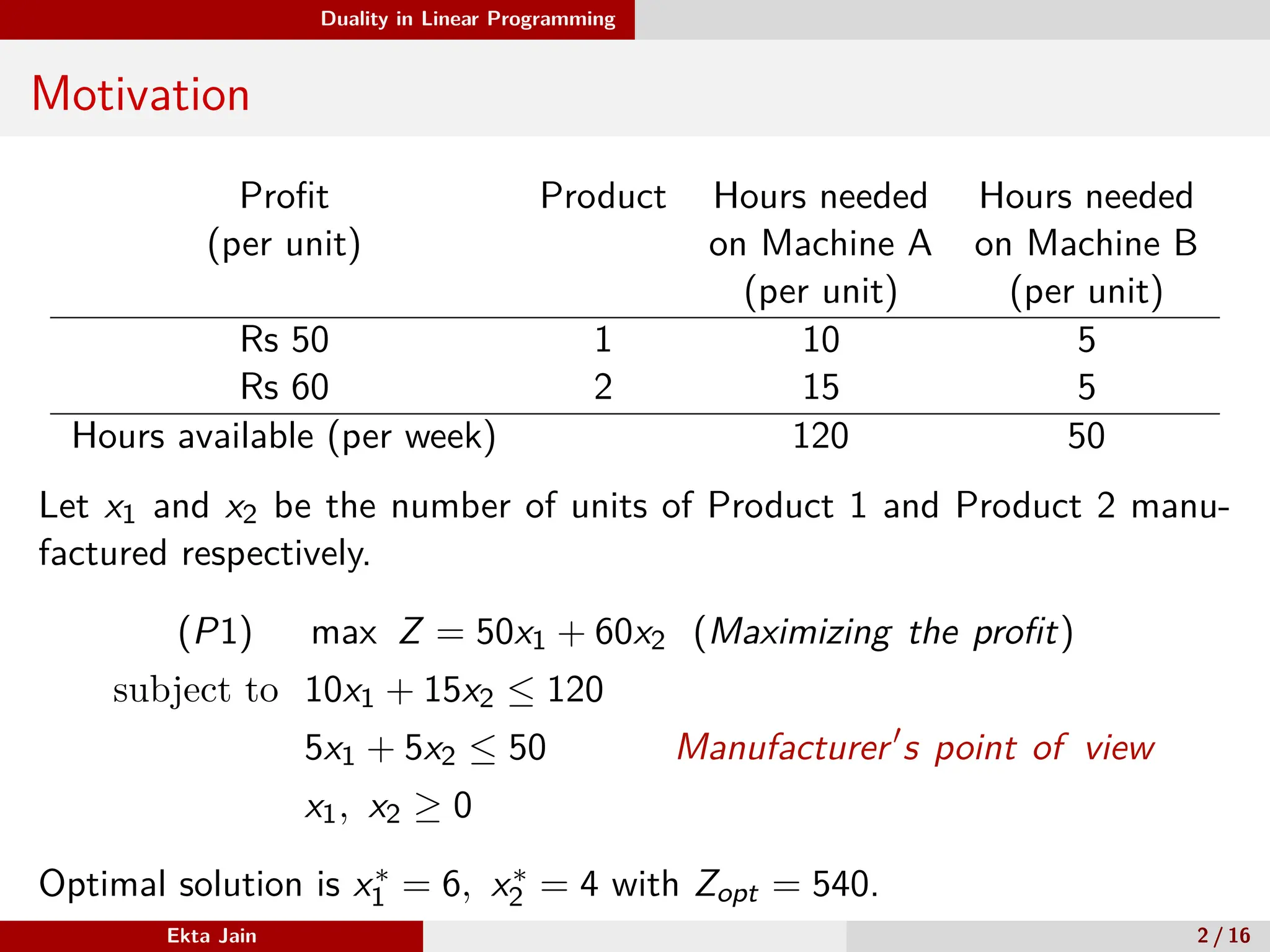
