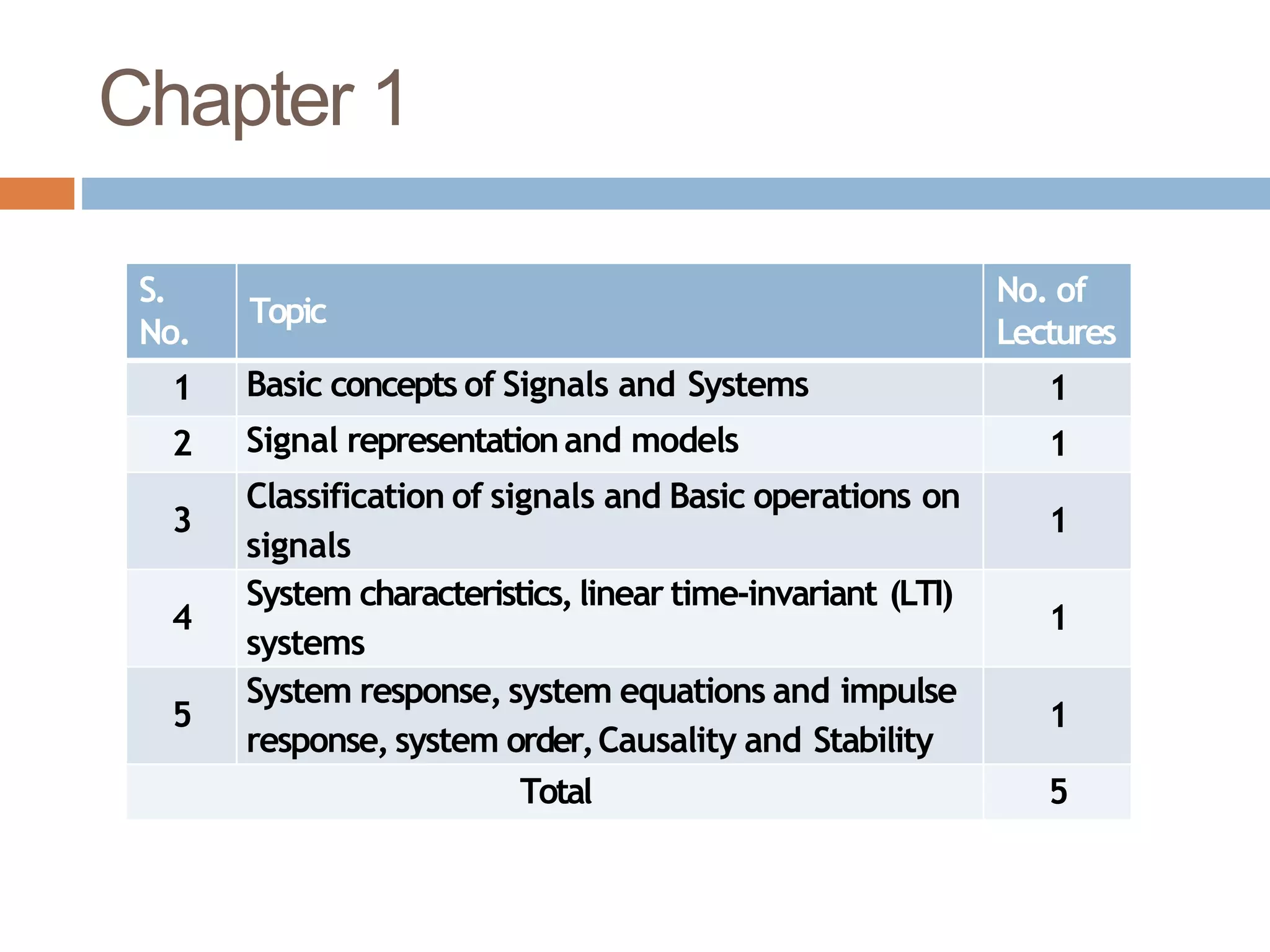
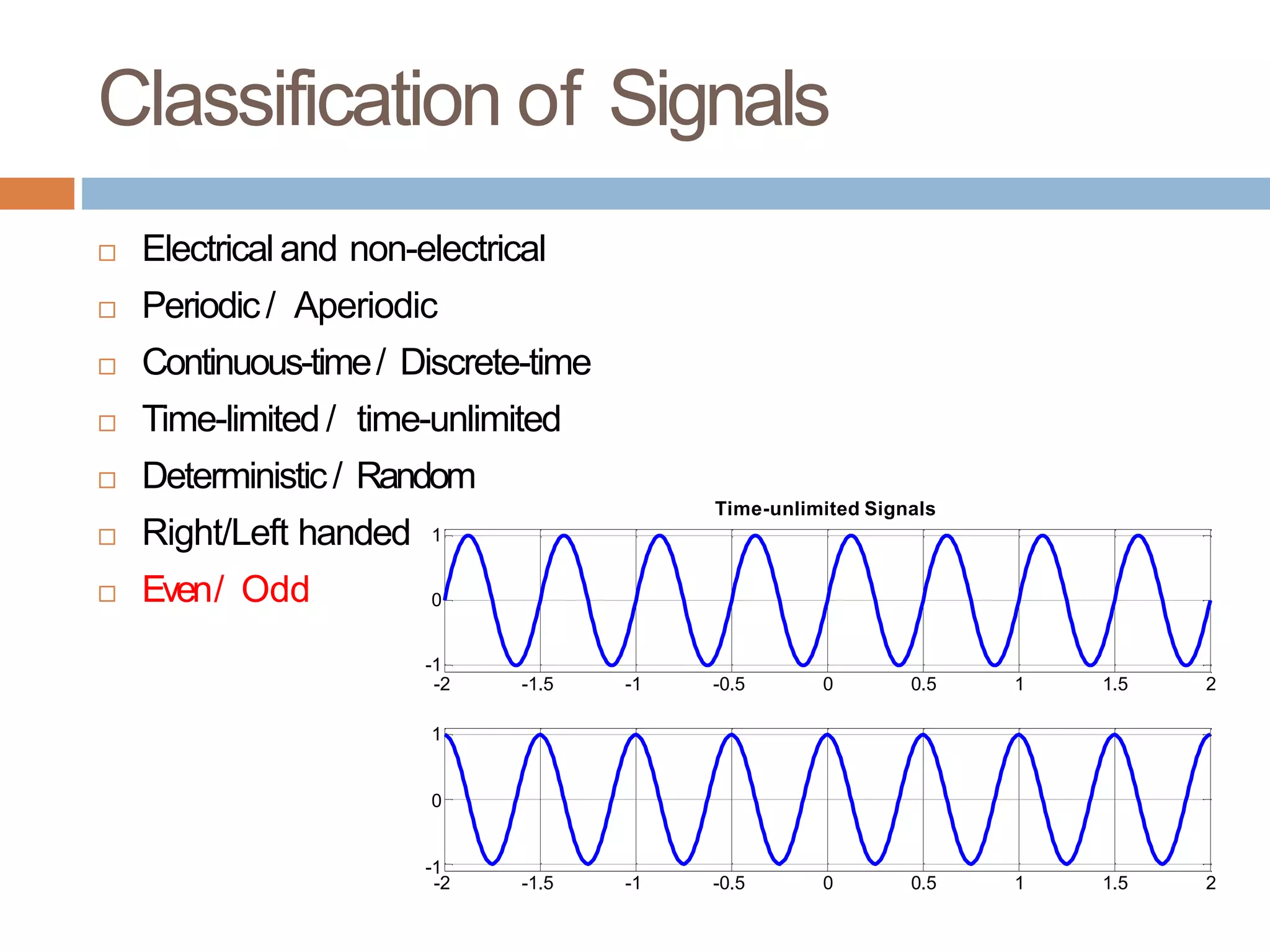
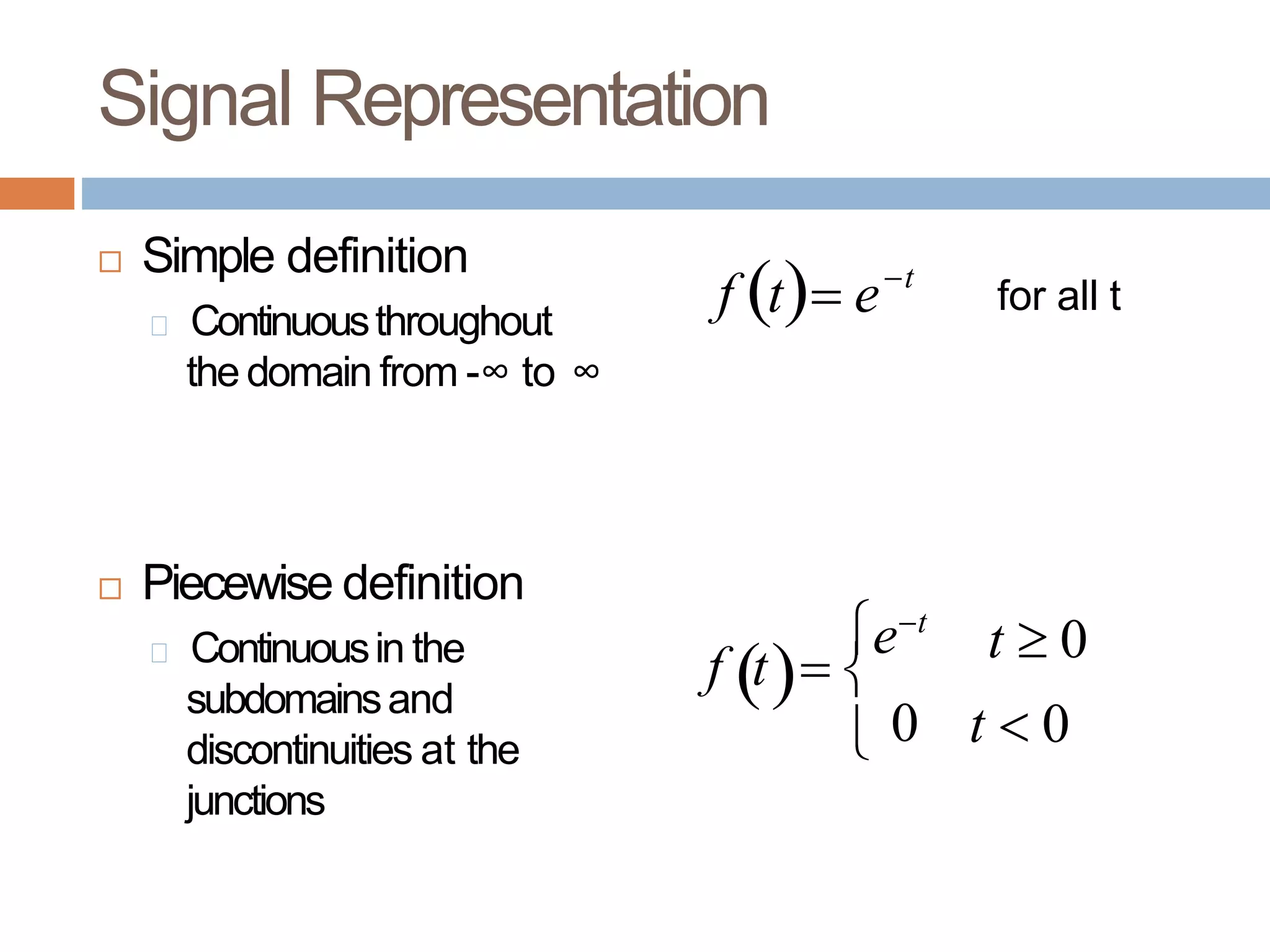
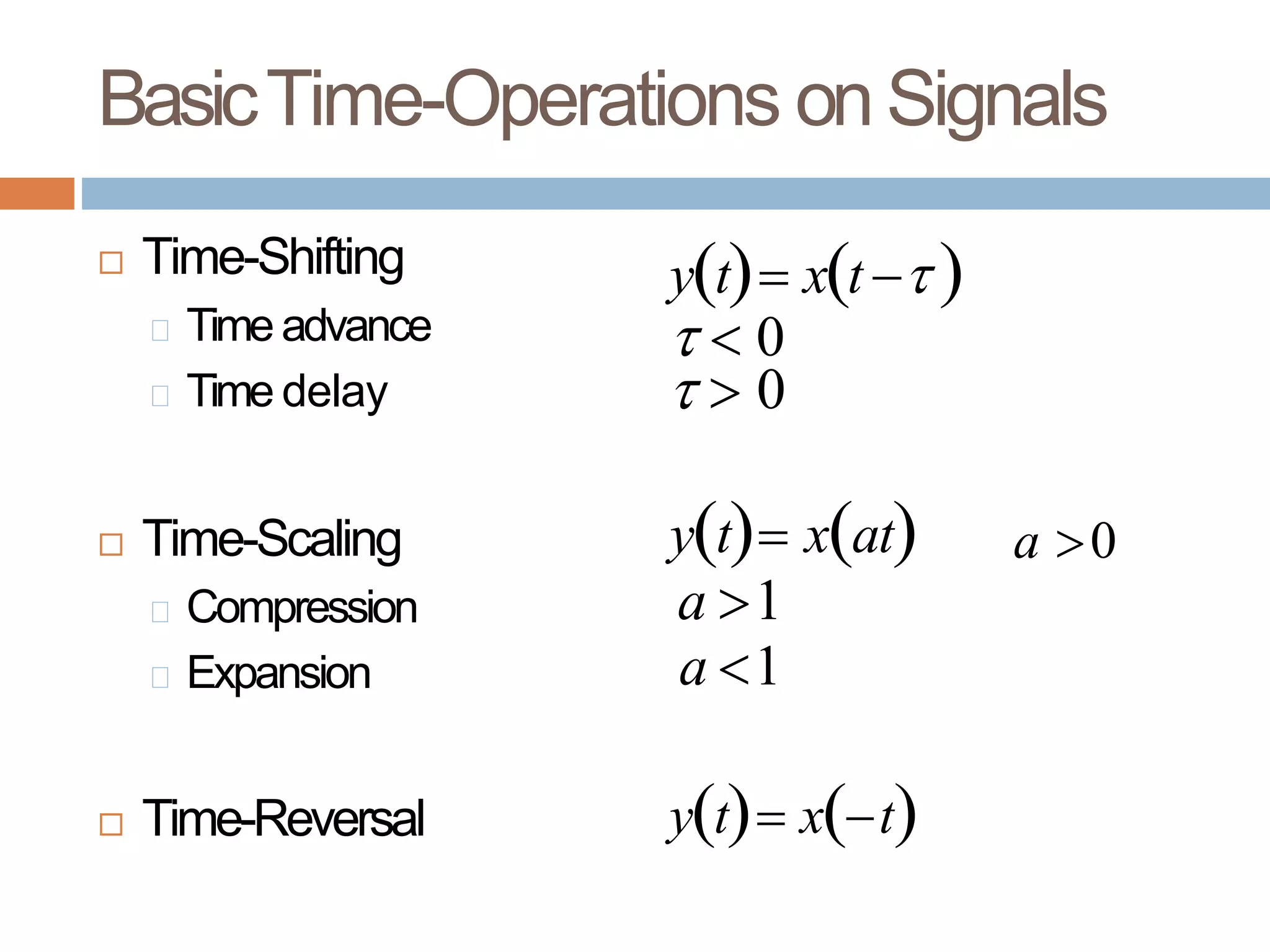
