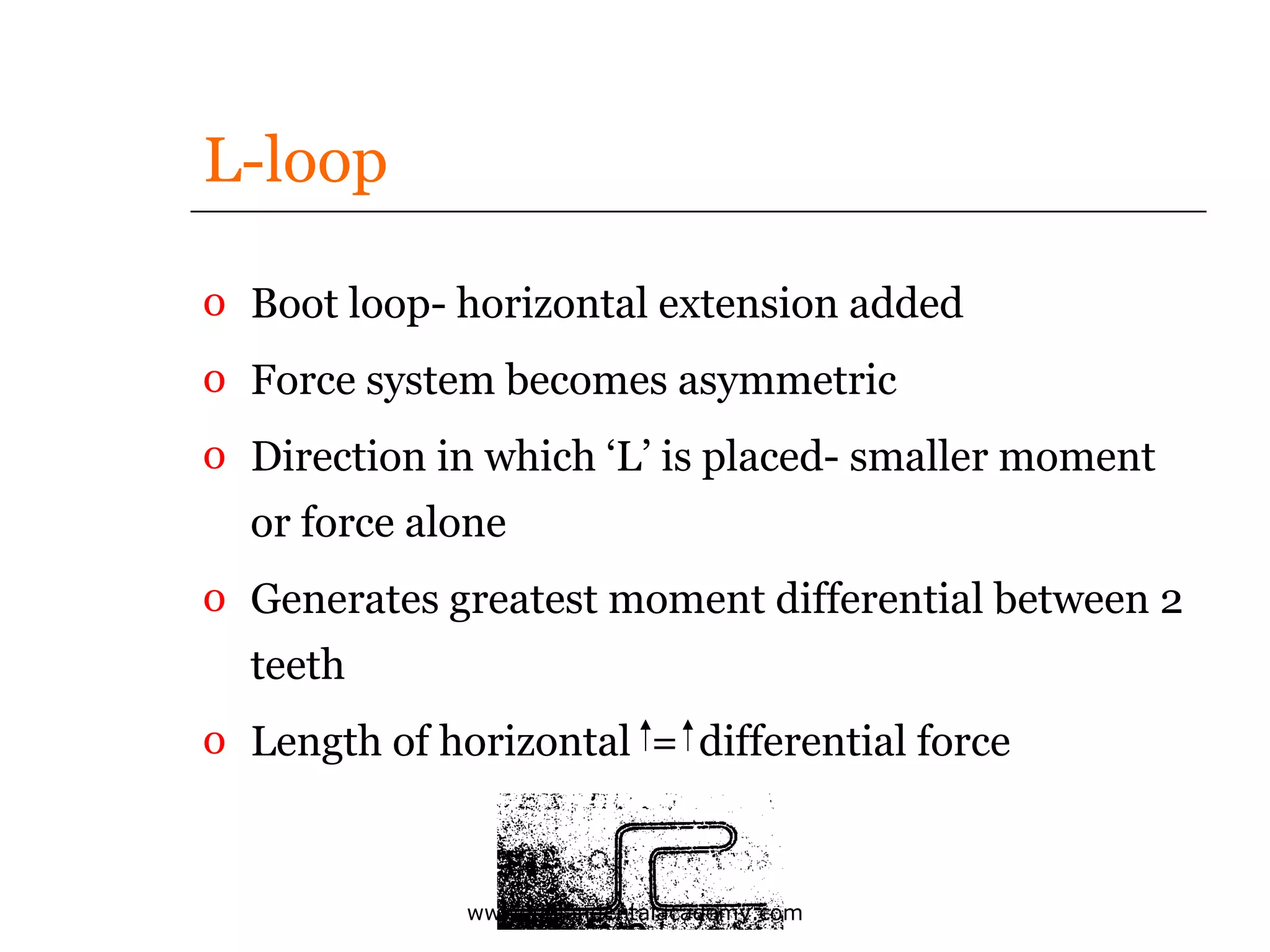
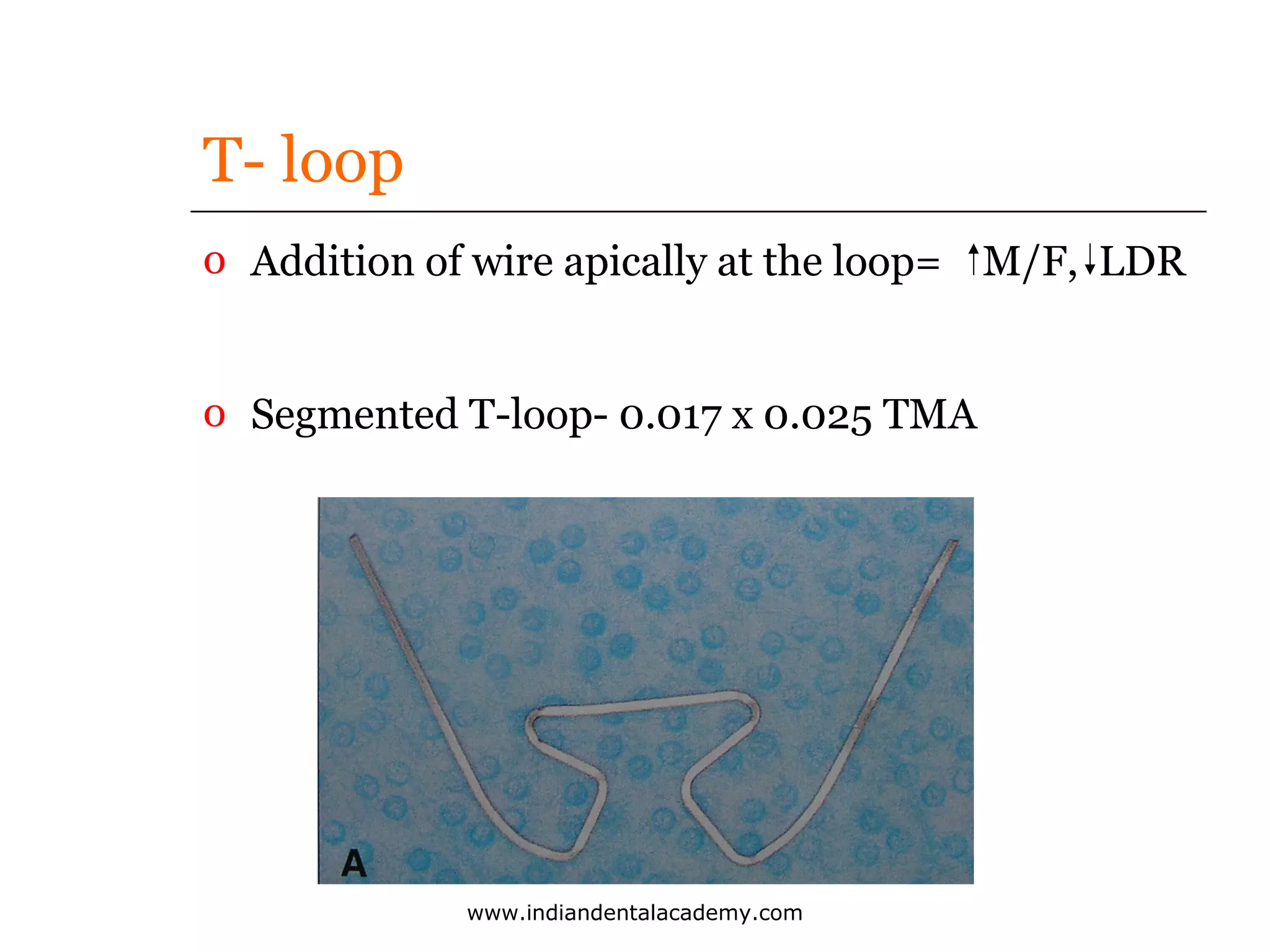


The document discusses various techniques and innovations in dental biomechanics and orthodontics, focusing on space closure methods, controlled tipping of incisors, and the use of different archwires and elastics. It covers new advances in frictionless mechanics, vertical loops, and the kamedanized Begg technique, including discussions on force systems and the implications of these methods on patient treatment. Additionally, it addresses the clinical applications of various orthodontic systems and their effectiveness in achieving desired tooth movements.