
More Related Content
Similar to signal.pdf
Similar to signal.pdf (20)
Recently uploaded
Recently uploaded (20)
signal.pdf
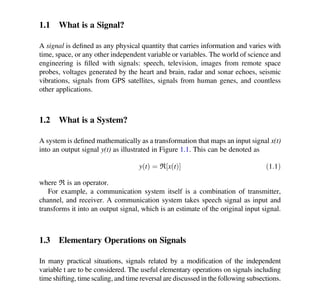
- 1. Chapter 1 Introduction 1.1 What is a Signal? A signal is defined as any physical quantity that carries information and varies with time, space, or any other independent variable or variables. The world of science and engineering is filled with signals: speech, television, images from remote space probes, voltages generated by the heart and brain, radar and sonar echoes, seismic vibrations, signals from GPS satellites, signals from human genes, and countless other applications. 1.2 What is a System? A system is defined mathematically as a transformation that maps an input signal x(t) into an output signal y(t) as illustrated in Figure 1.1. This can be denoted as y t ð Þ ¼ ℜ x t ð Þ ½ ð1:1Þ where ℜ is an operator. For example, a communication system itself is a combination of transmitter, channel, and receiver. A communication system takes speech signal as input and transforms it into an output signal, which is an estimate of the original input signal. 1.3 Elementary Operations on Signals In many practical situations, signals related by a modification of the independent variable t are to be considered. The useful elementary operations on signals including time shifting, time scaling, and time reversal are discussed in the following subsections. © Springer International Publishing AG, part of Springer Nature 2018 K. D. Rao, Signals and Systems, https://doi.org/10.1007/978-3-319-68675-2_1 1
- 2. 1.3.1 Time Shifting Consider a signal x(t). If it is time shifted by t0, the time-shifted version of x(t) is represented by x(t t0). The two signals x(t) and x(t t0) are identical in shape but time shifted relative to each other. If t0 is positive, the signal x(t) is delayed (right shifted) by t0. If t0 is negative, the signal is advanced (left shifted) by t0. Signals related in this fashion arise in applications such as sonar, seismic signal processing, radar, and GPS. The time shifting operation is illustrated in Figure 1.2. If the signal x (t) shown in Figure 1.2(a) is shifted by t0 ¼ 2 seconds, x(t 2) is obtained as shown in Figure 1.2(b), i.e., x(t) is delayed (right shifted) by 2 seconds. If the signal is advanced (left shifted) by 2 seconds, x(t þ 2) is obtained as shown in Figure 1.2(c), i.e., x(t) is advanced (left shifted) by 2 seconds. 1.3.2 Time Scaling The compression or expansion of a signal is known as time scaling. The time-scaling operation is illustrated in Figure 1.3. If the signal x(t) shown in Figure 1.3(a) is ( ) Figure 1.1 Schematic representation of a system 0 2 1 -2 t x(t) 4 0 2 1 -2 t x(t-2) 1 -4 0 2 -2 t x(t+2) (a) (b) (c) Figure 1.2 Illustration of time shifting 2 1 Introduction
- 3. compressed in time by a factor 2, x(2t) is obtained as shown in Figure 1.3(b). If the signal x(t) is expanded by a factor of 2, x(t/2) is obtained as shown in Figure 1.3(c). 1.3.3 Time Reversal The signal x(t) is called the time reversal of the signal x(t). The x(t) is obtained from the signal x(t) by a reflection about t ¼ 0. The time reversal operation is illustrated in Figure 1.4. The signal x(t) is shown in Figure 1.4(a), and its time reversal signal x(t) is shown in Figure 1.4(b). (a) (b) -4 -2 -2 2 2 4 t x(t) -1 1 -2 -2 2 2 t x(2t) -4 -2 -2 2 2 4 t x(t/2) Figure 1.3 Illustration of time scaling t -2 2 2 x(t) (a) (b) t -2 2 2 x(-t) Figure 1.4 Illustration of time reversal 1.3 Elementary Operations on Signals 3
- 4. Example 1.1 Consider the following signals x(t) and xi(t), i ¼ 1,2,3. Express them using only x(t) and its time-shifted, time-scaled, and time-inverted version. t -2 2 x(t) t -2 2 2 t 4 4 4 t 2 2 Solution 0 0 0 0 t 2 2 x(t-2) 4 t 2 2 t 2 2 x(-t) t -2 2 x(t) x1 t ð Þ ¼ x t 2 ð Þ þ x t þ 2 ð Þ t 2 2 x(-t) t -2 2 4 1 Introduction
