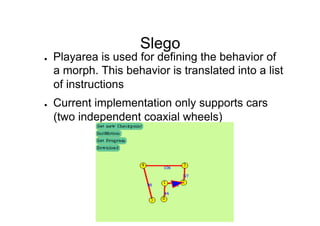
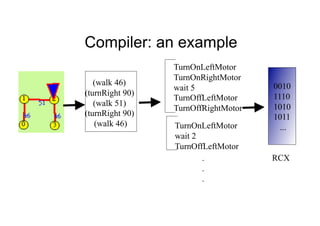
Slego is a Squeak implementation that allows behaviors defined using Morphs in Squeak to be compiled and run on Lego Mindstorms robots. It provides an environment for defining morph behaviors, a compiler that translates the high level behaviors into primitive instructions for the Lego robot, and serial port communication to download programs and control the robot. The system currently supports programs to control cars with two independent wheels. Future work includes adding support for more sensors, improving accuracy, and extending Slego to additional robot platforms.


























![ESUG 2009: [Project planning], by Tim Mackinnon](https://cdn.slidesharecdn.com/ss_thumbnails/esug2009-planning-251028124040-b55d3034-thumbnail.jpg?width=640&height=640&fit=bounds)





































