
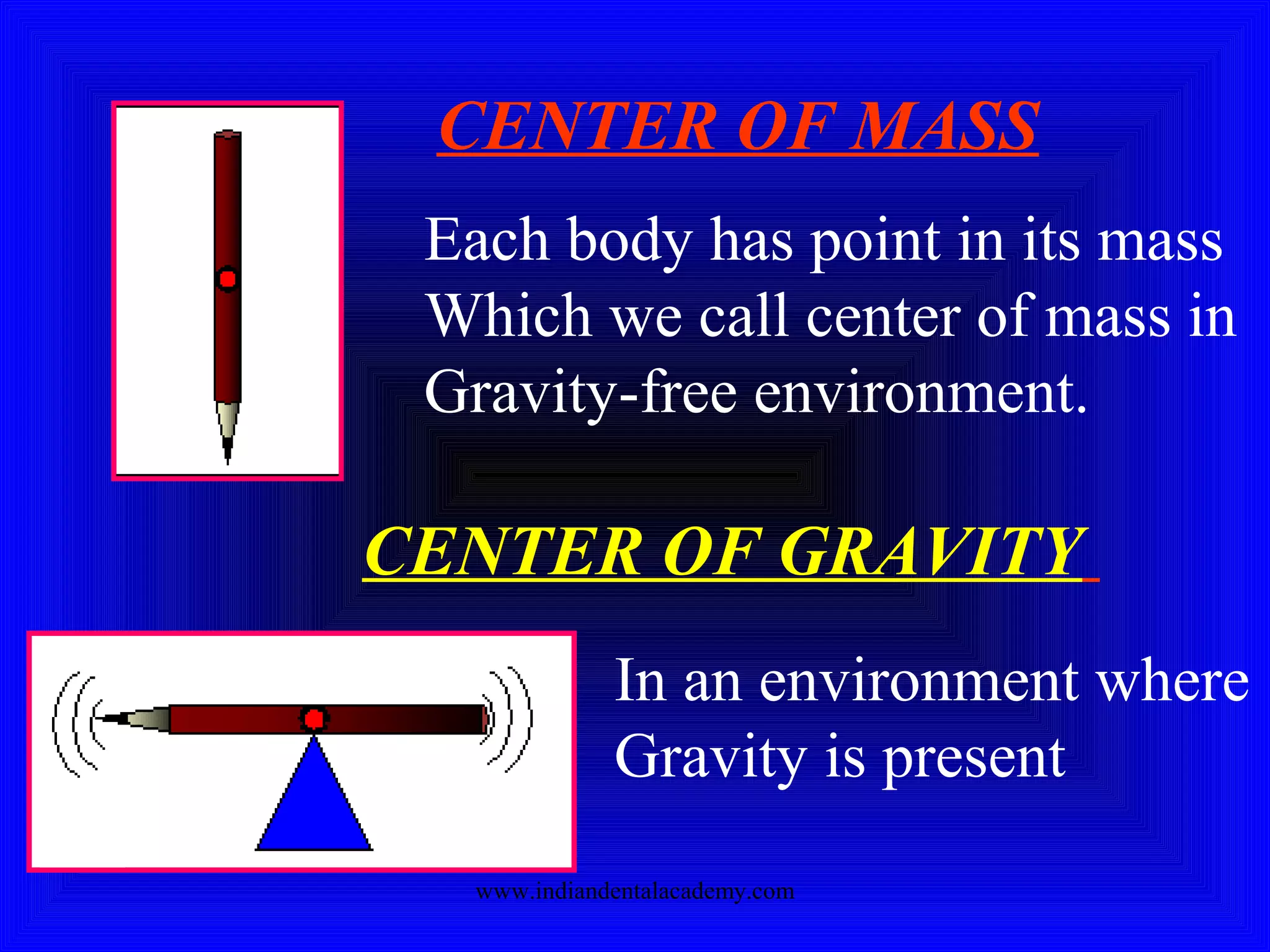


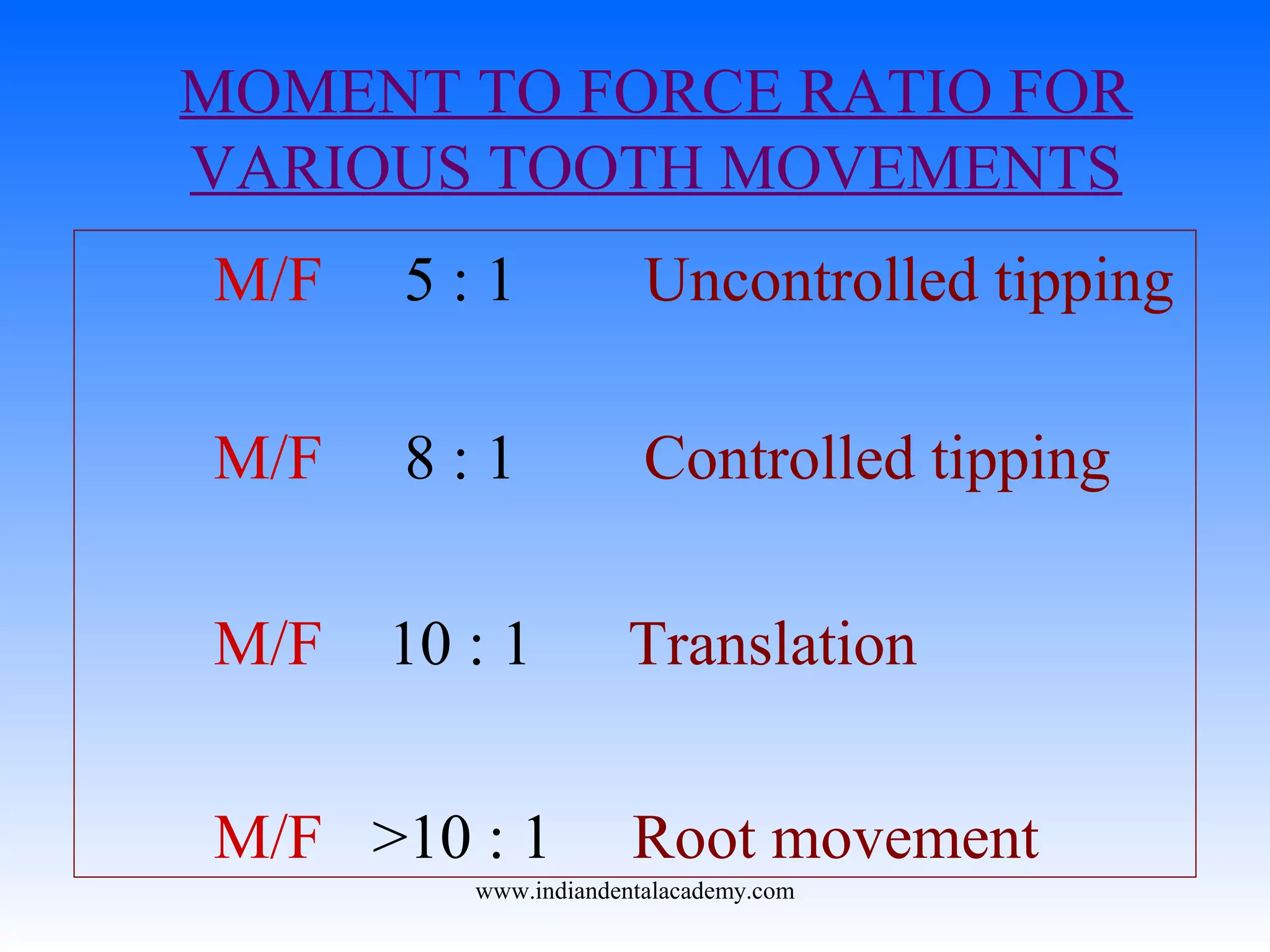

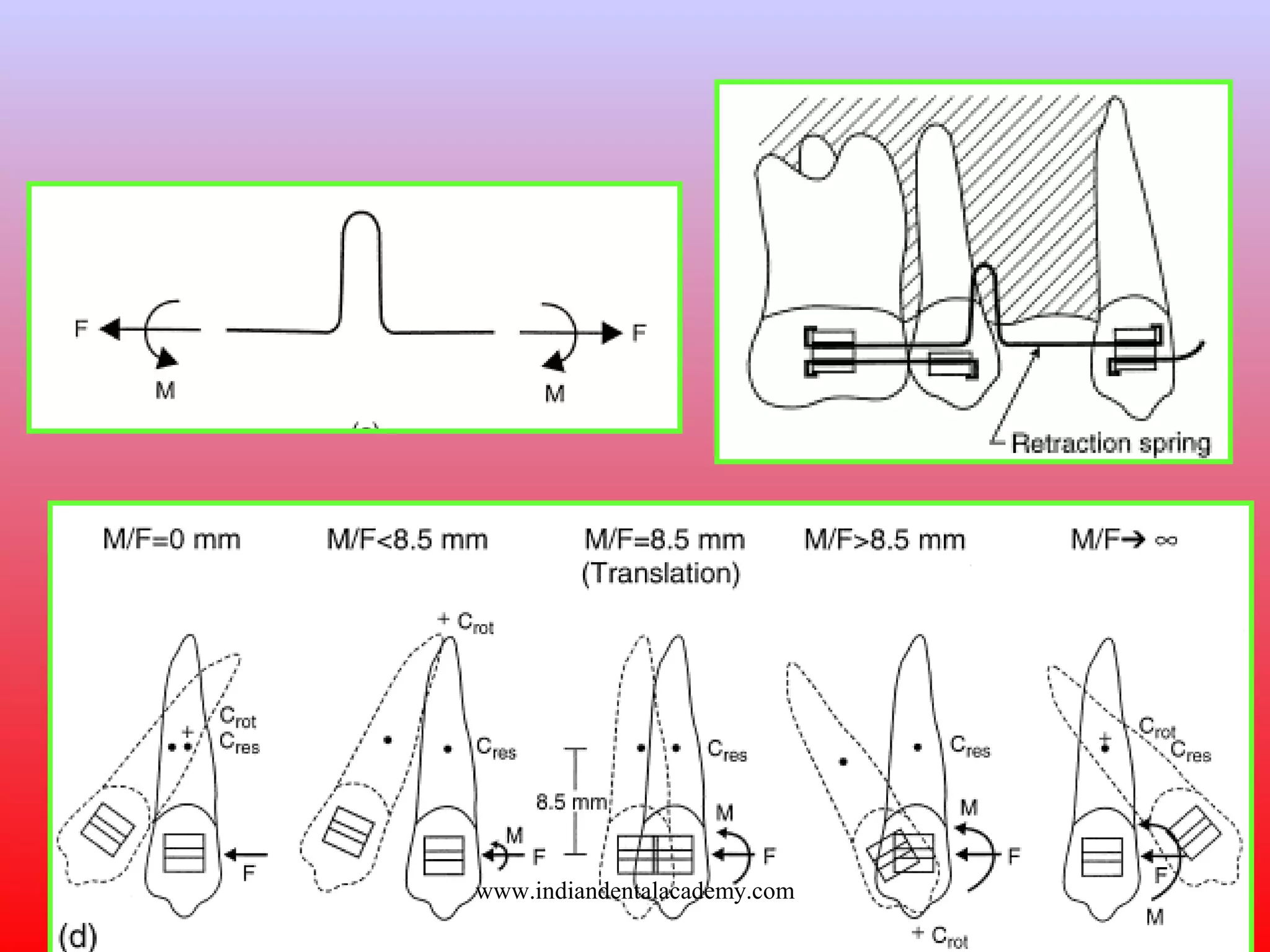

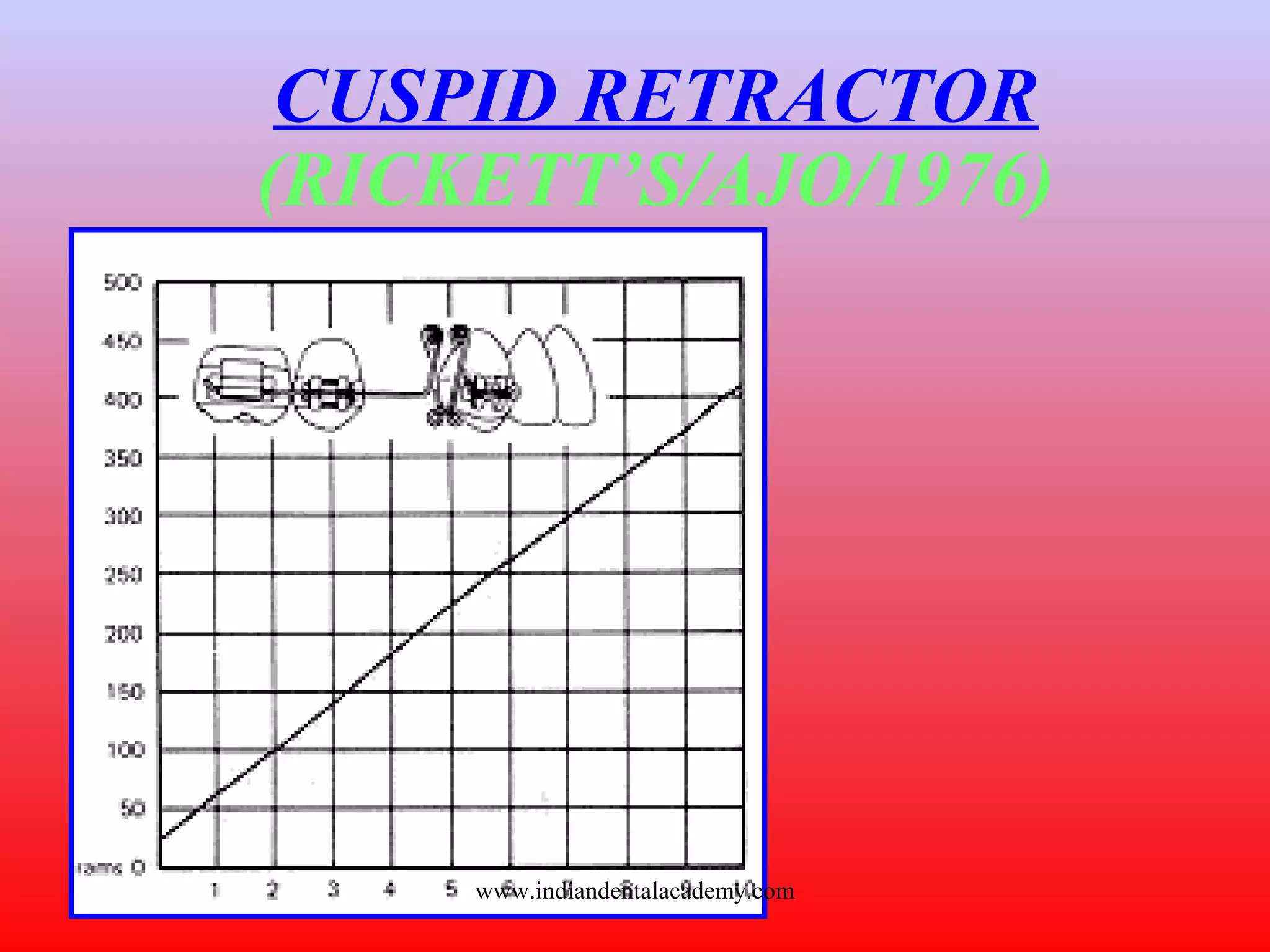
