Ringkasan dokumen tersebut adalah:
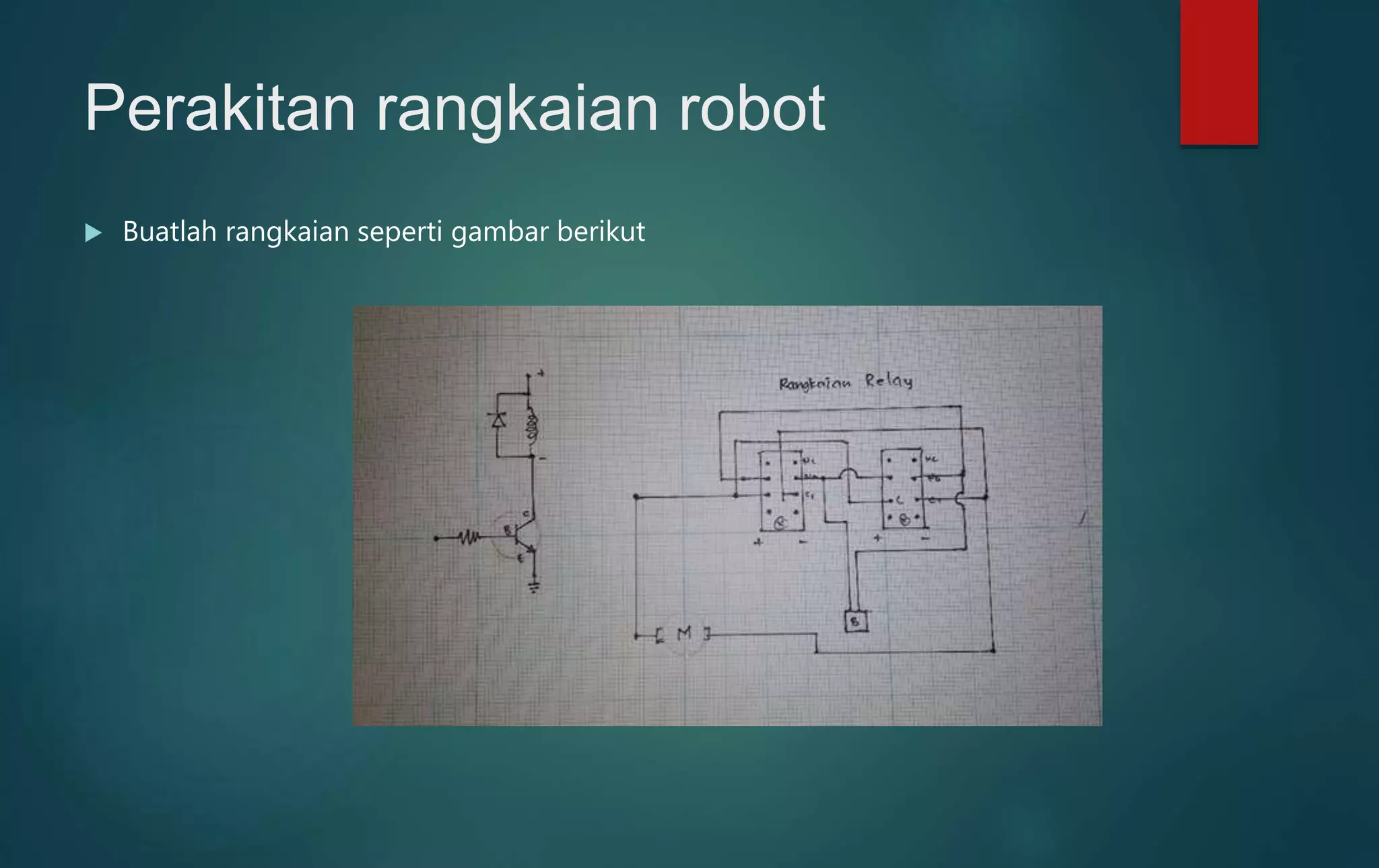
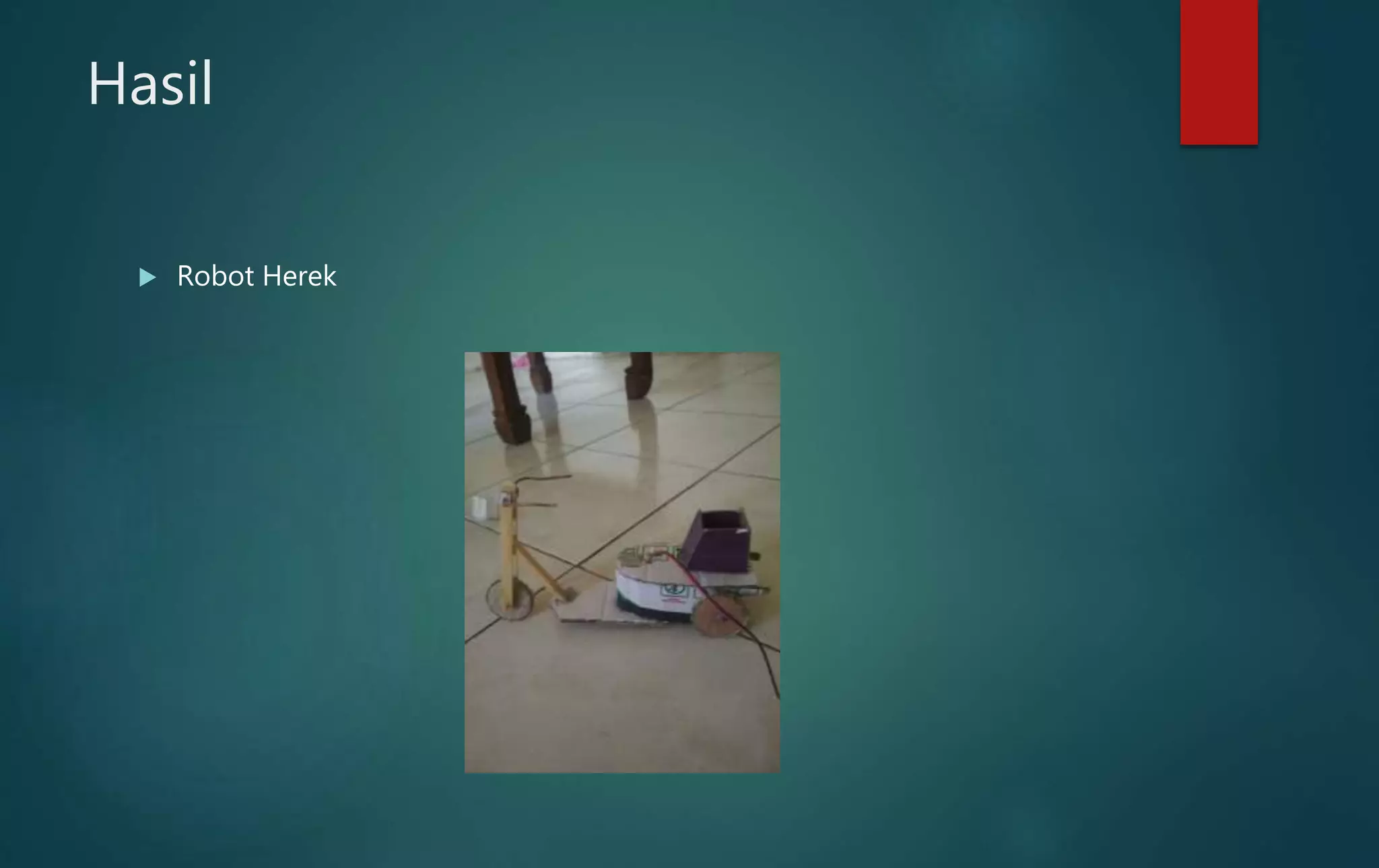
(1) Dokumen tersebut membahas tentang pembuatan robot