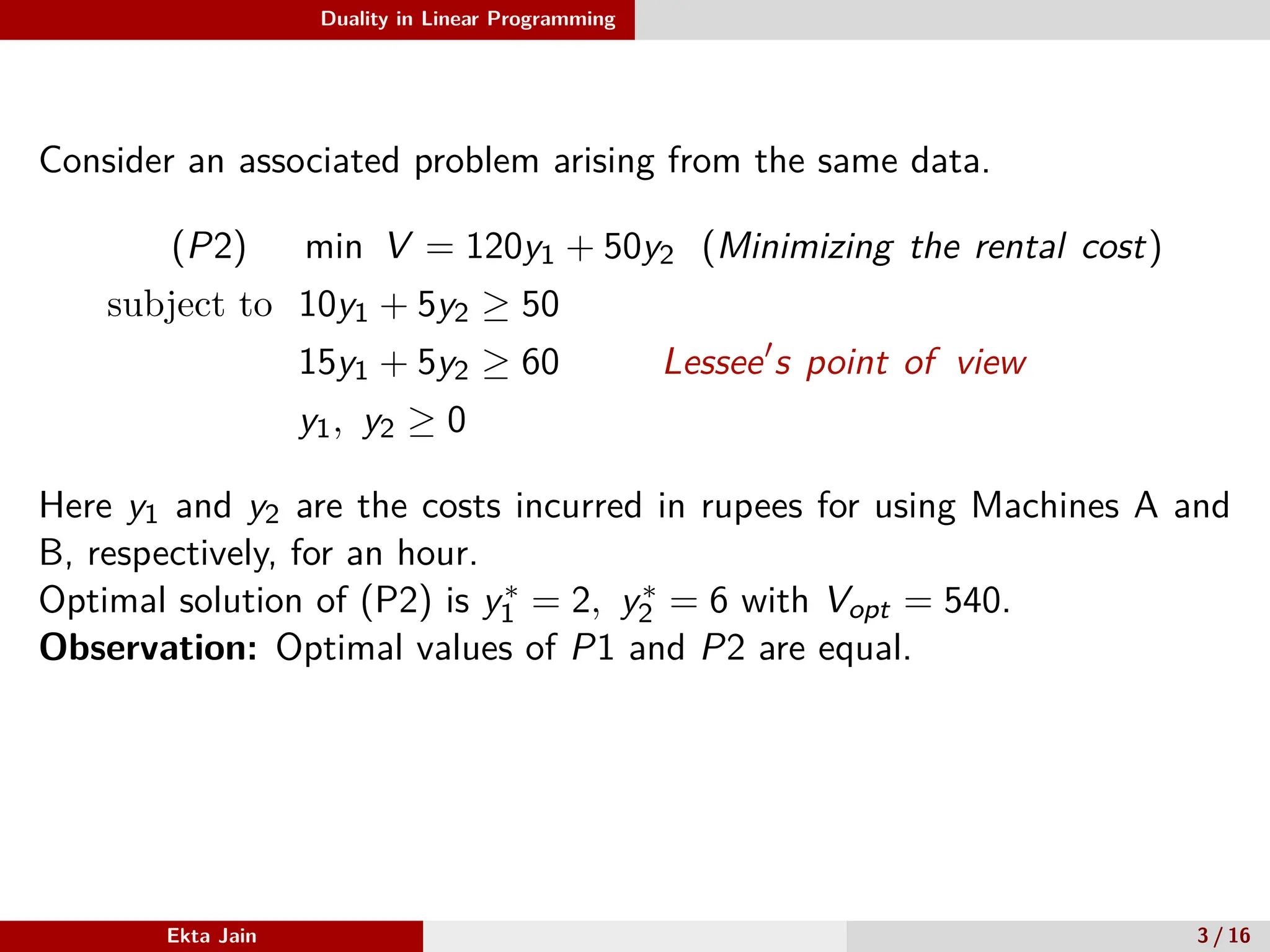
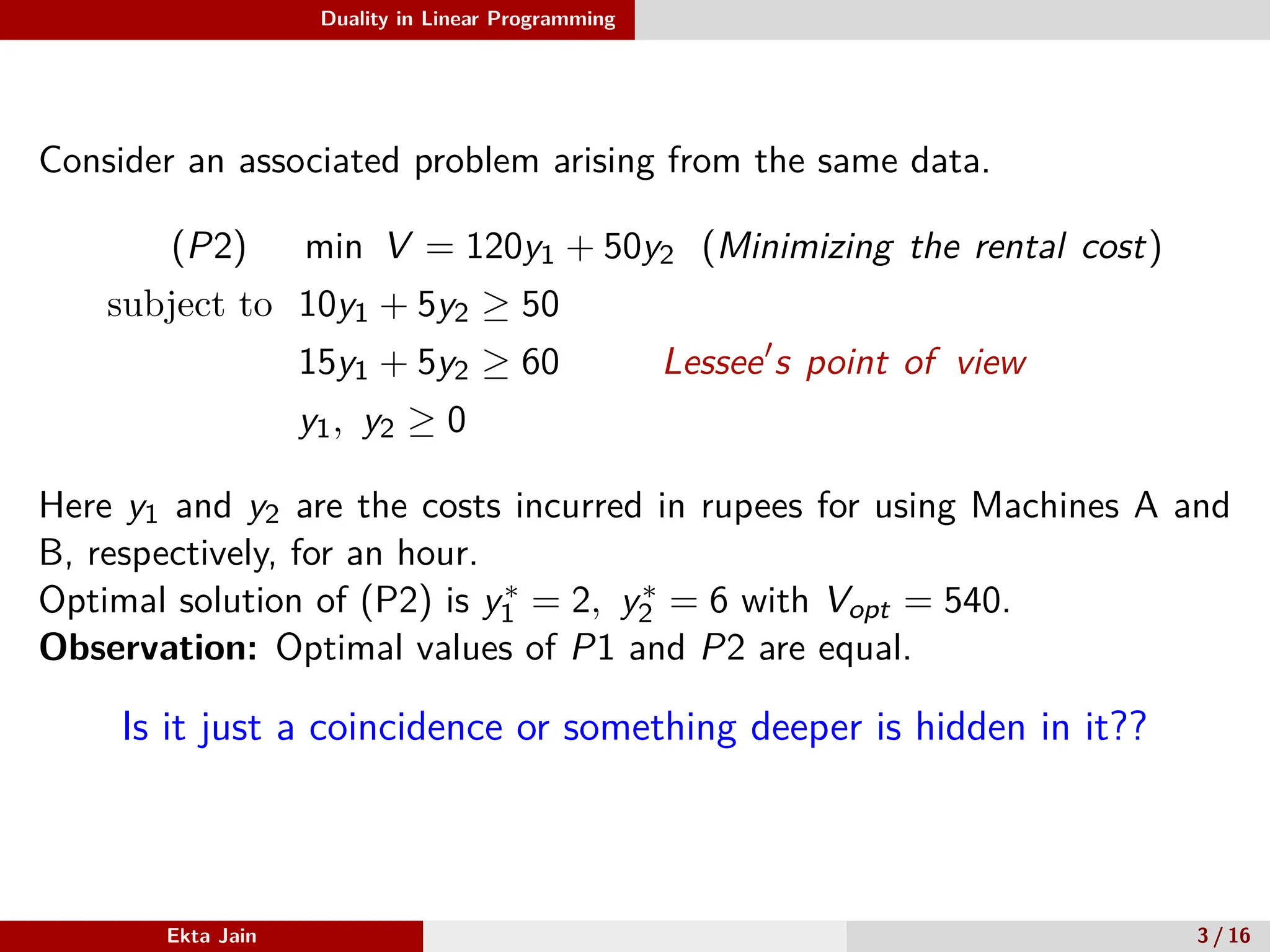