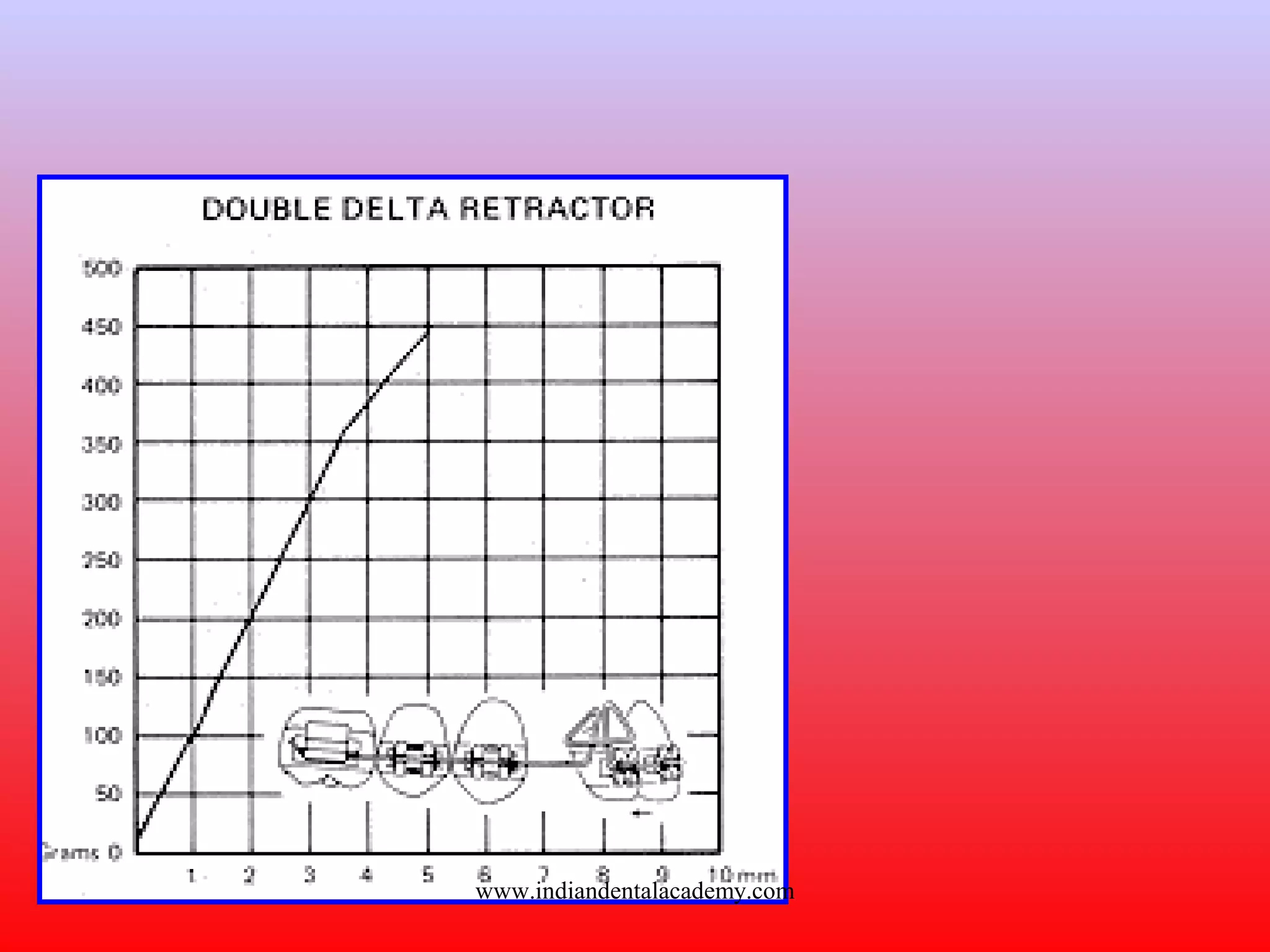
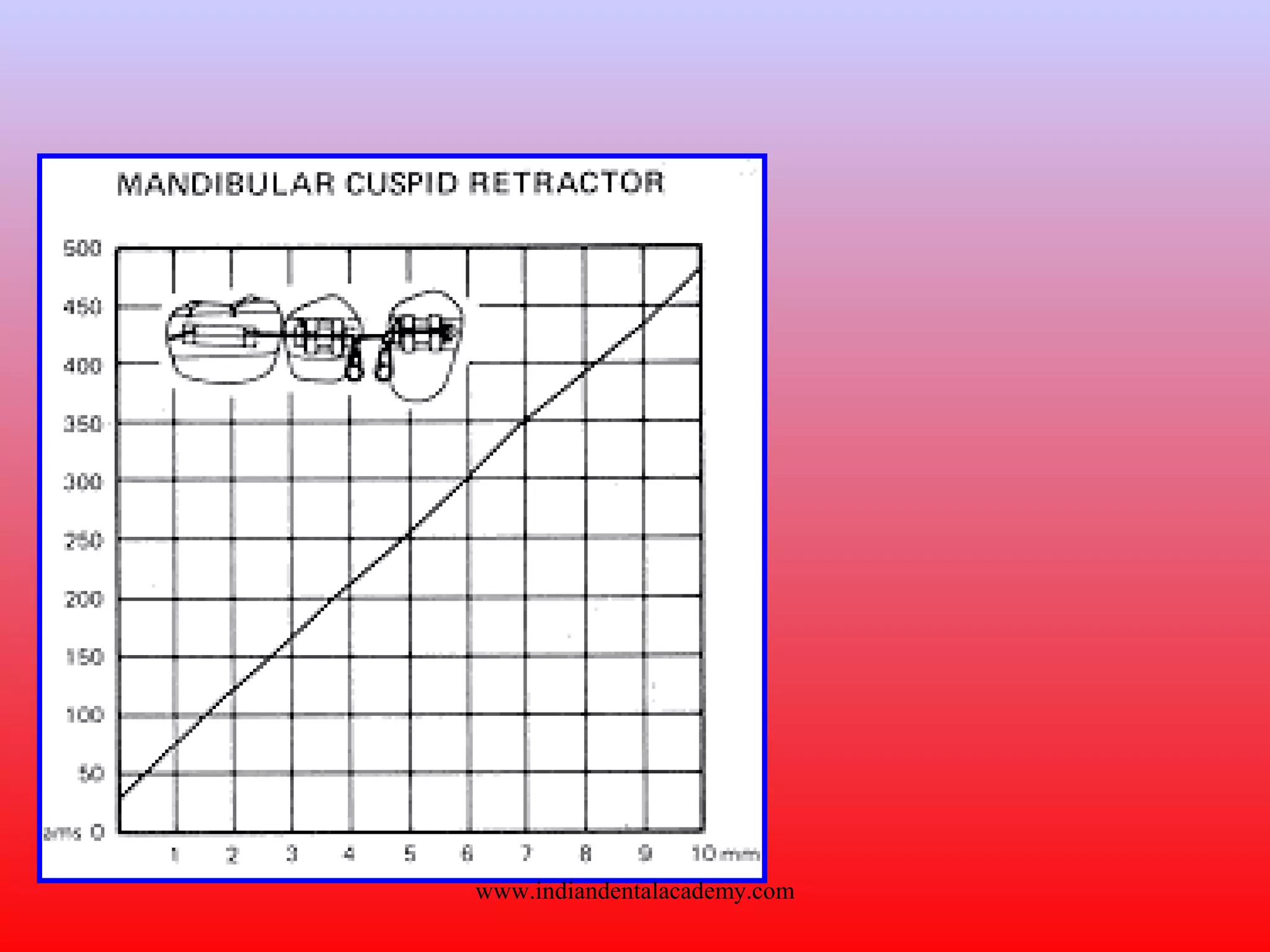















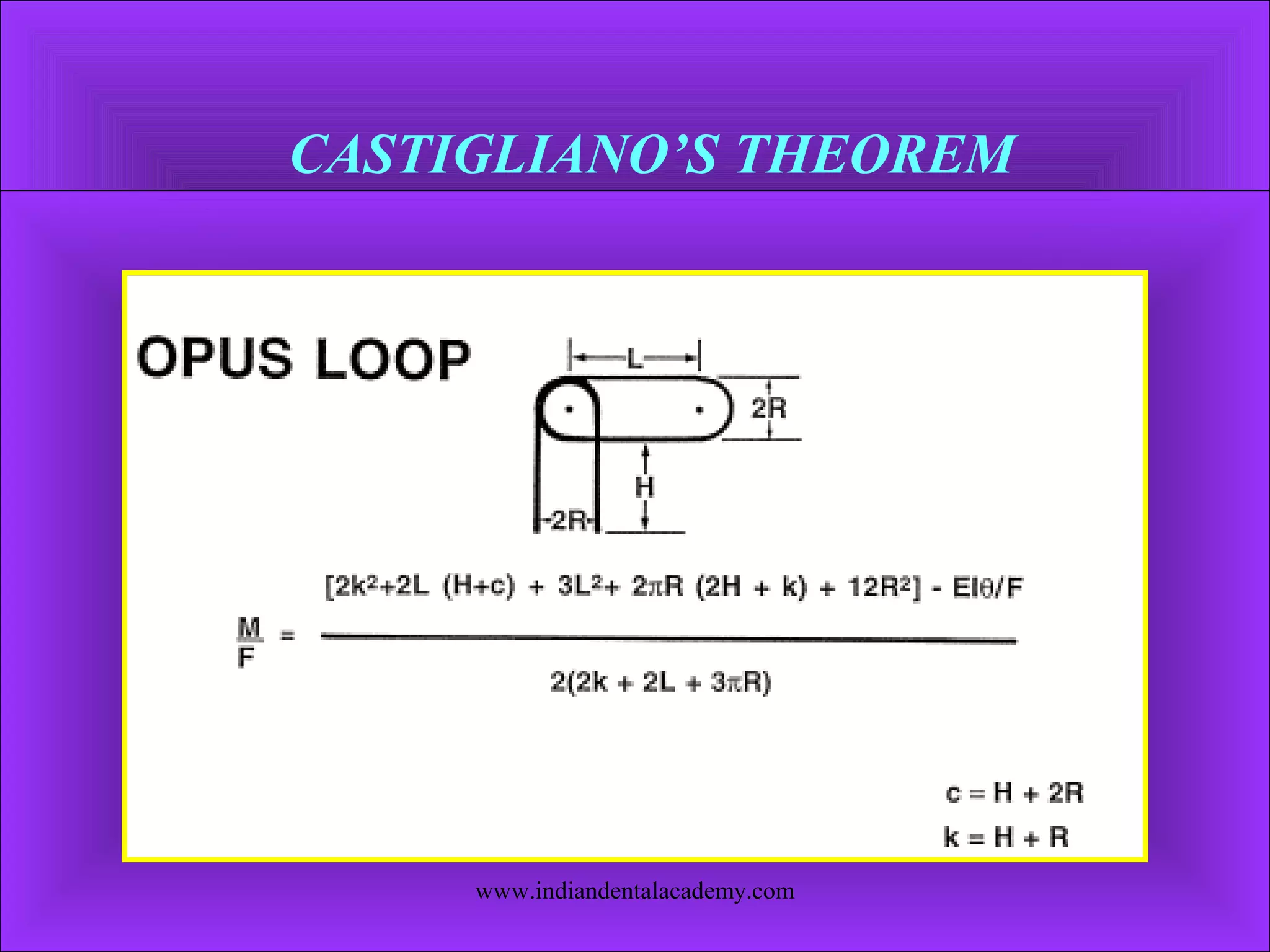
