Downloaded 14 times




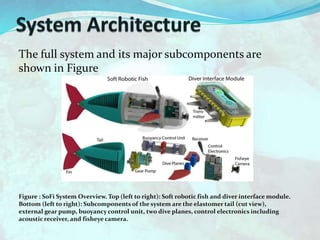






1) MIT researchers have created an advanced robotic fish called SOFI that uses a soft body and hydraulic actuation to mimic the swimming of real fish. 2) SOFI is remotely operated by divers via an acoustic communication system and has the ability to explore coral reef environments and capture video of marine life. 3) Tests of SOFI in the open ocean demonstrated its ability to navigate complex underwater environments and transmit data over distances of up to 10 meters, allowing divers to remotely control and navigate the robotic fish.