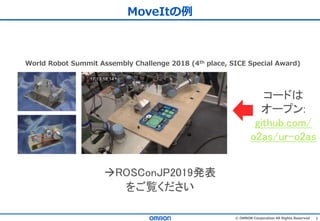
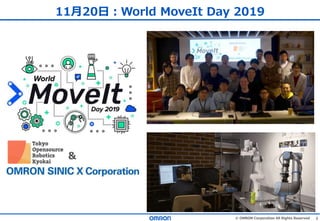
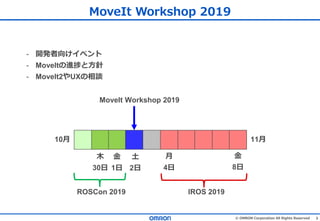
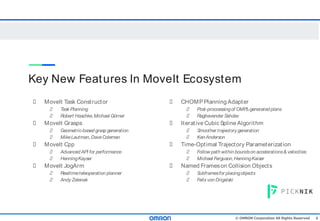
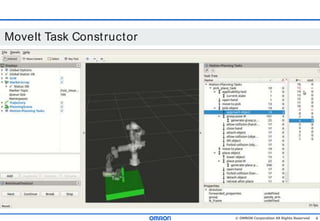
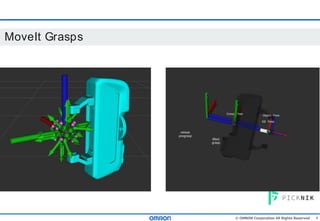
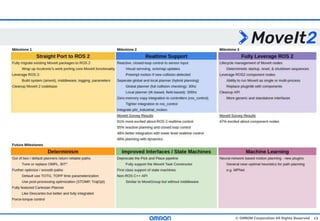
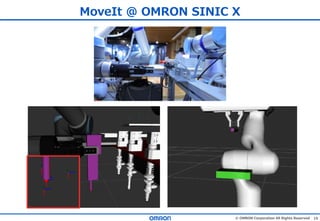
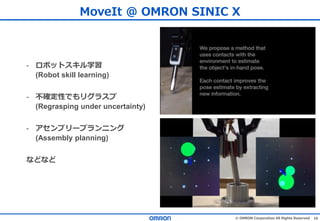
Felix von Drigalski reported on his participation in the MoveIt Workshop 2019. The workshop covered new features in the MoveIt ecosystem like the MoveIt Task Constructor and MoveIt Grasps. Progress was also discussed on porting MoveIt to ROS2 and roadmaps for the future, including real-time robotics integration and robot skill learning. Felix also discussed how OMRON SINIC X is using MoveIt for applications such as assembly planning and regrasping under uncertainty.






































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)


















