Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
TF
Uploaded by
Tomoya Fujita
PPTX, PDF
175 views
Real-Time Workshop Recap
ROSCon 2019 Real-Time Workshop Re:cap by Geoffrey Biggs
Technology
◦
Related topics:
Real-Time Innovations
•
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 10
2
/ 10
3
/ 10
4
/ 10
5
/ 10
6
/ 10
7
/ 10
8
/ 10
9
/ 10
10
/ 10
More Related Content
PDF
GR-CITRUSの紹介
by
三七男 山本
PDF
Gitを使ったRoute53の管理
by
Sugawara Genki
PDF
ET2016 小さなRubyボード GR-CITRUSの紹介
by
三七男 山本
PDF
ET2016展示パネル
by
三七男 山本
PDF
Building Static Website With Github And Jekyll
by
Yoji Shidara
PDF
Rubinius Under a Microscope
by
高広 内山
PDF
RubyではじめるIoT(Wakayama.rb活動報告)
by
三七男 山本
PDF
Rubyボードハンズオンテキスト
by
三七男 山本
GR-CITRUSの紹介
by
三七男 山本
Gitを使ったRoute53の管理
by
Sugawara Genki
ET2016 小さなRubyボード GR-CITRUSの紹介
by
三七男 山本
ET2016展示パネル
by
三七男 山本
Building Static Website With Github And Jekyll
by
Yoji Shidara
Rubinius Under a Microscope
by
高広 内山
RubyではじめるIoT(Wakayama.rb活動報告)
by
三七男 山本
Rubyボードハンズオンテキスト
by
三七男 山本
What's hot
PDF
Wakayama.rbボードの使い方
by
三七男 山本
PDF
Rubyの実装をRubiniusで便利
by
Yutaka Tachibana
PDF
ルネサスナイト10発表資料 Rubyで作るラムネシュータ
by
三七男 山本
ODP
Iron rubyとsinatraで作るデスクトップアプリ
by
Yamamoto Kazuhisa
PDF
Ruby関西76 gr citrusの使い方#2
by
三七男 山本
PDF
Rubymotion
by
jewel12
ODP
Rubyのバージョン(鳥取ruby会)
by
Kei Matsunaga
Wakayama.rbボードの使い方
by
三七男 山本
Rubyの実装をRubiniusで便利
by
Yutaka Tachibana
ルネサスナイト10発表資料 Rubyで作るラムネシュータ
by
三七男 山本
Iron rubyとsinatraで作るデスクトップアプリ
by
Yamamoto Kazuhisa
Ruby関西76 gr citrusの使い方#2
by
三七男 山本
Rubymotion
by
jewel12
Rubyのバージョン(鳥取ruby会)
by
Kei Matsunaga
Similar to Real-Time Workshop Recap
PDF
01 ROS2 実用化に関するサーベイ ROS2勉強合宿 @別府温泉
by
Mori Ken
PDF
Rosのリアルタイムツールの紹介
by
gakky1667
PDF
NEDO特別講座 ロボット共通プラットフォーム講習会 (1)
by
NoriakiAndo
PDF
ROSによる今後のロボティクスのあり方
by
Mori Ken
PDF
つながるロボット 〜分散協調ロボットの開発を加速化するROSの紹介〜
by
Hideki Takase
PPTX
ロボットシステムのつくりかた 〜Robot Operating Systemというアプローチ〜
by
Hideki Takase
PDF
ROS2のリアルタイム化に挑む WG初参加
by
Atsushi Hasegawa
PDF
NEDO講座 MoveIt! チュートリアル 第1部
by
openrtm
PDF
Mobilitydev2019 10 31_slideshare
by
Tier_IV
PDF
ROSCon2019 Macau 参加報告 Akihiko Tsukuda
by
AkihikoTsukuda1
PDF
IROS 2019 参加報告詳細版
by
Yasunori Ozaki
PPTX
ROScon 2017 参加報告
by
Yutaro ISHIDA
PDF
Yu Sasaki Bachelor Thesis
by
pflab
PPTX
Robot Simulation_Unity × ROS2_OpenShift.pptx
by
TakagiYoshinori
PDF
ROSCon2019 参加報告:オーバビュー+α
by
Hideki Takase
PDF
2013 summercamp 05
by
openrtm
01 ROS2 実用化に関するサーベイ ROS2勉強合宿 @別府温泉
by
Mori Ken
Rosのリアルタイムツールの紹介
by
gakky1667
NEDO特別講座 ロボット共通プラットフォーム講習会 (1)
by
NoriakiAndo
ROSによる今後のロボティクスのあり方
by
Mori Ken
つながるロボット 〜分散協調ロボットの開発を加速化するROSの紹介〜
by
Hideki Takase
ロボットシステムのつくりかた 〜Robot Operating Systemというアプローチ〜
by
Hideki Takase
ROS2のリアルタイム化に挑む WG初参加
by
Atsushi Hasegawa
NEDO講座 MoveIt! チュートリアル 第1部
by
openrtm
Mobilitydev2019 10 31_slideshare
by
Tier_IV
ROSCon2019 Macau 参加報告 Akihiko Tsukuda
by
AkihikoTsukuda1
IROS 2019 参加報告詳細版
by
Yasunori Ozaki
