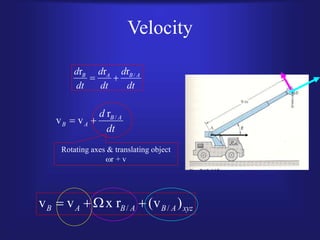
1) The document discusses relative and non-relative motions of connected rigid bodies using examples of pin connections. It defines relative velocity and acceleration and discusses the Coriolis acceleration that arises from rotating frames of reference.
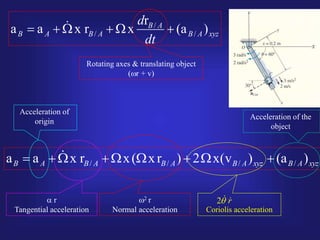
2) An example problem is presented to calculate the relative acceleration of point C with respect to point D, where D is rotating with an angular velocity ω about the z-axis and translating with a velocity v. Expressions are derived for the tangential, normal and Coriolis components of acceleration.
3) The values obtained for this example are aC/D = -6.1 m/s2, ωDE = 3 rad/s, and αDE = -5 rad/s




![xyz
O
C
xyz
O
C
O
C
O
C
O
C )
a
(
)
v
(
x
2
)
r
x
(
x
r
x
a
a /
/
/
/
xyz
O
C
O
C
O
C )
v
(
r
x
v
v /
/
}
k
2
{
}
k
3
{
0
a
0
v
O
O
2
/
/
/
/
}
i
3
{
)
(
/
}
i
2
{
)
v
(
}
i
2
.
0
{
r
s
m
a
s
m
m
rel
O
C
rel
O
C
O
C
i
2
)
i
2
.
0
(
x
)
k
3
(
0
v
)
v
(
r
x
v
v /
/
C
xyz
O
C
O
C
O
C
}
j
6
.
0
i
2
{
v
C
xyz
O
C
xyz
O
C
O
C
O
C
O
C )
a
(
)
v
(
x
2
)
r
x
(
x
r
x
a
a /
/
/
/
i
3
)
i
2
(
x
)
k
3
(
2
)]
i
2
.
0
(
[(-3k)x
x
)
k
3
(
)
i
2
.
0
(
x
)
k
2
(
0
a
C
2
m/s
12.4j}
-
{1.2i
a
i
3
j
12
i
80
.
1
j
4
.
0
0
a
C
C](https://image.slidesharecdn.com/rotatingaxis-230824060221-e80f96ff/85/Rotating-axis-ppt-13-320.jpg)
![Example 16-20
xyz
D
C
D
C
D
C )
v
(
r
x
v
v /
/
xyz
D
C
xyz
D
C
D
C
D
C
D
C )
a
(
)
v
(
x
2
)
r
x
(
x
r
x
a
a /
/
/
/
k
k
0
a
0
v
DE
DE
D
D
2
/
/
/
/
/
/
i
)
(
/
i
)
v
(
}
i
4
.
0
{
r
s
m
a
a
s
m
m
D
C
xyz
D
C
D
C
xyz
D
C
D
C
s
m
r A
C
AB
C /
}
j
2
.
1
i
2
.
1
{
)
j
4
.
0
i
4
.
0
x(
)
k
3
(
x
v /
2
2
/
2
/ /
}
j
2
.
5
i
2
{
)
j
4
.
0
i
4
.
0
(
)
3
(
)
j
4
.
0
i
4
.
0
x(
)
k
4
(
x
a s
m
r
r A
C
AB
A
C
AB
C
xyz
D
C
D
C
D
C )
v
(
r
x
v
v /
/
i
)
(
)
i
4
.
0
(
x
)
k
(
0
j
2
.
1
i
2
.
1 / xyz
D
C
DE
s
m
xyz
D
C /
2
.
1
)
( /
s
rad
DE /
3
xyz
D
C
xyz
D
C
D
C
D
C
D
C )
a
(
)
v
(
x
2
)
r
x
(
x
r
x
a
a /
/
/
/
i
)
i
2
.
1
x(
)
k
3
(
2
)]
i
4
.
0
(
x
)
k
3
[(
x
)
k
3
(
)
i
4
.
0
(
x
)
k
(
0
j
2
.
5
i
2 / D
C
DE a
2
/ /
6
.
1 s
m
a D
C
2
2
/
5
/
5 s
rad
s
rad
DE
aC/D = ?
DE = ?
DE= ?](https://image.slidesharecdn.com/rotatingaxis-230824060221-e80f96ff/85/Rotating-axis-ppt-15-320.jpg)




































