- 5. x2 t ð Þ ¼ x t 2 ð Þ þ x t 2 ð Þ x3 t ð Þ ¼ 2x t 2 2 1.4 Classification of Signals Signals can be classified in several ways. Some important classifications of signals are: 1.4.1 Continuous-Time and Discrete-Time Signals Continuous-time signals are defined for a continuous of values of the independent variable. In the case of continuous-time signals, the independent variable t is continuous as shown Figure 1.5(a). Discrete-time signals are defined only at discrete times, and for these signals, the independent variable n takes on only a discrete set of amplitude values as shown in Figure 1.5(b). 1.4.2 Analog and Digital Signals An analog signal is a continuous-time signal whose amplitude can take any value in a continuous range. A digital signal is a discrete-time signal that can only have a discrete set of values. The process of converting a discrete-time signal into a digital signal is referred to as quantization. −0.5 0.5 1.5 2.5 3.5 1 2 3 4 0 0 2 4 6 8 Time a b Time index n Amplitude −0.5 0.5 1.5 2.5 3.5 1 2 3 4 0 Amplitude 10 12 14 16 0 2 4 6 8 10 12 14 16 Figure 1.5 (a) Continuous-time signal, (b) discrete-time signal 1.4 Classification of Signals 5
- 6. 1.4.3 Periodic and Aperiodic Signals A signal x(t) is said to be periodic with period T(a positive nonzero value), if it exhibits periodicity, i.e., x(t þ T) ¼ x(t), for all values of t as shown in Figure 1.6(a). Periodic signal has the property that it is unchanged by a time shift of T. A signal that does not satisfy the above periodicity property is called an aperiodic signal. The signal shown in Figure 1.6(b) is an example of an aperiodic signal. Example 1.2 For each of the following signals, determine whether it is periodic or aperiodic. If periodic, find the period. (i) x(t) ¼ 5 sin(2πt) (ii) x(t) ¼ 1 þ cos(4t þ 1) (iii) x(t) ¼ e2t (iv) x t ð Þ ¼ ej 5tþπ 2 ð Þ (v) x t ð Þ ¼ ej 5tþπ 2 ð Þe2t Solution (i) It is periodic signal, period ¼ 2π 2π ¼ 1: (ii) It is periodic, period ¼ 2π 4 ¼ π 2 (iii) It is aperiodic, (iv) It is periodic. period ¼ 2π 5 (v) Since x(t) is a complex exponential multiplied by a decaying exponential, it is aperiodic. Example 1.3 If a continuous-time signal x(t) is periodic, for each of the following signals, determine whether it is periodic or aperiodic. If periodic, find the period. (i) x1(t) ¼ x(2t) (ii) x2(t) ¼ x(t/2) Solution Let T be the period of x(t). Then, we have x t ð Þ ¼ x t þ T ð Þ (a) (b) 0 1 1 2 Time x(t) 0 −1 0 1 −0.5 0.5 0.05 0.1 Time (sec) Amplitude 0.2 0.15 Figure 1.6 (a) Periodic signal, (b) aperiodic signal 6 1 Introduction
- 7. (i) For x1(t) to be periodic, x 2t ð Þ ¼ x 2t þ T ð Þ x 2t þ T ð Þ ¼ x 2 t þ T 2 ¼ x1 t þ T 2 Since x1 t ð Þ ¼ x1 t þ T 2 , x1(t) is periodic with fundamental period T 2. As x1(t) is compressed version of x(t) by half, the period of x1(t) is also com- pressed by half. (ii) For x2(t) to be periodic, x t=2 ð Þ ¼ x t 2 þ T x t 2 þ T ¼ x 1 2 t þ 2T ð Þ ¼ x2 t þ 2T ð Þ Since x2(t) ¼ x2(t þ 2T), x2(t) is periodic with fundamental period 2T. As x2(t) is expanded version of x(t) by two, the period of x2(t) is also twice the period of x(t). Proposition 1.1 Let continuous-time signals x1(t) and x2(t) be periodic signals with fundamental periods T1 and T2, respectively. The signal x(t) that is a linear combi- nation of x1(t) and x2(t) is periodic if and only if there exist integers m and k such that mT1 ¼ kT2 and T1 T2 ¼ k m ¼ rational number ð1:2Þ The fundamental period of x(t) is given by mT1 ¼ kT2 provided that the values of m and k are chosen such that the greatest common divisor (gcd) between m and k is 1. Example 1.4 For each of the following signals, determine whether it is periodic or aperiodic. If periodic, find the period. (i) x(t) ¼ 2 cos(4πt) þ 3 sin(3πt) (ii) x(t) ¼ 2 cos(4πt) þ 3 sin(10t) Solution (i) Let x1(t) ¼ 2 cos(4πt) and x2(t) ¼ 3 sin(3πt). The fundamental period of x1(t) is T1 ¼ 2π 4π ¼ 1 2 1.4 Classification of Signals 7