dari modifikasi kardus atau karton menggunakan motor DC dan mikrokontroler;
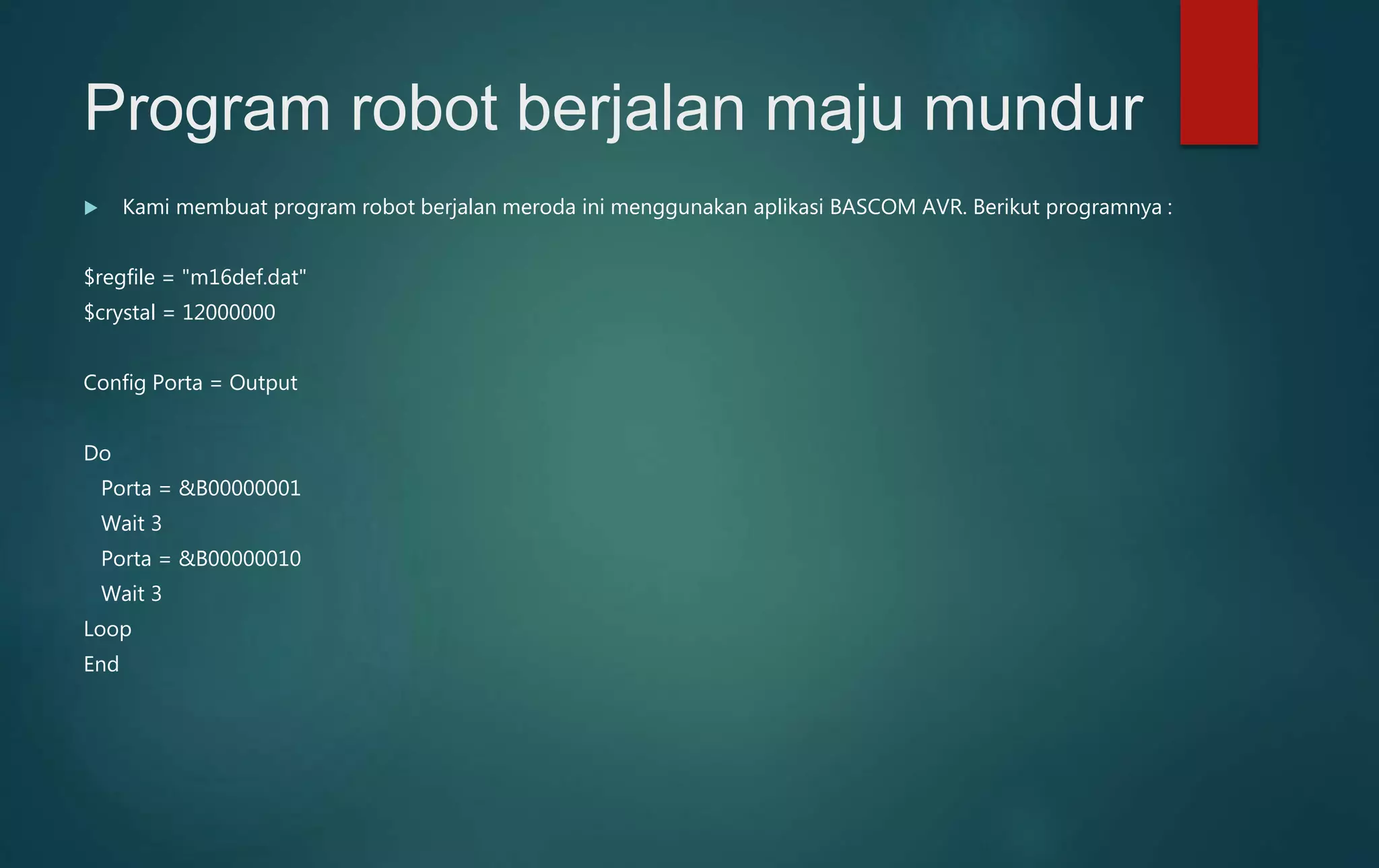
(2) Robot tersebut dapat diatur kecepatannya dan dikendalikan untuk berjalan maju mundur menggunakan program BASCOM;
(3) Robot tersebut dibuat untuk memenuhi tugas kuliah dan pembelajaran mahasiswa tentang perakitan robot.