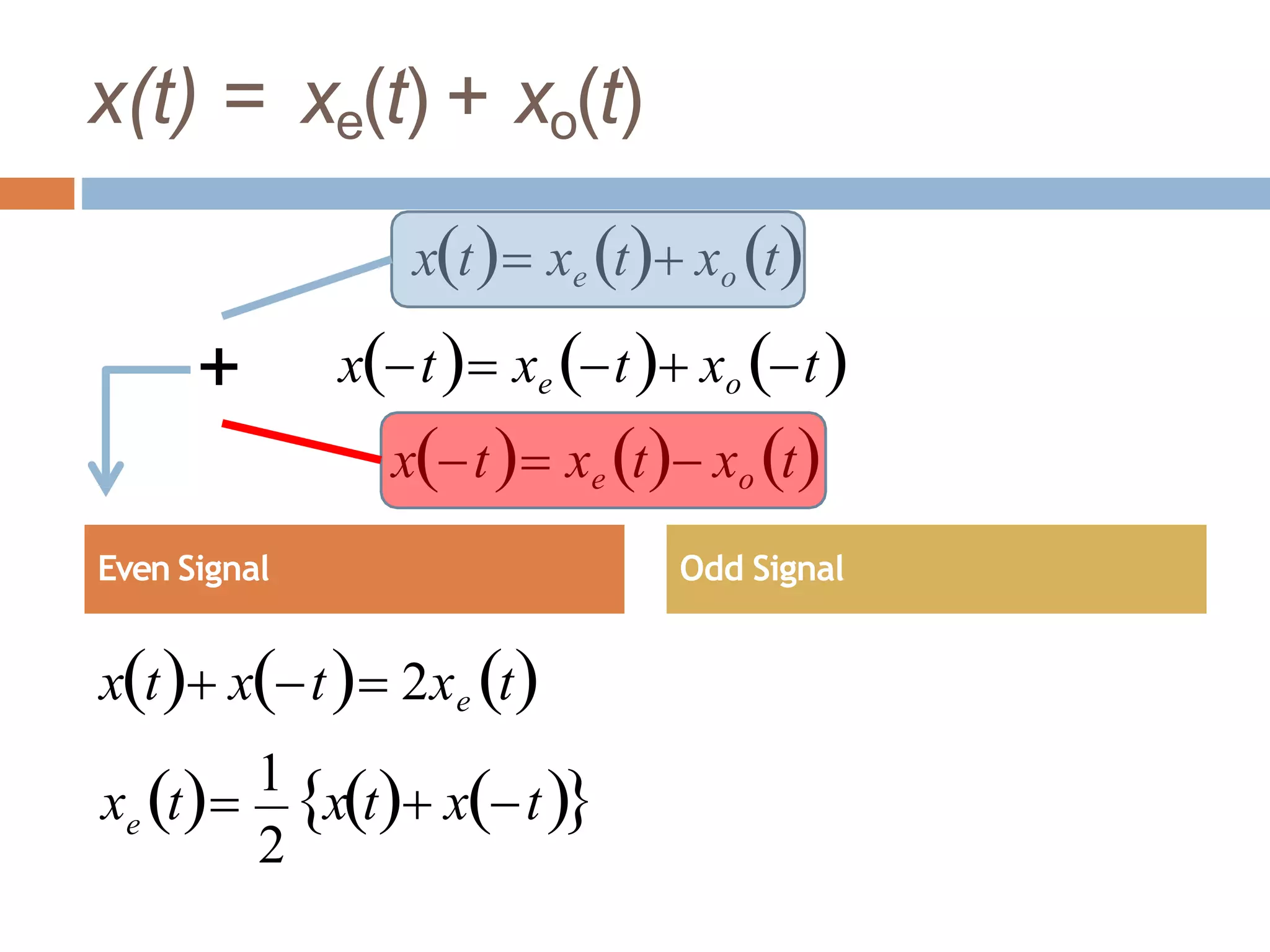
The document presents an introduction to signals and systems, outlining key topics, reading materials, and structure of the course. It covers definitions of signals, classifications of signals based on various criteria, and basic operations like time-shifting, scaling, and reversal. Furthermore, it emphasizes the importance of understanding signal representation and mathematical manipulation in the context of linear time-invariant systems.




































![Digital Signal Processing[ECEG-3171]-Ch1_L02](https://cdn.slidesharecdn.com/ss_thumbnails/dspl2-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)