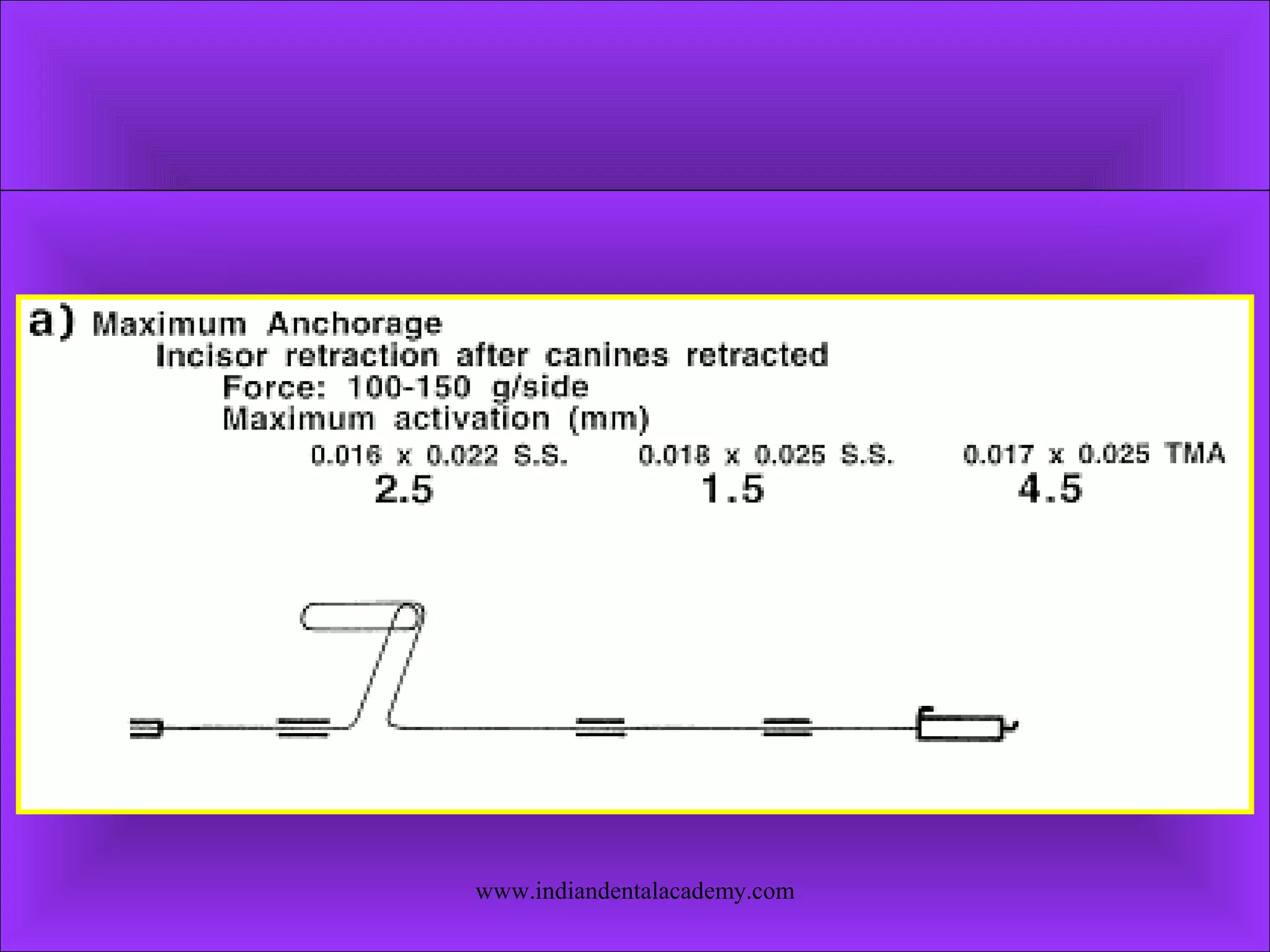
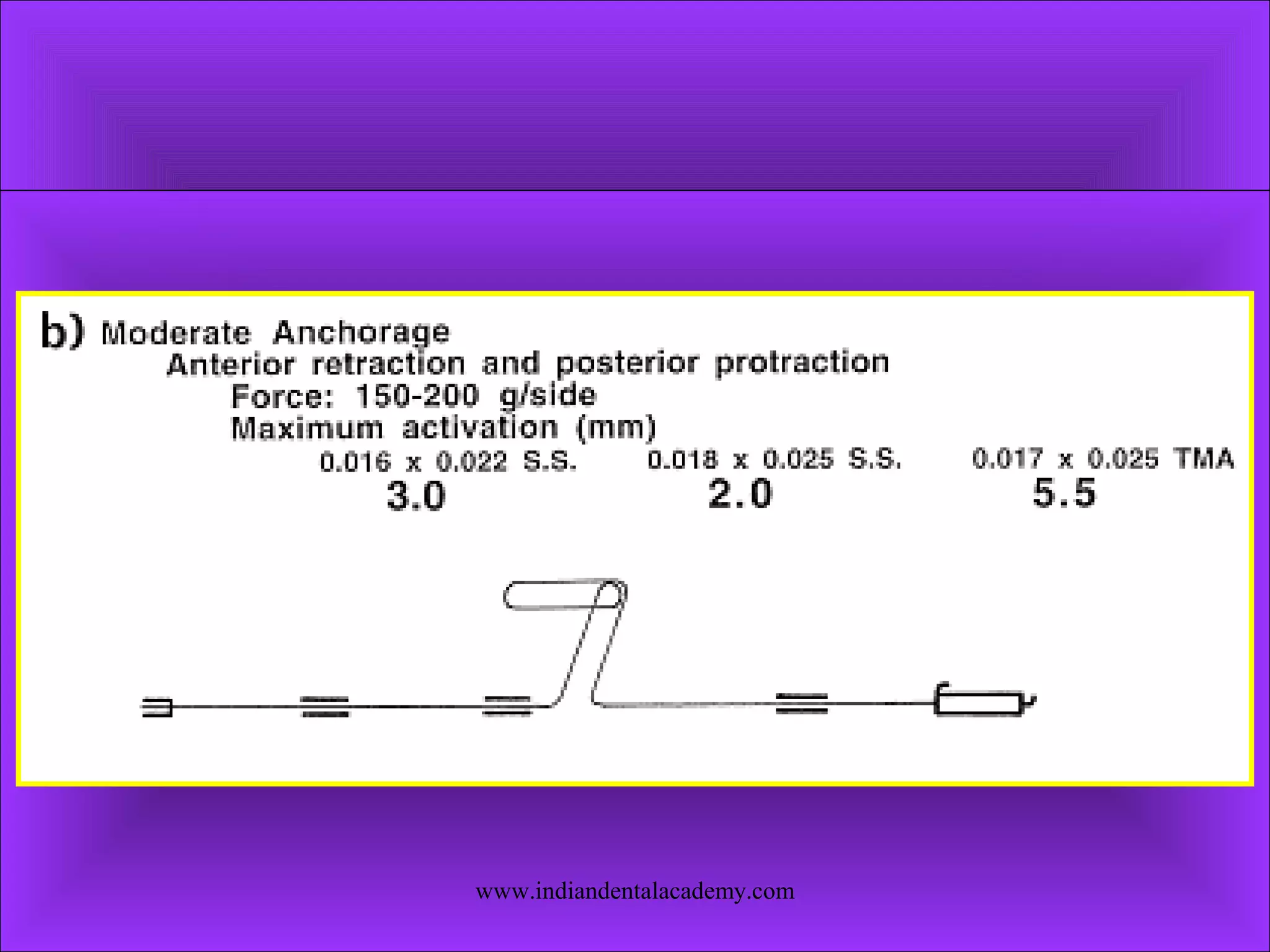
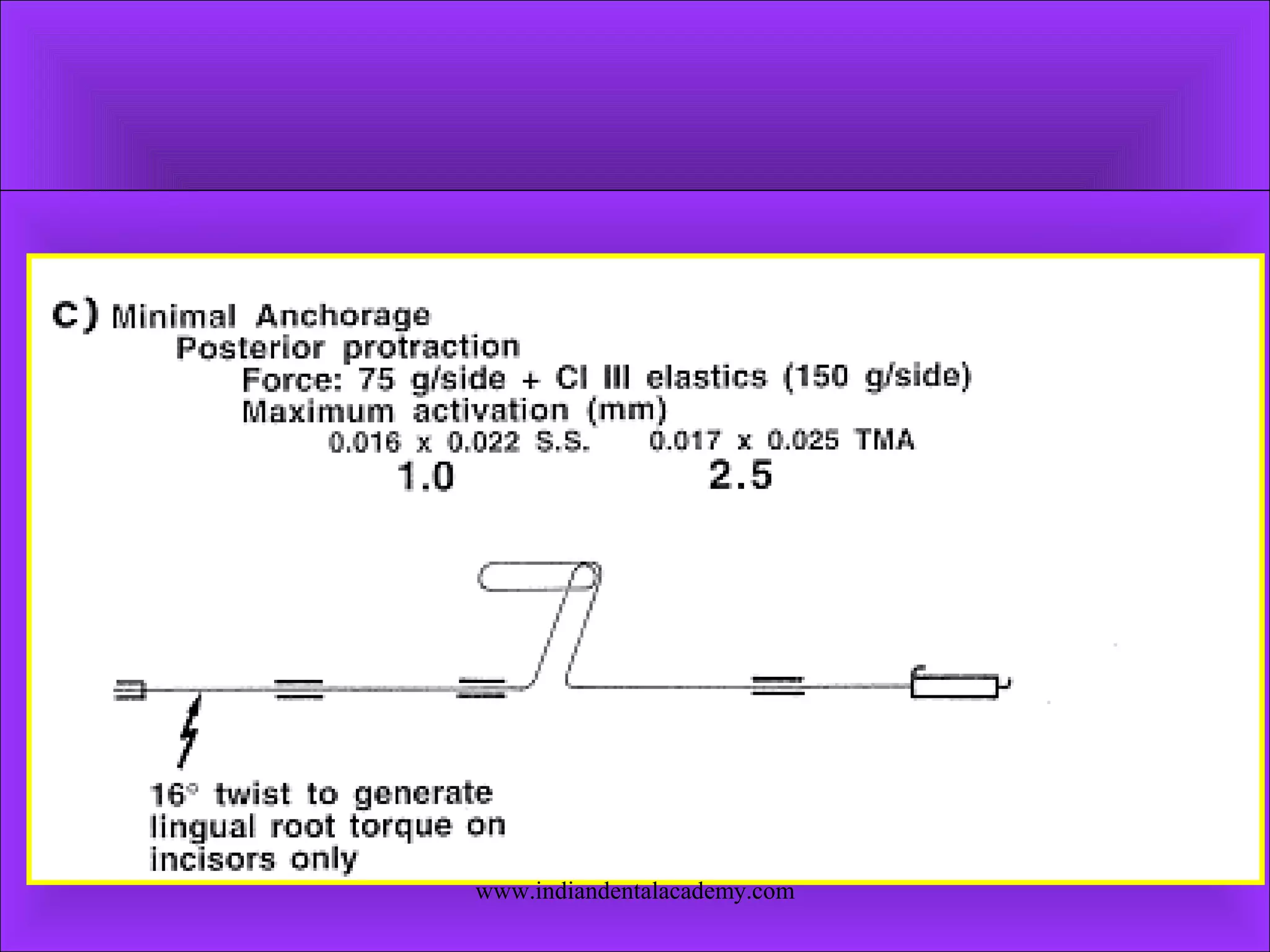







