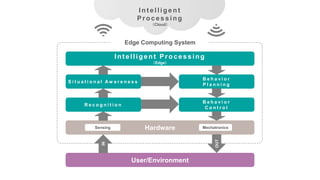
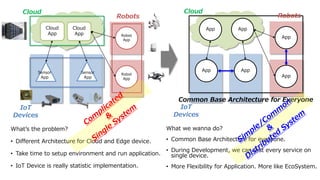
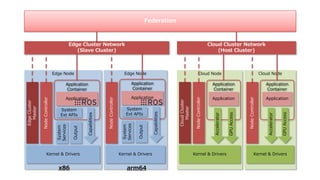
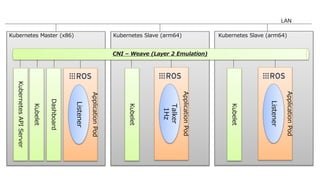
This document discusses using Kubernetes to manage a distributed robotics system across edge and cloud computing environments. It introduces Tomoya Fujita from Sony Corporation and provides an overview of robot operating systems, Sony's robotics architecture, and the problems of developing applications across different edge and cloud environments. It then proposes using Kubernetes to provide a common base architecture and development environment for robotics applications across edge nodes, cloud nodes, and different hardware platforms. Key features discussed include running applications as containers, virtual device plugins, node discovery, and a circulatory functioning system.