Dokumen ini adalah bahan ajar untuk siswa kelas XI dalam bidang teknik otomasi industri, khususnya sistem kontrol elektropneumatik. Buku ini mengikuti kurikulum 2013 yang dirancang untuk meningkatkan kompetensi pengetahuan, keterampilan, dan sikap siswa melalui eksplorasi dan pembelajaran berbasis aktivitas ilmiah. Materi mencakup pengenalan sistem pneumatik, operasi, perakitan, dan aplikasi sistem kontrol elektropneumatik yang relevan dengan industri.






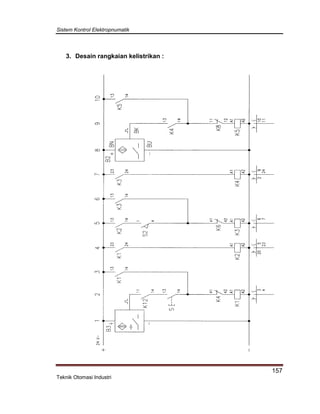
![Sistem Kontrol Elektropnumatik
8
Teknik Otomasi Industri
sistem pnumatik. Pada sistem hidrolik digunakan oli mineral sebagai fluida
kerjanya, sedang pada sistem pnumatikdigunakan udara atmosfir.
Mekanisasi dan otomatisasi dalam bidang proses dan manufaktur di industri
menjadikan pneumatic automation menjadi pilar utama dalam banyak industri,
misalnya untuk keperluan material handling, packaging, bottling, distributing, &
sorting system. Otomasi dengan pnumatikditerapkandi berbagai industri, misalnya
industri makanan & minuman, farmasi, logam, pertambangan dan petrokimia.
Kemajuan teknologi di bidang otomasi dengan pnumatik tersebut menuntut
tersedianya engineering and maintenance personal yang memiliki pengetahuan
dan pengalaman praktis di bidang mechanical, electrical, electronic and
compressed air/fluid power technologies.
Penggunaan controlpnumatik dan aktuasi menjadi semakin luas di bidang
otomasi industri. Salah satu alasannya adalah, dari sekian banyak masalah
otomasi industri, maka tidak ada medium yang lebih mudah didapat dan lebih
ekonomis.Disamping memiliki karakteristik positif sistem kontrol pnumatik juga
memiliki karakteristik negatif.
Berikut ini diberikan beberapa karakteriistik positif dari udara untuk
pneumatics automation:
Quantity : Tersedia di mana saja dan tak terbatas
Transportation : Mudah disalurkan melalui pipa
Storage : Dapat disimpan di dalam tanki atau botol
Temperature : Udara tidak sensitif terhadap fluktuasi suhu.
Explosion-proof : Udara tekan tidak menyebabkan terjadinya ledakan.
Cleanliness : Udara tekan sangat bersih tidak menimbulkan polusi.
Construction : Konstruksi komponen pnumatik relatif sederhana.
Speed : Udara tekan merupakan working medium yang
mempunyai respon cepat [1-2 m/s]
Agar diperoleh garis demarkasi yang tegas dalam aplikasi otomasi
dengan pnumatik, berikut ini diberikan karakteristik negatif dari sistem
pnumatik, yaitu:](https://image.slidesharecdn.com/sistem-kontrol-elektro-pneumatik-1-170720045751/85/Sistem-kontrol-elektro-pneumatik-1-8-320.jpg)