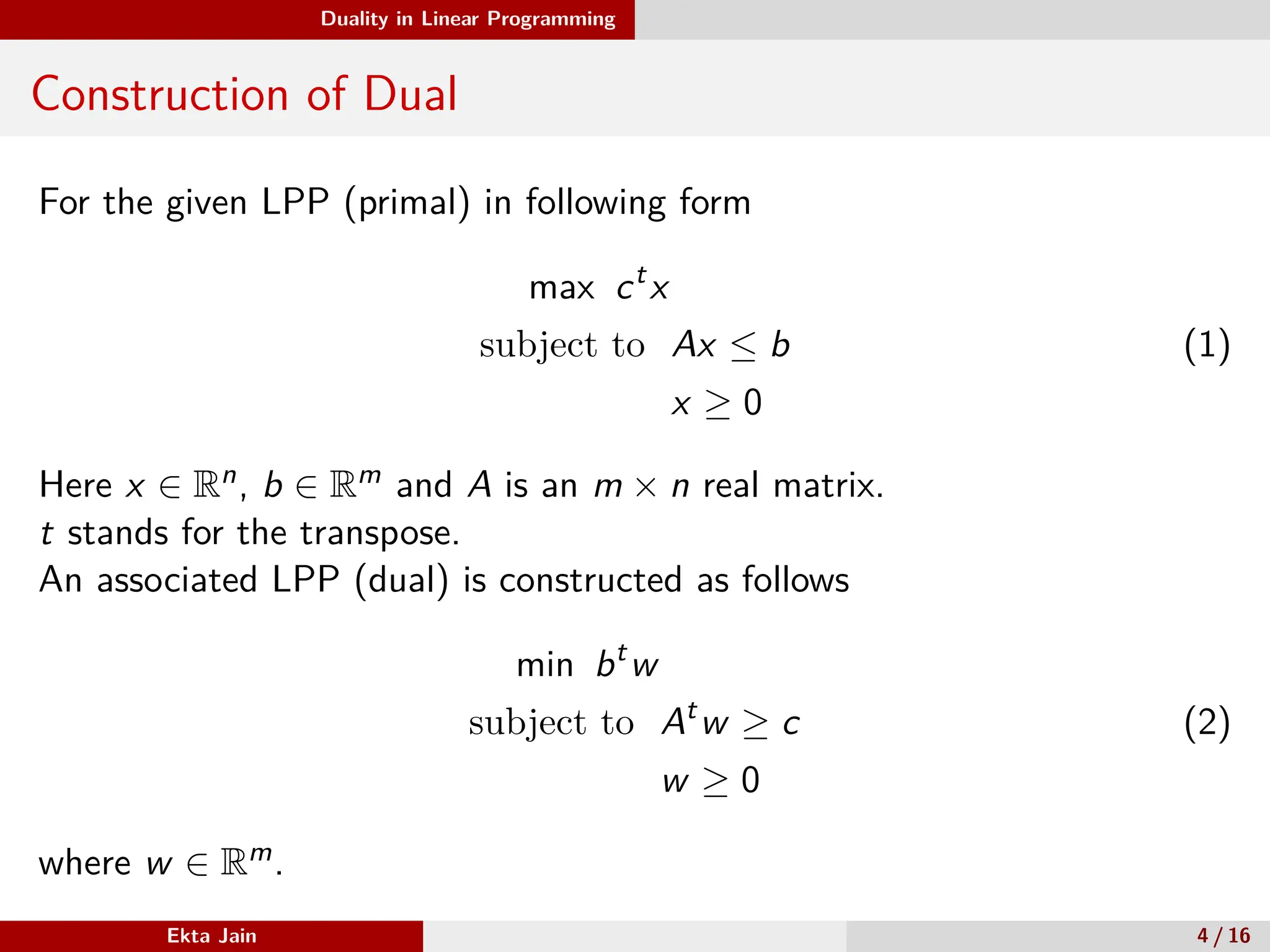