ROScon 2017 参加報告
by
Yutaro ISHIDA
Yu Sasaki Bachelor Thesis
by
pflab
Robot Simulation_Unity × ROS2_OpenShift.pptx
by
TakagiYoshinori
ROSCon2019 参加報告:オーバビュー+α
by
Hideki Takase
2013 summercamp 05
by
openrtm
More from Tomoya Fujita
PDF
Sony robotics overview
by
Tomoya Fujita
PPTX
ROS 2 Embedded WG SPRESENSE RDC
by
Tomoya Fujita
PDF
SRT Prometheus Exporter Introduction.pdf
by
Tomoya Fujita
PDF
aibo introduction at ROSCon2018@Madrid
by
Tomoya Fujita
PPTX
ROSCo2019 MoveIt Workshop Recap
by
Tomoya Fujita
PPTX
Eclipse Iceoryx Overview
by
Tomoya Fujita
PDF
ROS/ROS2 Distributed System with Kubernetes
by
Tomoya Fujita
PPTX
20230110-Alibaba Cloud Developer Summit-Sony.v3.pptx
by
Tomoya Fujita
PDF
ROS 2 Content Filtered Topics
by
Tomoya Fujita
PDF
Robolaunch-Cloud Robotics Platform - ROS with Kubernetes.pdf
by
Tomoya Fujita
PDF
Kerbernetes Robotics Distributed System Deep Dive
by
Tomoya Fujita
PDF
Kubernetes Robotics Edge Cluster System
by
Tomoya Fujita
PDF
ROS-TSC-ros-k8s.20230309.pdf
by
Tomoya Fujita
PPTX
Kuberenetes Robotics Distributed System
by
Tomoya Fujita
Sony robotics overview
by
Tomoya Fujita
ROS 2 Embedded WG SPRESENSE RDC
by
Tomoya Fujita
SRT Prometheus Exporter Introduction.pdf
by
Tomoya Fujita
aibo introduction at ROSCon2018@Madrid
by
Tomoya Fujita
ROSCo2019 MoveIt Workshop Recap
by
Tomoya Fujita
Eclipse Iceoryx Overview
by
Tomoya Fujita
ROS/ROS2 Distributed System with Kubernetes
by
Tomoya Fujita
20230110-Alibaba Cloud Developer Summit-Sony.v3.pptx
by
Tomoya Fujita
ROS 2 Content Filtered Topics
by
Tomoya Fujita
Robolaunch-Cloud Robotics Platform - ROS with Kubernetes.pdf
by
Tomoya Fujita
Kerbernetes Robotics Distributed System Deep Dive
by
Tomoya Fujita
Kubernetes Robotics Edge Cluster System
by
Tomoya Fujita
ROS-TSC-ros-k8s.20230309.pdf
by
Tomoya Fujita
Kuberenetes Robotics Distributed System
by
Tomoya Fujita
Recently uploaded
PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
PDF
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
PDF
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
PDF
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
PDF
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
PDF
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
PDF
PMBOK 7th Edition_Project Management Process_WF Type Development
by
akipii ogaoga
PDF
PMBOK 7th Edition Project Management Process Scrum
by
akipii ogaoga
PDF
PMBOK 7th Edition_Project Management Context Diagram
by
akipii ogaoga
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
FY2025 IT Strategist Afternoon I Question-1 Balanced Scorecard
by
akipii ogaoga
PMBOK 7th Edition_Project Management Process_WF Type Development
by
akipii ogaoga
PMBOK 7th Edition Project Management Process Scrum
by
akipii ogaoga
PMBOK 7th Edition_Project Management Context Diagram
by
akipii ogaoga
Real-Time Workshop Recap
1.
