Download as PDF, PPTX
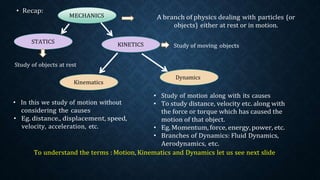
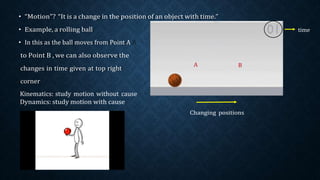
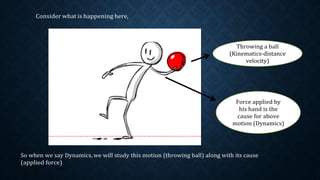
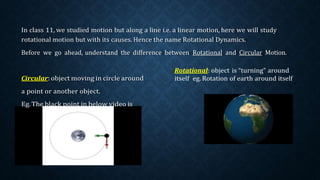
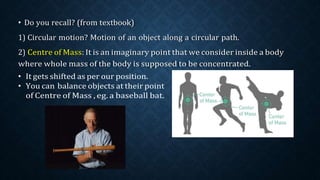

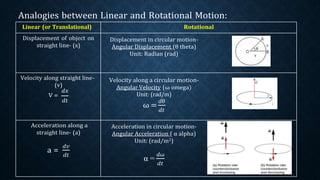
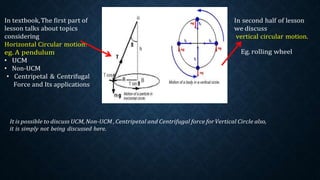
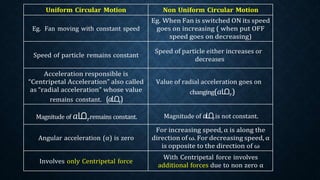

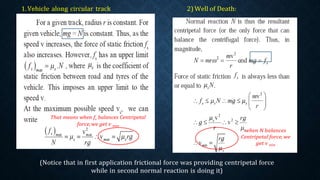
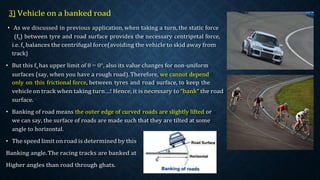

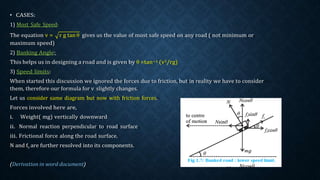


The document discusses the concepts of motion, focusing on kinematics and dynamics, including the study of circular motion, forces acting on objects, and their applications. It outlines the differences between linear and rotational motion, and explains real and pseudo forces. Additionally, it covers practical applications such as vehicles on circular tracks and banked roads, with formulas for safe speeds and banking angles.