Download to read offline

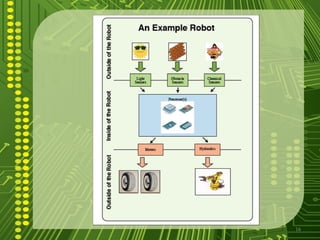


This document outlines the daily agenda and reflections for a 19-day robotics workshop using Lego Mindstorms NXT kits. Each day covers different robotics concepts like definitions of robots, sensors, processors, actuators and programming. Students build a tri-bot robot and learn programming concepts like touch sensors, sound blocks, loops and ultrasonic sensors. The agenda culminates in students designing final projects to demonstrate their learning, and a showcase for parents on the last day. Key topics covered include types of movement, writing directions, debugging programs and working as a team.


















































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)