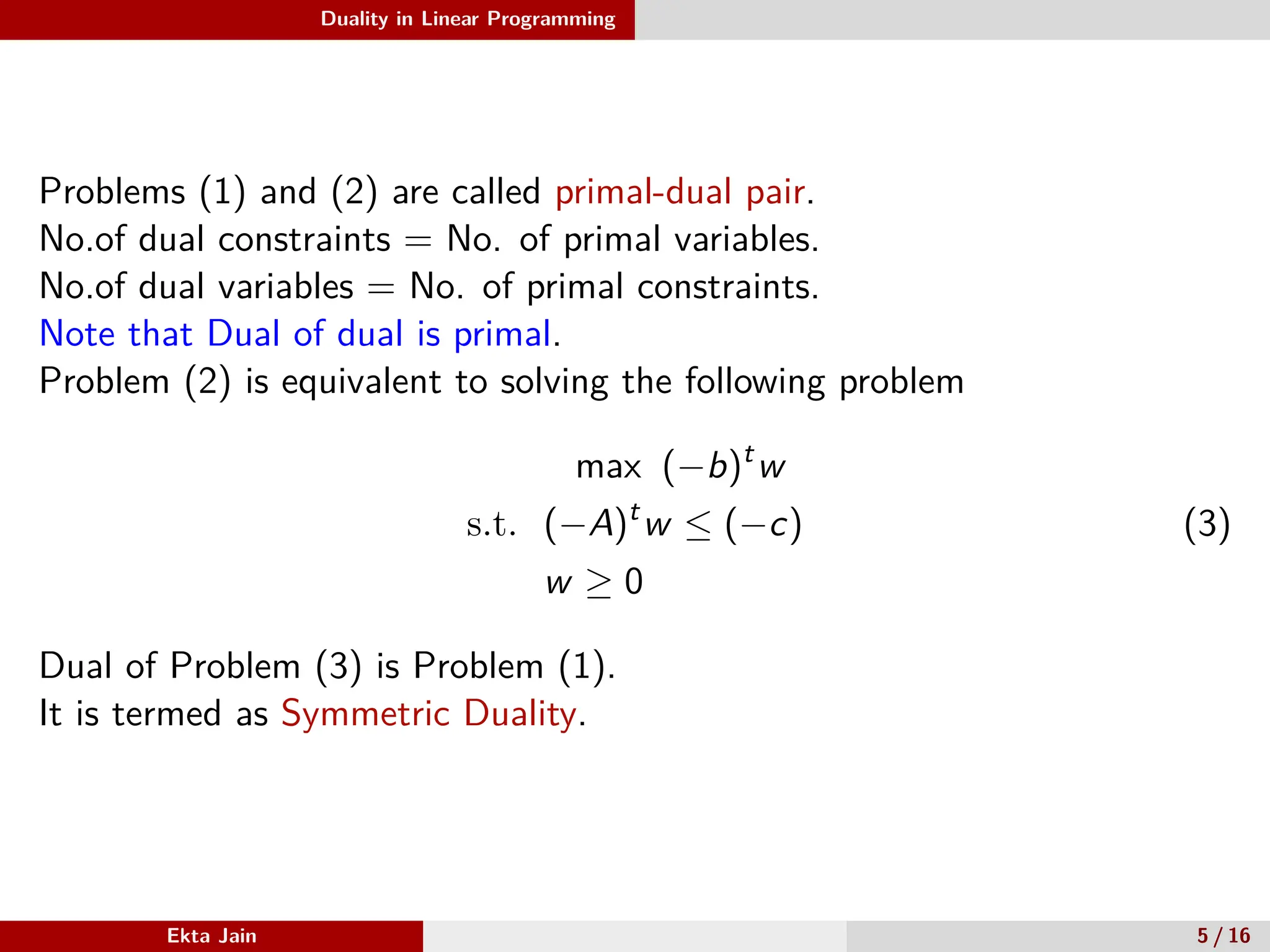
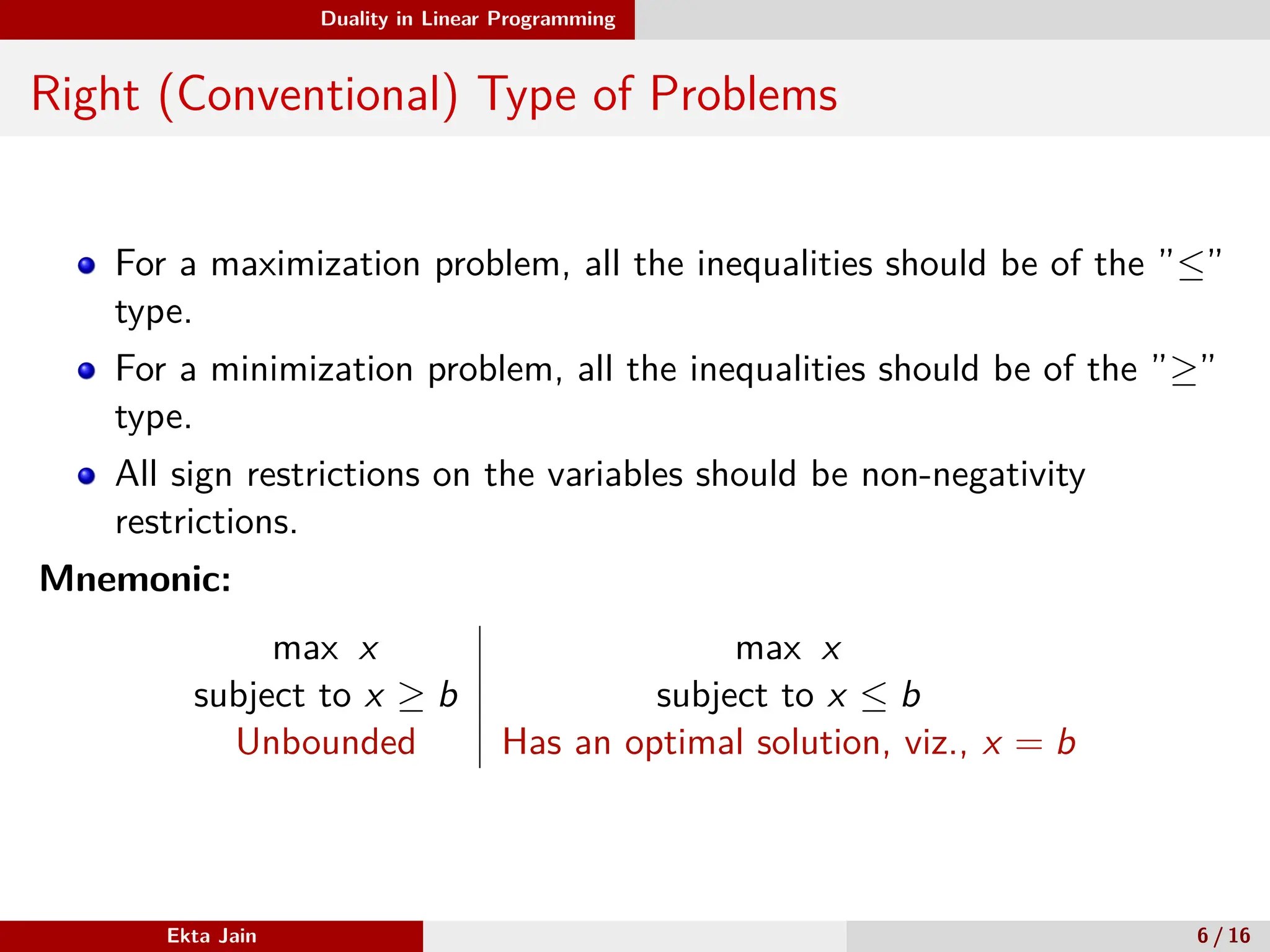
