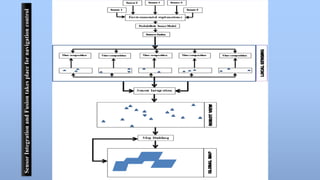
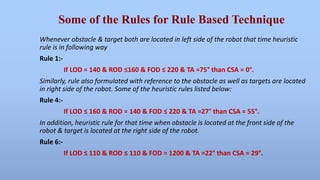
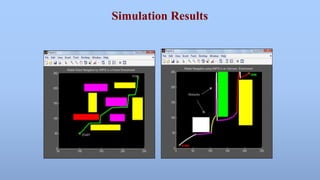
This document presents a study on rule-based navigation for autonomous mobile robots in uncertain environments. It describes using a rule-based sensor network approach where rules are formulated based on sensor data to guide the robot's movements. Simulation results show the rule-based technique is effective for path planning to reach targets while avoiding obstacles. The approach is also compared to other techniques to prove its ability to safely and efficiently navigate environments.