使用上のご注意
• この改造はミニ四駆のスピードアップを目
的としていません。
o ミニ四駆のスピードはモーターと電池、ガイドロー
ラー、タイヤに依存します。
• 公式大会には出場できません。
o ArduinoとHブリッジモジュールがタミヤから発売さ
れれば、出場できる可能性があります。
• 隠し機能が搭載されています。
o ソースコードを読むとわかりますが、無駄にバック
出来ます。
• 組立には高度なテクニックが必要です。
o Arduino Pro Miniを埋め込むために肉抜きのテクニ
ックが必要です。
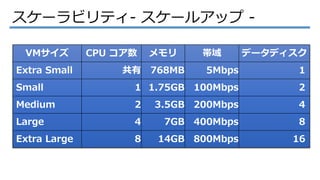
スケーラビリティ- スケールアップ -
VMサイズ CPU コア数 メモリ 帯域 データディスク
Extra Small 共有 768MB 5Mbps 1
Small 1 1.75GB 100Mbps 2
Medium 2 3.5GB 200Mbps 4
Large 4 7GB 400Mbps 8
Extra Large 8 14GB 800Mbps 16








































































![[Cloud OnAir] Talks by DevRel Vol.5 アプリケーションのモダナイゼーション 2020年9月3日 放送](https://cdn.slidesharecdn.com/ss_thumbnails/ffffffffffffffff-200903090943-thumbnail.jpg?width=640&height=640&fit=bounds)