- 8. The fundamental period of x2(t) is T2 ¼ 2π 3π ¼ 2 3 The ratio T1 T2 ¼ 1=2 2=3 ¼ 3 4 is a rational number. Hence, x(t) is a periodic signal. The fundamental period of the signal x(t) is 4T1 ¼ 3T2 ¼ 2 seconds. (ii) Let x1(t) ¼ 2 cos(4πt) and x2(t) ¼ 3 sin(10t). The fundamental period of x1(t) is T1 ¼ 2π 4π ¼ 1 2 The fundamental period of x2(t) is T2 ¼ 2π 10 ¼ π 5 The ratio T1 T2 ¼ 1=2 π=5 ¼ 5 2π is not a rational number. Hence, x(t) is an aperiodic signal. Example 1.5 Consider the signals x1 t ð Þ ¼ cos 2πt 5 þ 2 sin 8πt 5 x2 t ð Þ ¼ sin πt ð Þ Determine whether x3(t) ¼ x1(t)x2(t) is periodic or aperiodic. If periodic, find the period. Solution Decomposing signals x1(t) and x2(t) into sums of exponentials gives x1 t ð Þ ¼ 1 2 ej 2πt=5 ð Þ þ 1 2 ej 2πt=5 ð Þ þ ej 8πt=5 ð Þ j ej 8πt=5 ð Þ j x2 t ð Þ ¼ ej πt ð Þ 2j ej πt ð Þ 2j Then, x3 t ð Þ ¼ 1 4j ej 7πt=5 ð Þ 1 4j ej 3πt=5 ð Þ þ 1 4j ej 3πt=5 ð Þ 1 4j ej 7πt=5 ð Þ ej 13πt=5 ð Þ 2 þ ej 3πt=5 ð Þ 2 þ ej 3πt=5 ð Þ 2 ej 13πt=5 ð Þ 2 It is seen that all complex exponentials are powers of ej(π/5) . Hence, it is periodic. Period is 2π π=5 ¼ 10seconds: 8 1 Introduction
- 9. 1.4.4 Even and Odd Signals The continuous-time signal is said to be even when x(t) ¼ x(t). The continuous- time signal is said to be odd when x(t) ¼ x(t). Odd signals are also known as nonsymmetrical signals. Examples of even and odd signals are shown in Figure 1.7 (a) and Figure 1.7(b), respectively. Any signal can be expressed as sum of its even and odd parts as x t ð Þ ¼ xe t ð Þ þ xo t ð Þ ð1:3Þ The even part and odd part of a signal are xe t ð Þ ¼ x t ð Þ þ x t ð Þ 2 ð1:3aÞ xo t ð Þ ¼ x t ð Þ x t ð Þ 2 ð1:3bÞ Some important properties of even and odd signals are: (i) Multiplication of an even signal by an odd signal produces an odd signal. Proof Let y(t) ¼ xe(t)xo(t) y t ð Þ ¼ xe t ð Þxo t ð Þ ¼ xe t ð Þxo t ð Þ ¼ y t ð Þ ð1:4Þ Hence, y(t) is an odd signal. (ii) Multiplication of an even signal by an even signal produces an even signal. Proof Let y(t) ¼ xe(t)xe(t) y t ð Þ ¼ xe t ð Þxe t ð Þ ¼ xe t ð Þxe t ð Þ ¼ y t ð Þ ð1:5Þ Hence, y(t) is an even signal. 0 b A -b t x(t) (a) (b) A x(t) 0 b -A -b t Figure 1.7 (a) Even signal, (b) odd signal 1.4 Classification of Signals 9
- 10. (iii) Multiplication of an odd signal by an odd signal produces an even signal. Proof Let y(t) ¼ xo(t)xo(t) y t ð Þ ¼ x0 t ð Þxo t ð Þ ¼ xo t ð Þ ð Þ xo t ð Þ ð Þ ¼ xo t ð Þxo t ð Þ ¼ y t ð Þ Hence, y(t) is an even signal. It is seen from Figure 1.7(a) that the even signal is symmetric about the vertical axis, and hence ð b b xe t ð Þdt ¼ 2 ðb 0 xe t ð Þdt ð1:6Þ From Figure 1.6(b), it is also obvious that ð b b xo t ð Þdt ¼ 0 ð1:7Þ Eqs. (1.6) and (1.7) are valid for no impulse or its derivative at the origin. These properties are proved to be useful in many applications. Example 1.6 Find the even and odd parts of x(t) ¼ ej2t . Solution From Eq. (1.3), ej2t ¼ xe t ð Þ þ xo t ð Þ where xe t ð Þ ¼ x t ð Þ þ x t ð Þ 2 ¼ ej2t þ ej2t 2 ¼ cos 2t ð Þ xo t ð Þ ¼ x t ð Þ x t ð Þ 2 ¼ ej2t ej2t 2 ¼ j sin 2t ð Þ: Example 1.7 If xe(t) and xo(t) are the even and odd parts of x(t), show that ð1 1 x2 t ð Þdt ¼ ð1 1 x2 e t ð Þdt þ ð1 1 x2 o t ð Þdt ð1:8Þ 10 1 Introduction
- 11. Solution ð1 1 x2 t ð Þdt ¼ ð1 1 xe t ð Þ þ xo t ð Þ ð Þ2 dt ¼ ð1 1 x2 e t ð Þdt þ 2 ð1 1 xe t ð Þxo t ð Þdt þ ð1 1 x2 o t ð Þdt ¼ ð1 1 x2 e t ð Þdt þ ð1 1 x2 o t ð Þdt Since 2 ð1 1 xe t ð Þxo t ð Þdt ¼ 0 Example 1.8 For each of the following signals, determine whether it is even, odd, or neither (Figure 1.8) Solution By definition a signal is even if and only if x(t) ¼ x(t), while a signal is odd if and only if x(t) ¼ x(t). (a) It is readily seen that x(t) 6¼ x(t) for all t and x(t) 6¼ x(t) for all t; thus x(t) is neither even nor odd. (b) Since x(t) is symmetric about t ¼ 0, x(t) is even. (c) Since x(t) ¼ x(t), x(t) is odd in this case. -4 -2 2 2 4 x(t) t -2 2 2 x(t) (a) (b) (c) -2 -2 2 2 x(t) tt Figure 1.8 Signals of example 1.8 1.4 Classification of Signals 11