Doing Real-Time with
ROS 2: Capabilities and Challenges ROSCon 2019 workshop report https://www.apex.ai/roscon2019 Geoffrey Biggs
2.
ワークショップの目的 • ROS 2のリアルタイム可能性周り情報共有 •
最近の
3.
Doing real-time with
ROS 2: Capabilities and Challenges • ROS 2のリアルタイム機能のオーバービューと現状報告 • 特に例で必要性を説明した • 自動運転 • ドローン • トラックの自動駐車 • 倉庫ロボットの安全性 • 農業ロボット • 現在のROS 2のリアルタイム 可能性が知りたいなら読むべき
4.
Lessons learned on
real-time and security • セキュリティーについての話は少ない • でもROS自体についての情報も少ない • ネットワークレーヤーのリアルタイム性 • DDSのジッター • タイムシンクロナイズ
5.
Real Time Hardware •
制御レベルで具体的にどうやってリアルタイムを果たすかの話 • かなり具体的に! • リアルタイム初心者にオススメな発表 • ハードウェアの関わりも説明した • Time Sensitive Networking (TSN)の 話も出るから特に面白かった
6.
Safely in time:
Real-time and safety-critical software development • なぜリアルタイム性は大事かの説明 • すなわち安全性のため • そしてどうそれを果たすかの概念を説明 • 文字ばっかり!つまらない!
7.
ROS 2 Execution •
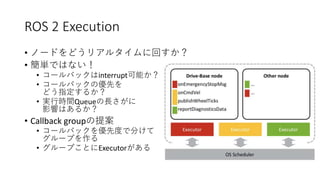
ノードをどうリアルタイムに回すか? • 簡単ではない! • コールバックはinterrupt可能か? • コールバックの優先を どう指定するか? • 実行時間Queueの長さがに 影響はあるか? • Callback groupの提案 • コールバックを優先度で分けて グループを作る • グループことにExecutorがある
8.
ROS 2 Static
Executor • 新しく提案されたExecutor • 現在のExecutorはオーバーヘッドが悪い • ループごとに新しいwait-setを作らないといけない • Static executorは動的に登録されているノードなどに変更がない との前提
9.
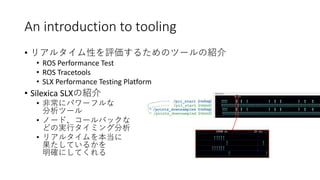
An introduction to
tooling • リアルタイム性を評価するためのツールの紹介 • ROS Performance Test • ROS Tracetools • SLX Performance Testing Platform • Silexica SLXの紹介 • 非常にパワーフルな 分析ツール • ノード、コールバックな どの実行タイミング分析 • リアルタイムを本当に 果たしているかを 明確にしてくれる
10.
Summary • リアルタイムサポートはまだ完璧ではない • が!たくさんの人と会社が取り掛かっていて、あっと言う間に できそう! •
コアライブラリだけでなくツールも!
Download