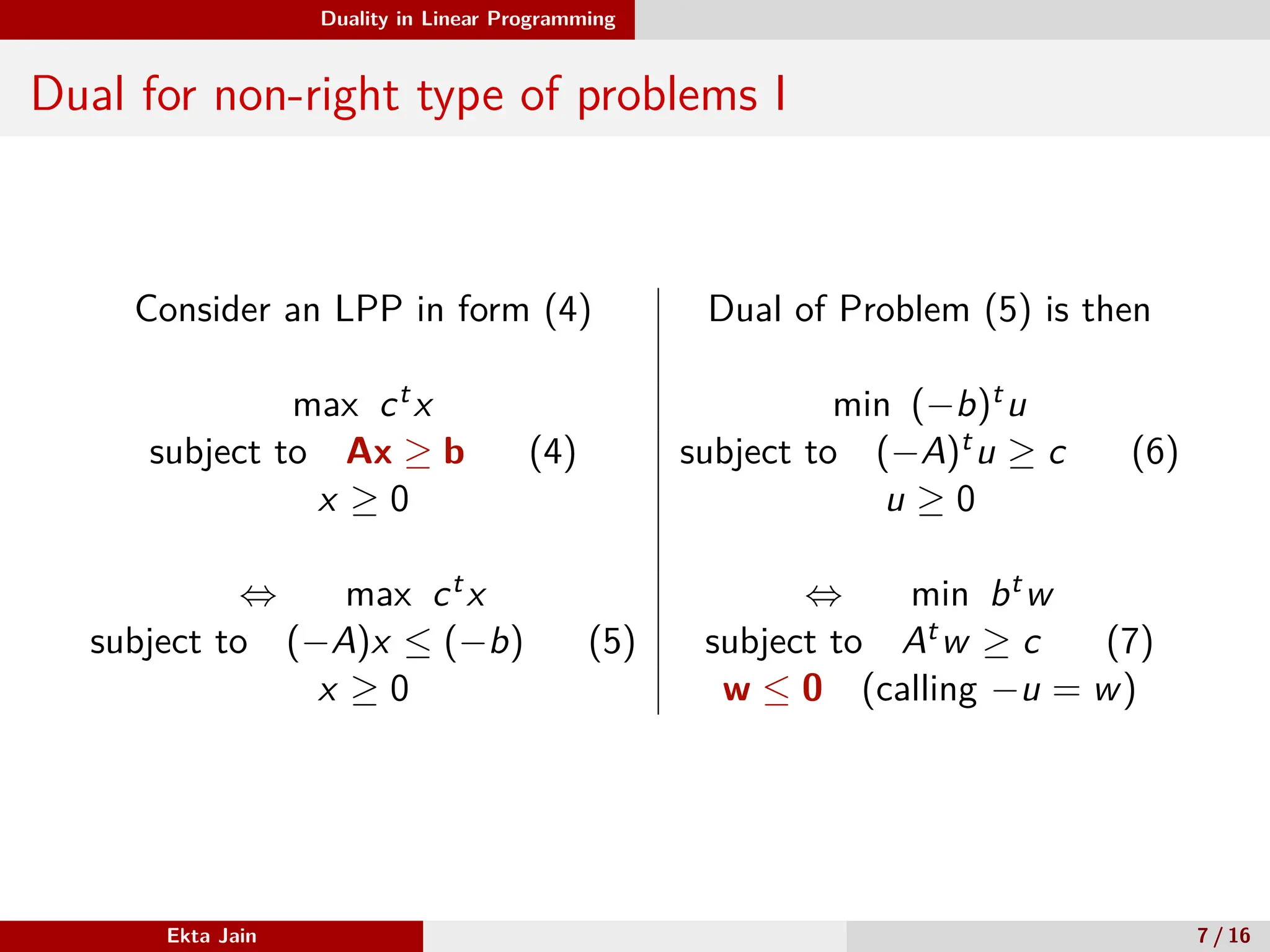