- 12. 1.4.5 Causal, Noncausal, and Anticausal Signal A causal signal is one that has zero values for negative time, i.e., t 0. A signal is noncausal if it has nonzero values for both the negative and positive times. An anticausal signal has zero values for positive time, i.e., t 0. Examples of causal, noncausal, and anticausal signals are shown in Figure 1.9(a), 1.9(b), and 1.9(c), respectively. Example 1.9 Consider the following noncausal continuous-time signal. Obtain its realization as causal signal. -0.5 0.5 x(t) 1 1 -1 t 0 Solution 0 0.5 1.5 x(t) 2 1 -1 t x(t) t x(t) t t x(t) (a) (b) (c) Figure 1.9 (a) Causal signal, (b) noncausal signal, (c) anticausal signal 12 1 Introduction
- 13. 1.4.6 Energy and Power Signals A signal x(t) with finite energy, which means that amplitude ! 0 as time ! 1, is said to be energy signal, whereas a signal x(t) with finite and nonzero power is said to be power signal. The instantaneous power p(t) of a signal x(t) can be expressed by p t ð Þ ¼ x2 t ð Þ ð1:9Þ The total energy of a continuous-time signal x(t) can be defined as E ¼ ð1 1 x2 t ð Þdt ð1:10aÞ for a complex valued signal E ¼ ð1 1 x t ð Þ j j2 dt ð1:10bÞ Since the power is the time average of energy, the average power is defined as P ¼ limT!1 1 T ðT=2 T=2 x2 t ð Þdt. The signal x(t) expressed by Eq. (1.11), which is shown in Figure 1.10(a), is an example of energy signal. x t ð Þ ¼ t 0 t 1 1 1 t 2 ( ð1:11Þ The energy of the signal is given by E ¼ ð1 1 x2 t ð Þdt ¼ ð1 0 t2 dt þ ð2 1 1dt ¼ 1 3 þ 1 ¼ 4 3 The signal x(t) shown in Figure 1.10(b) is an example of a power signal. The signal is periodic with period 2. Hence, averaging x2 (t) over infinitely large time interval is the same as averaging over one period, i.e., 2. Thus, the average power P is P ¼ 1 2 ð1 1 x2 t ð Þdt ¼ 1 2 ð1 1 4t2 dt ¼ 4 3 0 1 1 2 Time x(t) Figure 1.10(a) Energy signal 1.4 Classification of Signals 13
- 14. Thus, an energy signal has finite energy and zero average power, whereas a power signal has finite power and infinite energy. Example 1.10 Compute energy and power for the following signals, and determine whether each signal is energy signal, power signal, or neither. (i) x(t) ¼ 4sin(2πt), 1 t 1. (ii) x(t) ¼ 2e2|t| , 1 t 1. (iii) x t ð Þ ¼ 2 ffiffi t p t 1 0 t 1: 8 : (iv) x(t) ¼ eat for real value of a (v) x(t) ¼ cos (t) (vi) xðtÞ ¼ ej 2tþ π 4Þ ð Solution (i) E ¼ ð1 1 x t ð Þ j j2 dt ¼ ð1 1 4 sin 2πt ð Þ j j2 dt ¼ 16 ð1 1 1 cos 4πt ð Þ 2 dt ¼ 16 ð1 1 1 2 dt 8 ð1 1 cos 4πt ð Þdt ¼ 1 P ¼ limT!1 1 T ðT=2 T=2 x2 ðtÞdt ¼ limT!1 1 T ðT=2 T=2 16 sin 2 ð2πtÞdt ¼ limT!1 1 T ðT=2 T=2 16 1 cos ð4πtÞ 2 dt ¼ 16 limT!1 1 T ðT=2 T=2 1 2 dt 16 limT!1 1 T ðT=2 T=2 cos ð4πtÞ 2 dt ¼ 8 -4 -2 -2 2 2 4 t x(t) Figure 1.10(b) Power signal 14 1 Introduction
- 15. The energy of the signal is infinite, and its average power is finite; x(t) is a power signal. (ii) x(t) ¼ 2e2|t| E ¼ ð1 1 x t ð Þ j j2 dt ¼ ð1 1 2e2 t j j 2 dt ¼ 4 ð0 1 e4t dt þ 4 ð1 0 e4t dt ¼ 4 4 e4t 0 1 þ 4 4 e4t 1 0 ¼ 4 4 þ 4 4 ¼ 2 P ¼ limT!1 1 T ðT=2 T=2 x2 t ð Þdt ¼ limT!1 1 T ðT=2 T=2 2e2 t j j 2 dt ¼ 4 limT!1 1 T ð0 T=2 e4t dt þ 4 limT!1 1 T ðT=2 0 e4t dt ¼ 4 4 limT!1 1 T e4t 0 T=2 þ 4 4 limT!1 1 T e4t T=2 0 ¼ 4 4 limT!1 1 T 1 e2T þ 4 4 limT!1 1 T e2T 1 ¼ 0 þ 0 ¼ 0 The energy of the signal is finite, and its average power is zero; x(t) is an energy signal. (iii) x t ð Þ ¼ 2 ffiffi t p t 1 0 t 1: 8 : E ¼ ð1 1 x t ð Þ j j2 dt ¼ ð1 1 4 t dt ¼ 4ln t ½ 1 1 ¼ 1 1.4 Classification of Signals 15
