![Introduction. B´zier Trajectory Deformation (BTD) in Mobile Robots and Obstacles. Simulations Results. Conclusions and Future Works.
e
Definitions
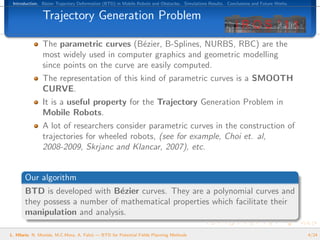
Definition
A B´zier Curve is defined as,
e
n
α(u) = Pi · Bi,n (u) (1)
i=0
n is the Order of the B´zier curve.
e
n
Bi,n (u) = i u i (1 − u)n−i Bernstein Basis
u ∈ [0, 1] is the Intrinsic Parameter.
(n + 1) Control Points, Pi such that i = 0, 1, · · · , n.
L. Hilario, N. Mont´s, M.C.Mora, A. Falc´ — BTD for Potential Fields Planning Methods
e o 8/24](https://image.slidesharecdn.com/realtimebeziertrajectorydeformation-120608055725-phpapp02/85/Real-Time-Bezier-Trajectory-Deformation-8-320.jpg)
![Introduction. B´zier Trajectory Deformation (BTD) in Mobile Robots and Obstacles. Simulations Results. Conclusions and Future Works.
e
Definitions
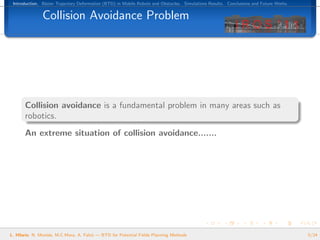
The intrinsic parameter, u, is non-dimensional.
In order to use a B´zier curve as a trajectory, this parameter must be
e
redefined as a time variable, associating each curve position (robot
position) with a time instant t ∈ [t0 , tf ], where t0 and tf are the
initial and final trajectory instants.
The definition of the B´zier curve has to change:
e
Definition
n
α(t) = Pi · Bi,n (t); t ∈ [t0 , tf ] (2)
i=0
In this case, the definition of the Bernstein Basis is:
−t
Bi,n (t) = n ( tt−t00 )i ( ttff−t0 )n−i such that i = 0, 1, · · · , n
i f −t
L. Hilario, N. Mont´s, M.C.Mora, A. Falc´ — BTD for Potential Fields Planning Methods
e o 9/24](https://image.slidesharecdn.com/realtimebeziertrajectorydeformation-120608055725-phpapp02/85/Real-Time-Bezier-Trajectory-Deformation-9-320.jpg)
![Introduction. B´zier Trajectory Deformation (BTD) in Mobile Robots and Obstacles. Simulations Results. Conclusions and Future Works.
e
Definitions
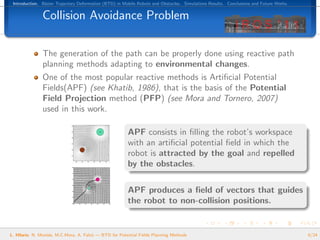
Definition
A Modified B´zier curve is defined as,
e
n
Sε (α(t)) := (Pi + εi ) · Bi,n (t); t ∈ [t0 , tf ] (3)
i=0
To deform a given B´zier curve describing a Trajectory, the control
e
points must be changed and the perturbation, εi , of every control
point must be computed.
L. Hilario, N. Mont´s, M.C.Mora, A. Falc´ — BTD for Potential Fields Planning Methods
e o 10/24](https://image.slidesharecdn.com/realtimebeziertrajectorydeformation-120608055725-phpapp02/85/Real-Time-Bezier-Trajectory-Deformation-10-320.jpg)
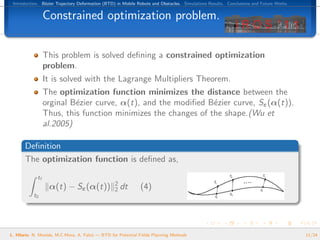
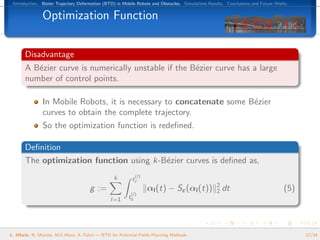
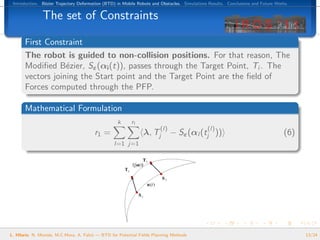
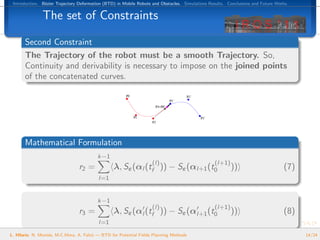
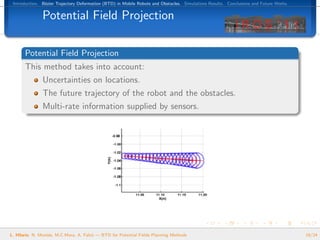
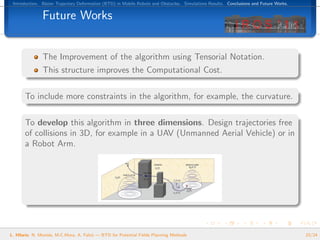

The document describes a technique called Bézier Trajectory Deformation (BTD) for modifying a Bézier curve trajectory to avoid obstacles while navigating a mobile robot. BTD uses potential field methods to generate a field of vectors, which are then used to perturb the control points of the Bézier curve and deform the trajectory away from obstacles. The deformation is formulated as an optimization problem to minimize changes to the trajectory shape. Simulations show BTD can efficiently compute modified trajectories in real-time by solving a linear system of equations. The technique helps enable reactive obstacle avoidance for mobile robots using smooth parametric curve trajectories.







![[Download] rev chapter-5-june26th](https://cdn.slidesharecdn.com/ss_thumbnails/downloadrev-chapter-5-june26th-100803111359-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)