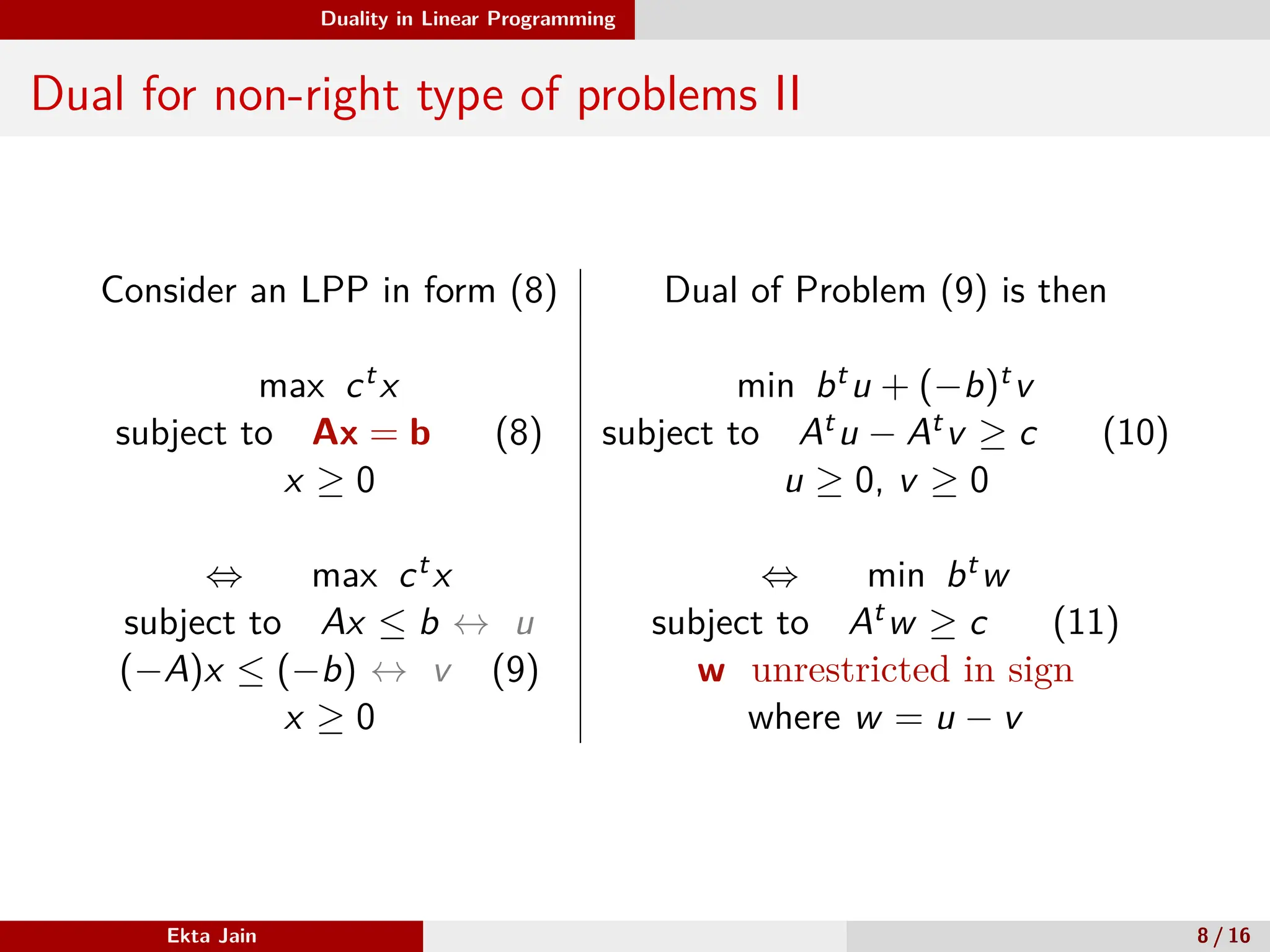