- 16. P ¼ lim T!1 1 T ðT=2 T=2 x2 t ð Þdt ¼ lim T!1 1 T ðT=2 1 4 t dt ¼ 4 lim T!1 1 T ln t ½ 1T=2 ¼ 4 lim T!1 1 T ln T 2 1 T ln 1 ½ ¼ 4 lim T!1 1 T ln T 2 ¼ 4 lim T!1 ln T 2 T 0 B B @ 1 C C A Using L’Hospital’s rule, we see that the power of the signal is zero. That is P ¼ 4 lim T!1 ln T 2 T ¼ 4 lim T!1 2 T 1 ¼ 0 The energy of the signal is infinite and its average power is zero; x(t) is neither energy signal nor power signal. (iv) x(t) ¼ eat for real value of a E ¼ ð1 1 x t ð Þ j j2 dt ¼ ð1 1 eat j j 2 dt ¼ 1, P ¼ limT!1 1 T ðT=2 T=2 x2 t ð Þdt ¼ limT!1 1 T ðT=2 T=2 e2at dt ¼ lim T!1 eaT eaT 2aT ¼ lim T!1 eaT 2aT lim T!1 eaT 2aT ¼ lim T!1 eaT 2aT 0 Using L’Hospital’s rule, we see that the power of the signal is infinite. That is, P ¼ lim T!1 eaT 2aT ¼ lim T!1 eaT 2 ¼ 1 The energy of the signal is infinite and its average power is infinite; x(t) is neither energy signal nor power signal. (v) x(t) ¼ cos(t) E ¼ ð1 1 x t ð Þ j j2 dt ¼ ð1 1 cos 2 t ð Þdt ¼ 1, 16 1 Introduction
- 17. P ¼ limT!1 1 T ðT=2 T=2 x2 t ð Þdt ¼ limT!1 1 T ðT=2 T=2 cos 2 t ð Þdt ¼ limT!1 1 T ðT=2 T=2 1 þ cos 2t ð Þ 2 dt ¼ limT!1 1 T ðT=2 T=2 1 2 dt þ limT!1 1 T ðT=2 T=2 cos 2t ð Þ 2 dt ¼ 1 2 The energy of the signal is infinite and its average power is finite; x(t) is a power signal. (vi) x t ð Þ ¼ ej 2tþπ 4 ð Þ, x t ð Þ j j ¼ 1. E ¼ ð1 1 x t ð Þ j j2 dt ¼ ð1 1 dt ¼ 1, P ¼ limT!1 1 T ðT=2 T=2 x2 t ð Þdt ¼ limT!1 1 T ðT=2 T=2 1dt ¼ limT!11 ¼ 1 The energy of the signal is infinite and its average power is finite; x(t) is a power signal. Example 1.11 Consider the following signals, and determine the energy of each signal shown in Figure 1.11. How does the energy change when transforming a signal by time reversing, sign change, time shifting, or doubling it? t 2 2 x(t) t -2 2 (t) 4 t 2 2 ( ) t 2 -2 (t) t 2 4 ( ) Figure 1.11 Signals of example 1.11 1.4 Classification of Signals 17
- 18. Solution xðtÞ ¼ ( t 0 t 2 0 otherwise Ex ¼ ð1 1 jxðtÞj2 dt ¼ ð2 0 t2 dt ¼ t3 3 2 0 ¼ 8 3 x1ðtÞ ¼ ( t 2 t 0 0 otherwise Ex1 ¼ ð1 1 jx1ðtÞj2 dt ¼ ð0 2 t2 dt ¼ t3 3 0 2 ¼ 8 3 x2ðtÞ ¼ ( t 0 t 2 0 otherwise Ex2 ¼ ð1 1 jx2ðtÞj2 dt ¼ ð2 0 t2 dt ¼ t3 3 2 0 ¼ 8 3 x3ðtÞ ¼ ( ðt 2Þ 2 t 4 0 otherwise Ex3 ¼ ð1 1 jx3ðtÞj2 dt ¼ ð2 0 ðt 2Þ2 dt ¼ ð4 2 ðt2 4t þ 4Þdt ¼ t3 3 2t2 þ 4t 4 2 ¼ 8 3 x4ðtÞ ¼ ( 2t 0 t 2 0 otherwise Ex4 ¼ ð1 1 jx4ðtÞj2 dt ¼ ð2 0 4t2 dt ¼ 4 t3 3 2 0 ¼ 32 3 The time reversal, sign change, and time shifting do not affect the signal energy. Doubling the signal quadruples its energy. Similarly, it can be shown that the energy of k x(t) is k2 Ex. Proposition 1.2 The sum of two sinusoids of different frequencies is the sum of the power of individual sinusoids regardless of phase. Proof Let us consider a sinusoidal signal x(t) ¼ Acos(Ωt + θ). The power of x(t) is given by 18 1 Introduction
- 19. P ¼ limT!1 1 T ðT=2 T=2 x2 ðtÞdt ¼ limT!1 1 T ðT=2 T=2 A2 cos 2 ðΩt þ θÞdt ¼ limT!1 1 2T ðT=2 T=2 A2 ½1 þ cos 2 ð2Ωt þ 2θÞdt ¼ limT!1 A2 2T ðT=2 T=2 dt þ ðT=2 T=2 cos 2Ωt þ 2θ ð Þdt # ¼ A2 2T ½T þ 0 ¼ A2 2 ð1:12Þ Thus, a sinusoid signal of amplitude A has a power A2 2 regardless of the values of its frequency Ω and phase θ. Now, consider the following two sinusoidal signals: x1 t ð Þ ¼ A1 cos Ω1t þ θ1 ð Þ x2 t ð Þ ¼ A2 cos Ω2t þ θ2 ð Þ Let xs t ð Þ ¼ x1 t ð Þ þ x2 t ð Þ The power of the sum of the two sinusoidal signals is given by Ps ¼ limT!1 1 T ðT 2 T 2 x2 s ðtÞ ¼ limT!1 1 T ðT=2 T=2 ½A1cos ðΩ1t þ θ1Þ þ A2cos ðΩ2t þ θ2Þ2 dt ¼ limT!1 1 T ðT 2 T 2 A2 1cos 2 ðΩ1t þ θ1Þdt þ limT!1 1 T ðT 2 T 2 A2 2cos 2 ðΩ2t þ θ2Þdt þ limT!1 2A1A2 T ðT 2 T 2 cos ðΩ1t þ θ1Þcos ðΩ2t þ θ2Þdt The first and second integrals on the right-hand side are the powers of the two sinusoidal signals, respectively, and the third integral becomes zero since cos Ω1t þ θ1 ð Þ cos Ω2t þ θ2 ð Þ ¼ cos Ω1 þ Ω2 ð Þt þ θ1 þ θ2 ð Þ ½ þ cos Ω1 Ω2 ð Þt þ θ1 θ2 ð Þ ½ Hence, Ps ¼ A2 1 2 þ A2 2 2 ð1:13Þ 1.4 Classification of Signals 19