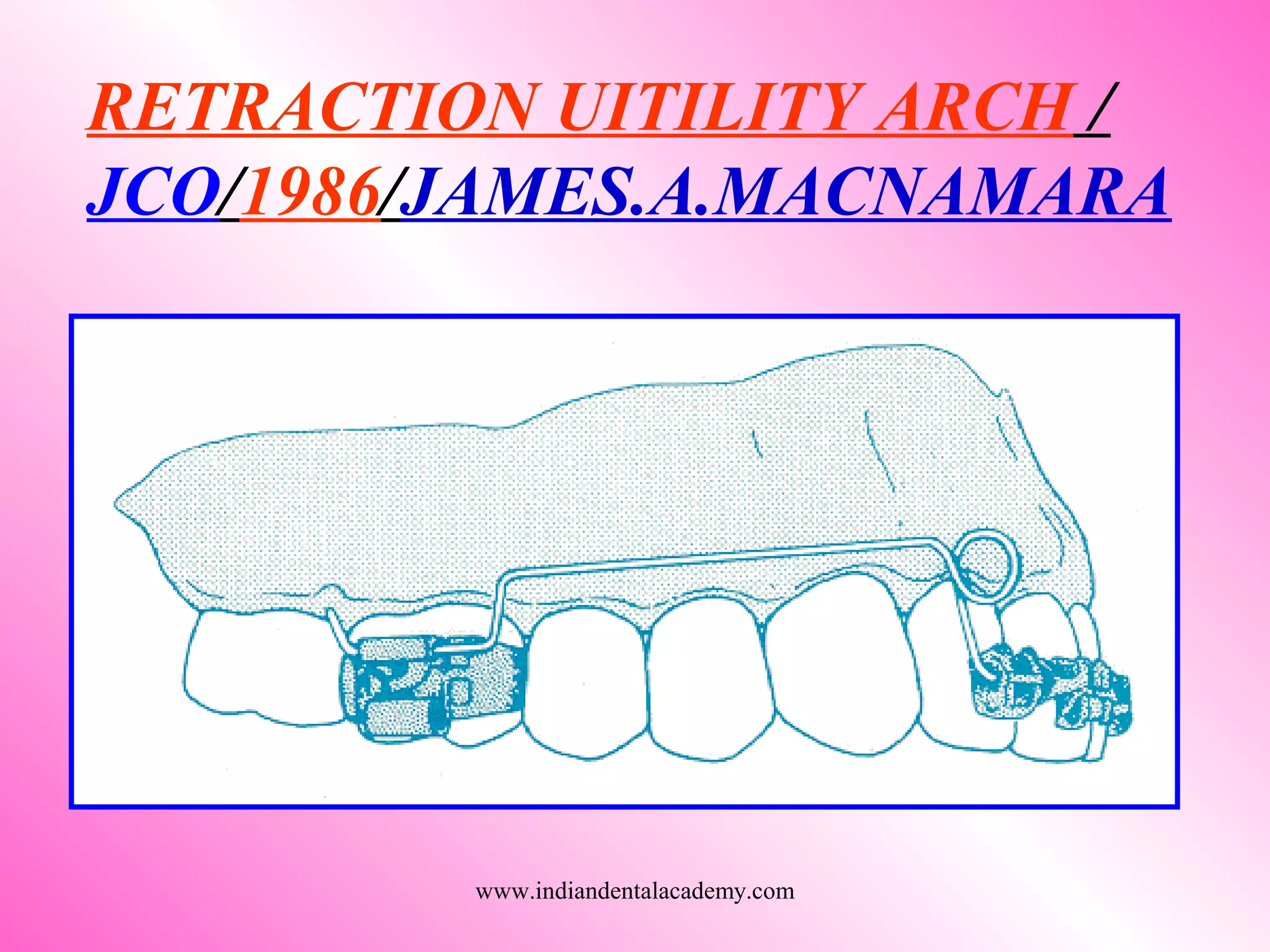


The document discusses the mechanics of tooth movement, detailing both extrinsic and intrinsic forces, the evolution of orthodontic techniques, and the importance of understanding moments and force application. It examines different types of mechanics, including friction and frictionless mechanics, and their impact on teeth movement, anchorage, and retraction systems, highlighting various loop designs and their functionalities. Additionally, factors influencing moment-to-force ratios and strategies for effective tooth retraction are explored, emphasizing the need for precise biomechanical forces in orthodontic treatment.





























































