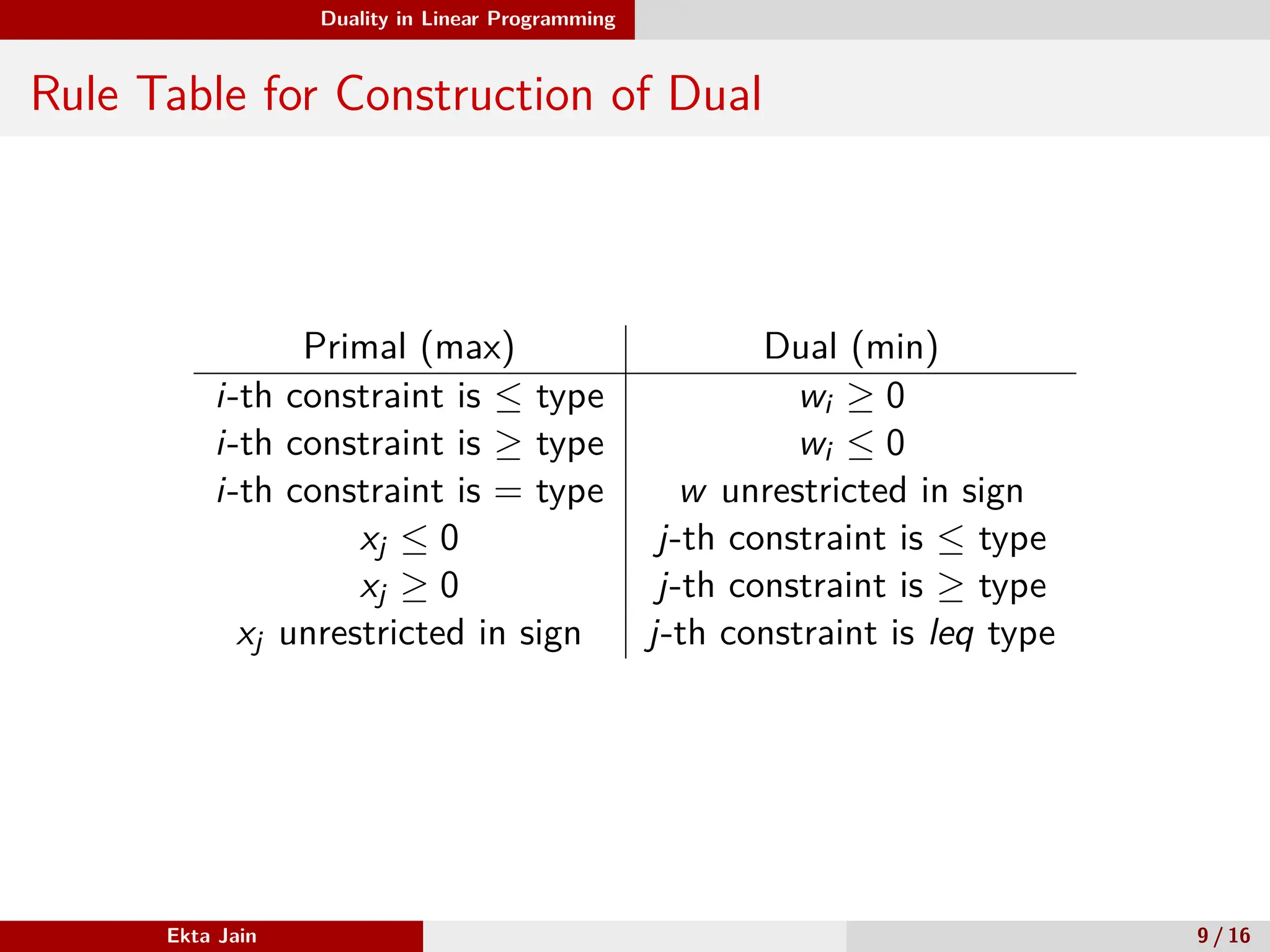
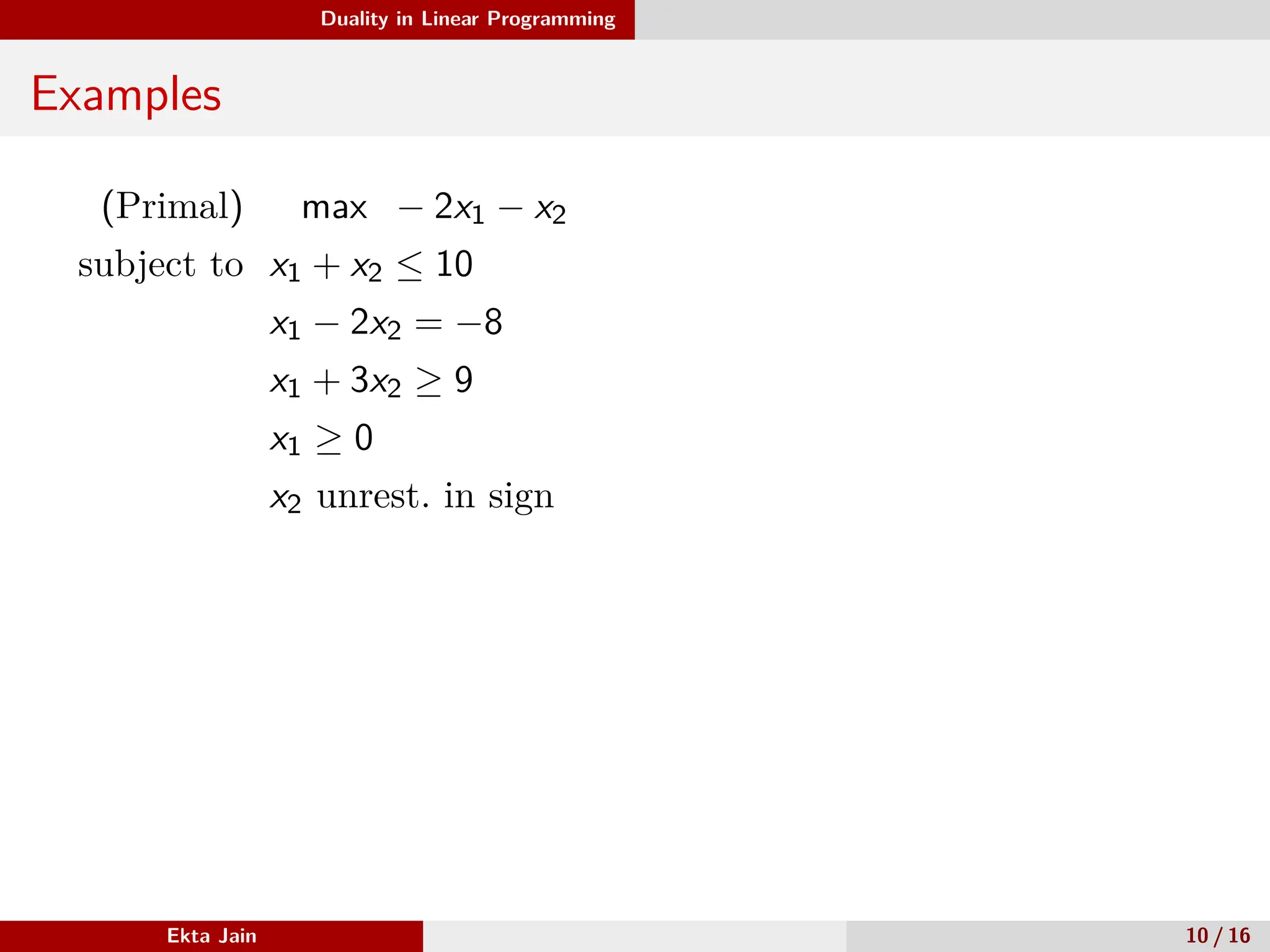