- 20. It can be easily extended to sum of any number of sinusoids with distinct frequencies 1.4.7 Deterministic and Random Signals For any given time, the values of deterministic signal are completely specified as shown in Figure 1.12(a). Thus, a deterministic signal can be described mathemati- cally as a function of time. A random signal takes random statistically characterized random values as shown in Figure 1.12(b) at any given time. Noise is a common example of random signal. 1.5 Basic Continuous-Time Signals 1.5.1 The Unit Step Function The unit step function is defined as u t ð Þ ¼ 1 t 0 0 t 0 ð1:14Þ which is shown in Figure 1.13. It should be noted that u(t) is discontinuous at t ¼ 0. 1 u(t) t Figure 1.13 Unit step function 1 1 −1 0.5 −0.5 0 0.8 0.6 0.4 0.2 0 0 50 0 0.05 0.15 0.1 Time (sec) Amplitude 0.2 100 150 (a) (b) Figure 1.12 (a) Deterministic signal, (b) random signal 20 1 Introduction
- 21. 1.5.2 The Unit Impulse Function The unit impulse function also known as the Dirac delta function, which is often referred as delta function is defined as δ t ð Þ ¼ 0, t 6¼ 0 ð1:15aÞ ð1 1 δ t ð Þ ¼ 1: ð1:15bÞ The delta function shown in Figure 1.14(b) can be evolved as the limit of the rectangular pulse as shown in Figure 1.14(a). δ t ð Þ ¼ lim Δ!0 pΔ t ð Þ ð1:16Þ As the width Δ ! 0, the rectangular function converges to the impulse function δ(t) with an infinite height at t ¼ 0, and the total area remains constant at one. Some Special Properties of the Impulse Function • Sampling property If an arbitrary signal x(t) is multiplied by a shifted impulse function, the product is given by x t ð Þδ t t0 ð Þ ¼ x t0 ð Þδ t t0 ð Þ ð1:17aÞ implying that multiplication of a continuous-time signal and an impulse function produces an impulse function, which has an area equal to the value of the continuous-time function at the location of the impulse. Also, it follows that for t0 ¼ 0, x t ð Þδ t ð Þ ¼ x 0 ð Þδ t ð Þ ð1:17bÞ • Shifting property ð1 1 x t ð Þδ t t0 ð Þdt ¼ x t0 ð Þ ð1:18Þ pΔ(t) (a) (b) 1/Δ Δ/2 −Δ/2 d(t) t t 0 Figure 1.14 (a) Rectangular pulse, (b) unit impulse 1.5 Basic Continuous-Time Signals 21
- 22. • Scaling property δ at þ b ð Þ ¼ 1 a j j δ t þ b a ð1:19Þ • The unit impulse function can be obtained by taking the derivative of the unit step function as follows: δ t ð Þ ¼ du t ð Þ dt ð1:20Þ • The unit step function is obtained by integrating the unit impulse function as follows: u t ð Þ ¼ ð t 1 δ t ð Þdt ð1:21Þ 1.5.3 The Ramp Function The ramp function is defined as r t ð Þ ¼ t t 0 0 t 0 ð1:22aÞ which can also be written as r t ð Þ ¼ tu t ð Þ ð1:22bÞ The ramp function is shown in Figure 1.15. 1.5.4 The Rectangular Pulse Function The continuous-time rectangular pulse function is defined as Figure 1.15 The ramp function 22 1 Introduction
- 23. x t ð Þ ¼ 1 t j j T1 0 t j j T1 ð1:23Þ which is shown in Figure 1.16. 1.5.5 The Signum Function The signum function also called sign function is defined as sgn t ð Þ ¼ 1 t 0 0 t ¼ 0 1 t 0 8 : ð1:24Þ which is shown in Figure 1.17. 1.5.6 The Real Exponential Function A real exponential function is defined as x t ð Þ ¼ Aeσt ð1:25Þ where both A and σ are real. If σ is positive, x(t) is a growing exponential signal. The signal x(t) is exponentially decaying for negative σ. For σ ¼ 0, the signal x(t) is equal to a constant. Exponentially decaying signal and exponentially growing signal are shown in Figure 1.18(a) and (b), respectively. 0 1 1 - 1 t x(t) Figure 1.16 The rectangular pulse function -1 0 1 t x(t)= Figure 1.17 The signum function 1.5 Basic Continuous-Time Signals 23
- 24. 1.5.7 The Complex Exponential Function A real exponential function is defined as x t ð Þ ¼ Ae σþjΩ ð Þt ð1:26Þ Hence x t ð Þ ¼ Aeσt ejΩt ð1:26aÞ Using Euler’s identity ejΩt ¼ cos Ωt ð Þ þ j sin Ωt ð Þ ð1:27Þ Substituting Eq. (1.27) in Eq. (1.26a), we obtain x t ð Þ ¼ Aeσt cos Ωt ð Þ þ j sin Ωt ð Þ ð Þ ð1:28Þ Real sine function and real cosine function can be expressed by the trigonometric identities as cos Ωt ð Þ ¼ ejΩt þejΩt 2 and sin Ωt ð Þ ¼ ejΩt ejΩt 2j 1.5.8 The Sinc Function The continuous-time sinc function is defined as Sinc t ð Þ ¼ sin πt ð Þ πt ð1:28Þ which is shown in Figure 1.19 A 0 t x(t) A 0 t x(t) (a) (b) Figure 1.18 Real exponential function. (a) Decaying, (b) growing 24 1 Introduction
