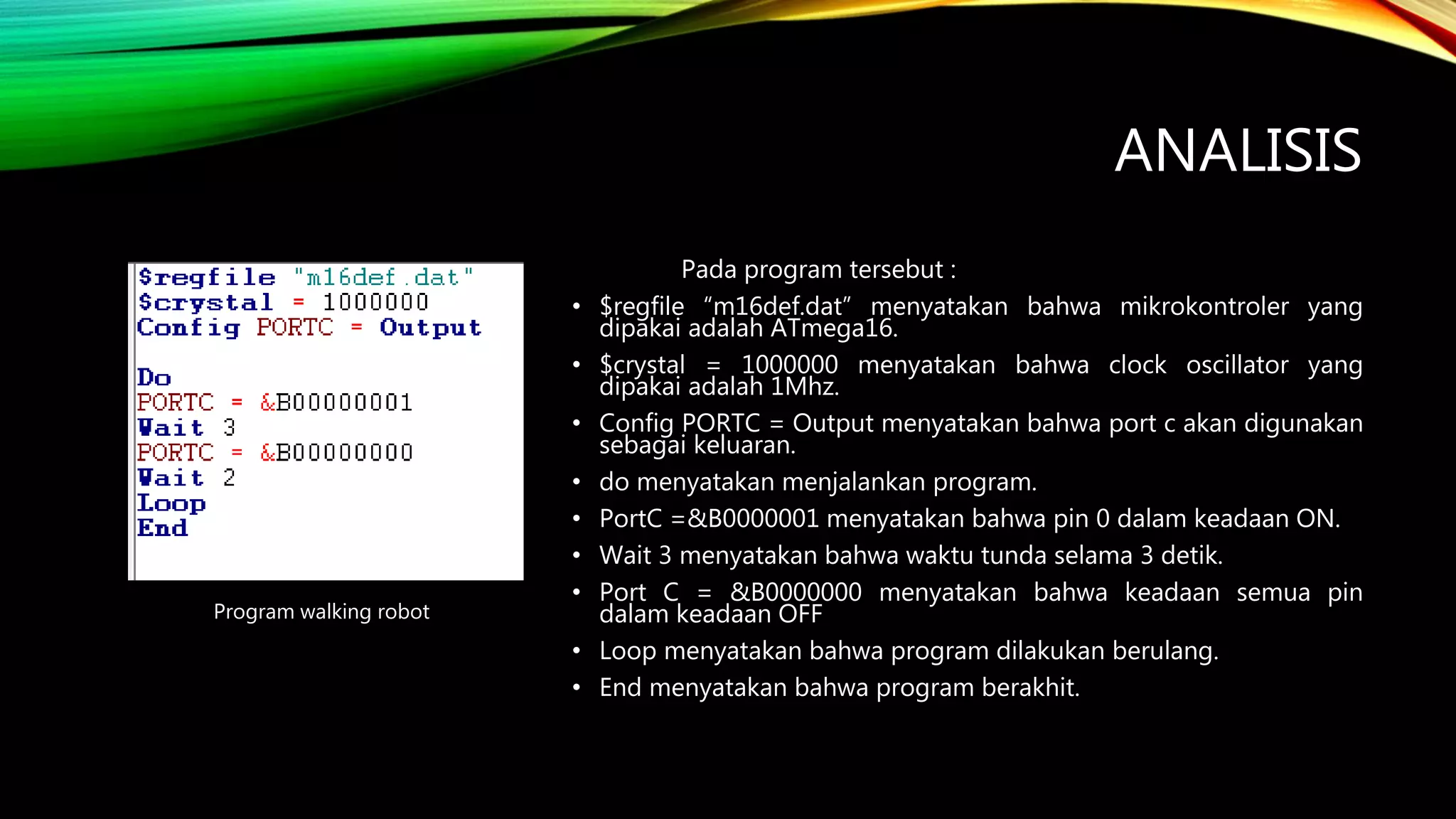
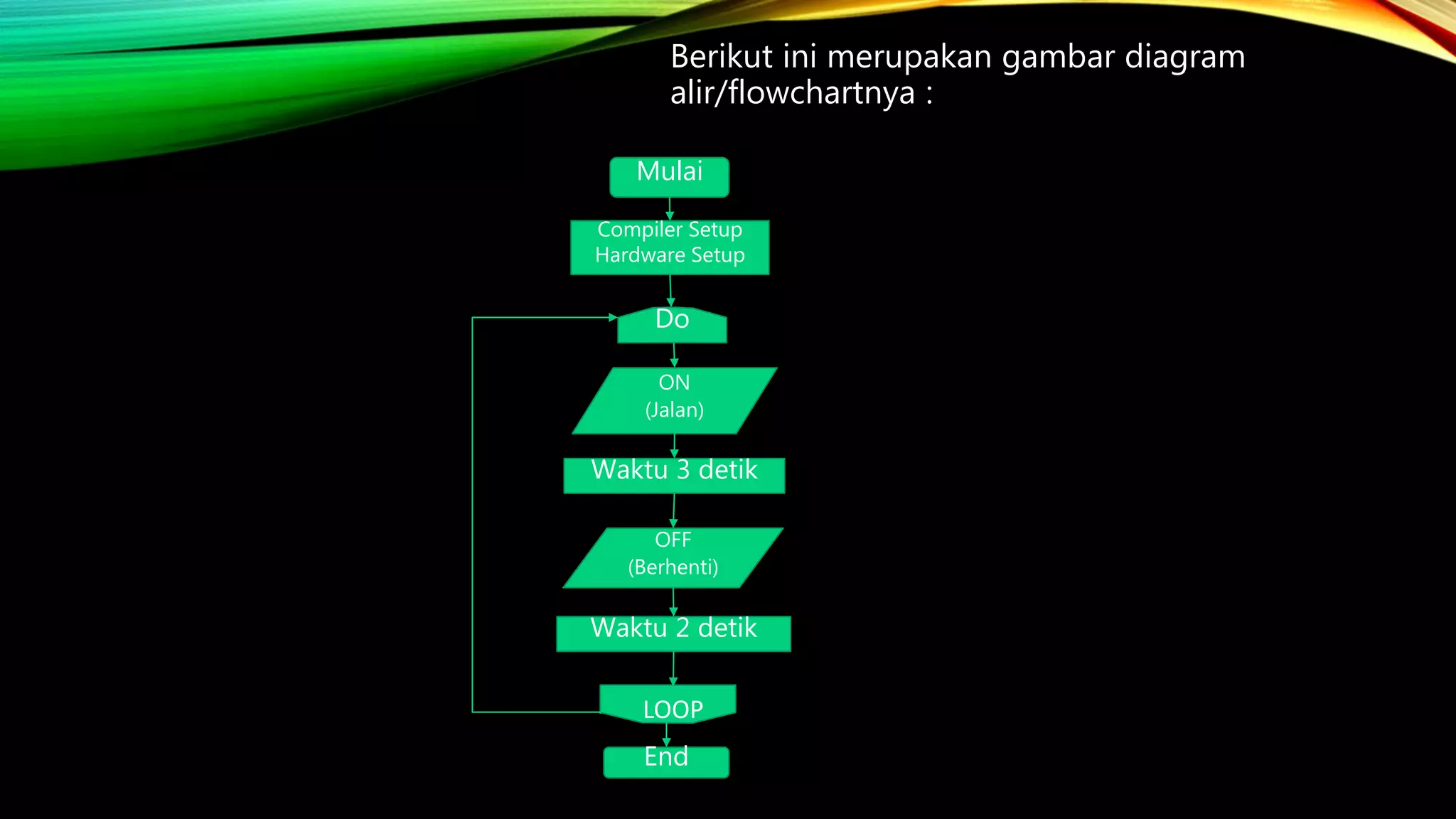
Dokumen ini menjelaskan tentang pengendalian walking robot menggunakan mikrokontroler atmega16 dengan bantuan software Bascom AVR. Diterangkan proses pemrograman dan komponen yang diperlukan, serta langkah-langkah untuk meng-upload program ke mikrokontroler. Analisis program mencakup konfigurasi, pengaturan port, dan logika dasar operasi robot.