- 25. Example 1.12 State whether the following signals are causal, anticausal, or noncausal. (a) x(t) ¼ e2t u(t) (b) x(t) ¼ tu(t) t(u(t 1) þ e(1t) u(t 1)) (c) x(t) ¼ et cos (2πt)u(1 t) Solution (a) 1 0.25 x(t) 1 t It is causal since x(t) ¼ 0 for t 0 (b) 1 1 t x(t) It is causal since x(t) ¼ 0 for t 0 Figure 1.19 The sinc function 1.5 Basic Continuous-Time Signals 25
- 26. (c) (c ) It is non causal since for t0 u(1-t) 1 t Example 1.13 Determine and plot the even and odd components of the following continuous-time signal x t ð Þ ¼ tu t þ 2 ð Þ tu t 1 ð Þ Solution x t ð Þ ¼ tu t þ 2 ð Þ tu t 1 ð Þ x t ð Þ ¼ tu t þ 2 ð Þ þ tu t þ 1 ð Þ -2 -2 1 x(t) 1 t 2 -2 -2 1 x(-t) 1 t xeðtÞ ¼ xðtÞ þ xðtÞ 2 ¼ 1 2 t uðt þ 2Þ uðt 1Þ uðt þ 2Þ þ uðt þ 1Þ 26 1 Introduction
- 27. -0.5 2 -1 -2 1 1 ) ( t xo t ð Þ ¼ x t ð Þ x t ð Þ 2 ¼ 1 2 t u t þ 2 ð Þ u t 1 ð Þ þ u t þ 2 ð Þ u t þ 1 ð Þ ð Þ -0.5 2 -1 -2 1 1 t Example 1.14 Simplify the following expressions: (a) sin t t2þ3 δ t ð Þ (b) 4þjt 3jt δ t 1 ð Þ (c) Ð1 1 4t 3 ð ÞÞδ t 1 ð Þdt Solution (a) sin 0 ð Þ 0þ3 δ t ð Þ ¼ 0 (b) 4þjt 3jt δ t 1 ð Þ ¼ 4þj 3j δ t 1 ð Þ (c) Ð1 1 4 1 ð Þ 3 ð ÞÞδ t 1 ð Þdt ¼ Ð1 1 1δ t 1 ð Þdt ¼ 1: 1.5 Basic Continuous-Time Signals 27
- 28. 1.6 Generation of Continuous-Time Signals Using MATLAB An exponentially damped sinusoidal signal can be generated using the following MATLAB command: x(t) ¼ A ∗ sin (2 ∗ pi ∗ f0 ∗ t + θ) ∗ exp (a ∗ t)where a is positive for decaying exponential. Example 1.15 Write a MATLAB program to generate the following exponentially damped sinusoidal signal. x(t) ¼ 5 sin (2πt)e0.4t 10 t 10 Solution The following MATLAB program generates the exponentially damped sinusoidal signal as shown in Figure 1.20. MATLAB program to generate exponentially damped sinusoidal signal clear all;clc; x =inline('5*sin(2*pi*1*t).*exp(-.4*t)','t'); t = (-10:.01:10); plot(t,x(t)); xlabel ('t (seconds)'); ylabel ('Ámplitude'); -10 -8 -6 -4 -2 0 2 4 6 8 10 -250 -200 -150 -100 -50 0 50 100 150 200 250 t (seconds) Ámplitude Figure 1.20 Exponentially damped sinusoidal signal with exponential parameter a ¼ 0.4. 28 1 Introduction
- 29. Example 1.16 Generate unit step function over [5,5] using MATLAB Solution The following MATLAB program generates the unit step function over [5,5] as shown in Figure 1.21. MATLAB program to generate unit step function over [5,5] clear all;clc; u=inline('(t=0)','t'); t=-5:0.01:5; plot(t,u(t)) xlabel ('t (seconds)'); ylabel ('Ámplitude') axis([-5 5 -2 2]) Example 1.17 Generate the following rectangular pulse function rect(t) using MATLAB: rect t 10 ¼ 1, 5 t 5 0, elsewhere Solution The following MATLAB program generates the rectangular pulse func- tion as shown in Figure 1.22. -5 -4 -3 -2 -1 0 1 2 3 4 5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 t (seconds) Ámplitude Figure 1.21 Unit step function 1.6 Generation of Continuous-Time Signals Using MATLAB 29
- 30. MATLAB program to generate rectangular pulse function clear all;clc; u=inline('(t=-5) (t5)','t'); t=-10:0.01:10; plot(t,u(t)) xlabel ('t (seconds)'); ylabel ('Ámplitude') axis([-10 10 -2 2]) 1.7 Typical Signal Processing Operations 1.7.1 Correlation Correlation of signals is necessary to compare one reference signal with one or more signals to determine the similarity between them and to determine additional infor- mation based on the similarity. Applications of cross correlation include cross- spectral analysis, detection of signals buried in noise, pattern matching, and delay measurements. -10 -8 -6 -4 -2 0 2 4 6 8 10 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2 t (seconds) Ámplitude Figure 1.22 Rectangular pulse function 30 1 Introduction
- 31. 1.7.2 Filtering Filtering is basically a frequency domain operation. Filter is used to pass certain band of frequency components without any distortion and to block other frequency components. The range of frequencies that is allowed to pass through the filter is called the passband, and the range of frequencies that is blocked by the filter is called the stopband. A low-pass filter passes all low-frequency components below a certain specified frequency Ωc, called the cutoff frequency, and blocks all high-frequency components above Ωc. A high-pass filter passes all high-frequency components above a certain cutoff frequency Ωc and blocks all low-frequency components below Ωc. A band-pass filter passes all frequency components between two cutoff frequencies Ωc1 and Ωc2 where Ωc1 Ωc2 and blocks all frequency components below the frequency Ωc1 and above the frequency Ωc2. A band-stop filter blocks all frequency components between two cutoff frequencies Ωc1 and Ωc2 where Ωc1 Ωc2 and passes all frequency components below the frequency Ωc1 and above the frequency Ωc2. Notch filter is a narrow band-stop filter used to suppress a particular frequency, called the notch frequency. 1.7.3 Modulation and Demodulation Transmission media, such as cables and optical fibers, are used for transmission of signals over long distances; each such medium has a bandwidth that is more suitable for the efficient transmission of signals in the high-frequency range. Hence, for transmission over such channels, it is necessary to transform the low-frequency signal to a high-frequency signal by means of a modulation operation. The desired low-frequency signal is extracted by demodulating the modulated high-frequency signal at the receiver end. 1.7.4 Transformation The transformation is the representation of signals in the frequency domain, and inverse transform converts the signals from the frequency domain back to the time domain. The transformation provides the spectrum analysis of a signal. From the knowledge of the spectrum of a signal, the bandwidth required to transmit the signal can be determined. The transform domain representations provide additional insight into the behavior of the signal and make it easy to design and implement algorithms, such as those for filtering, convolution, and correlation. 1.7 Typical Signal Processing Operations 31
- 32. 1.7.5 Multiplexing and Demultiplexing Multiplexing is used in situations where the transmitting media is having higher bandwidth, but the signals have lower bandwidth. Thus, multiplexing is the process in which multiple signals, coming from different sources, are combined and trans- mitted over a single channel. Multiplexing is performed by multiplexer placed at the transmitter end. At the receiving end, the composite signal is separated by demul- tiplexer performing the reverse process of multiplexing and routes the separated signals to their corresponding receivers or destinations. In electronic communications, the two basic forms of multiplexing are time- division multiplexing (TDM) and frequency-division multiplexing (FDM). In time-division multiplexing, transmission time on a single channel is divided into non-overlapped time slots. Data streams from different sources are divided into units with same size and interleaved successively into the time slots. In frequency-division multiplexing (FDM), numerous low-frequency narrow bandwidth signals are com- bined for transmission over a single communication channel. A different frequency is assigned to each signal within the main channel. Code-division multiplexing (CDM) is a communication networking technique in which multiple data signals are combined for simultaneous transmission over a common frequency band. 1.8 Some Examples of Real-World Signals and Systems 1.8.1 Audio Recording System An audio recording system shown in Figure 1.23(a) takes an audio or speech as input and converts the audio signal into an electrical signal, which is recorded on a magnetic tape or a compact disc. An example of recorded voice signal is shown in Figure 1.23(b). (a) (b) Audio output signal Audio Recording System Figure 1.23 (a) Audio recording system, (b) the recorded voice signal “don’t fail me again” 32 1 Introduction