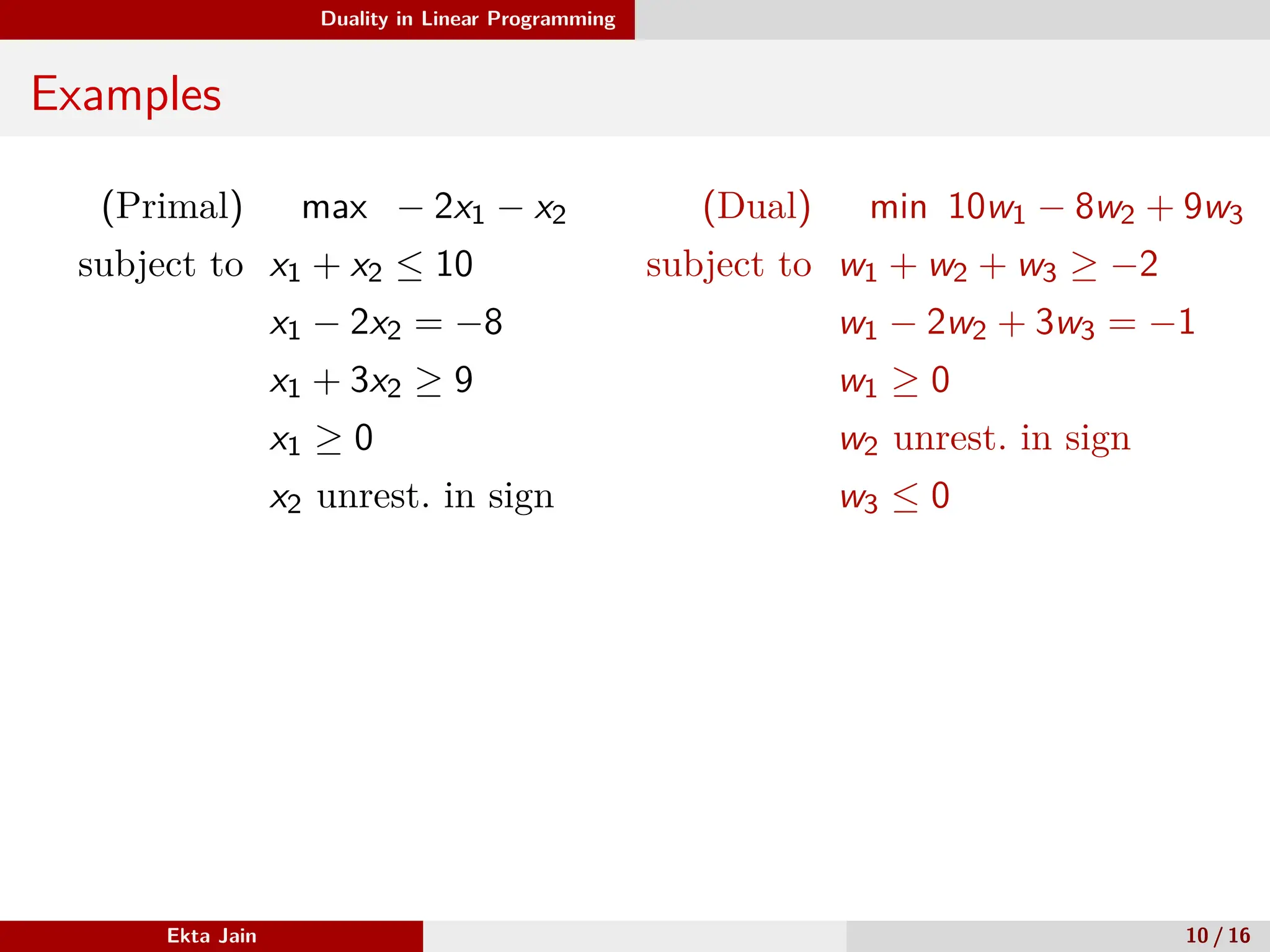
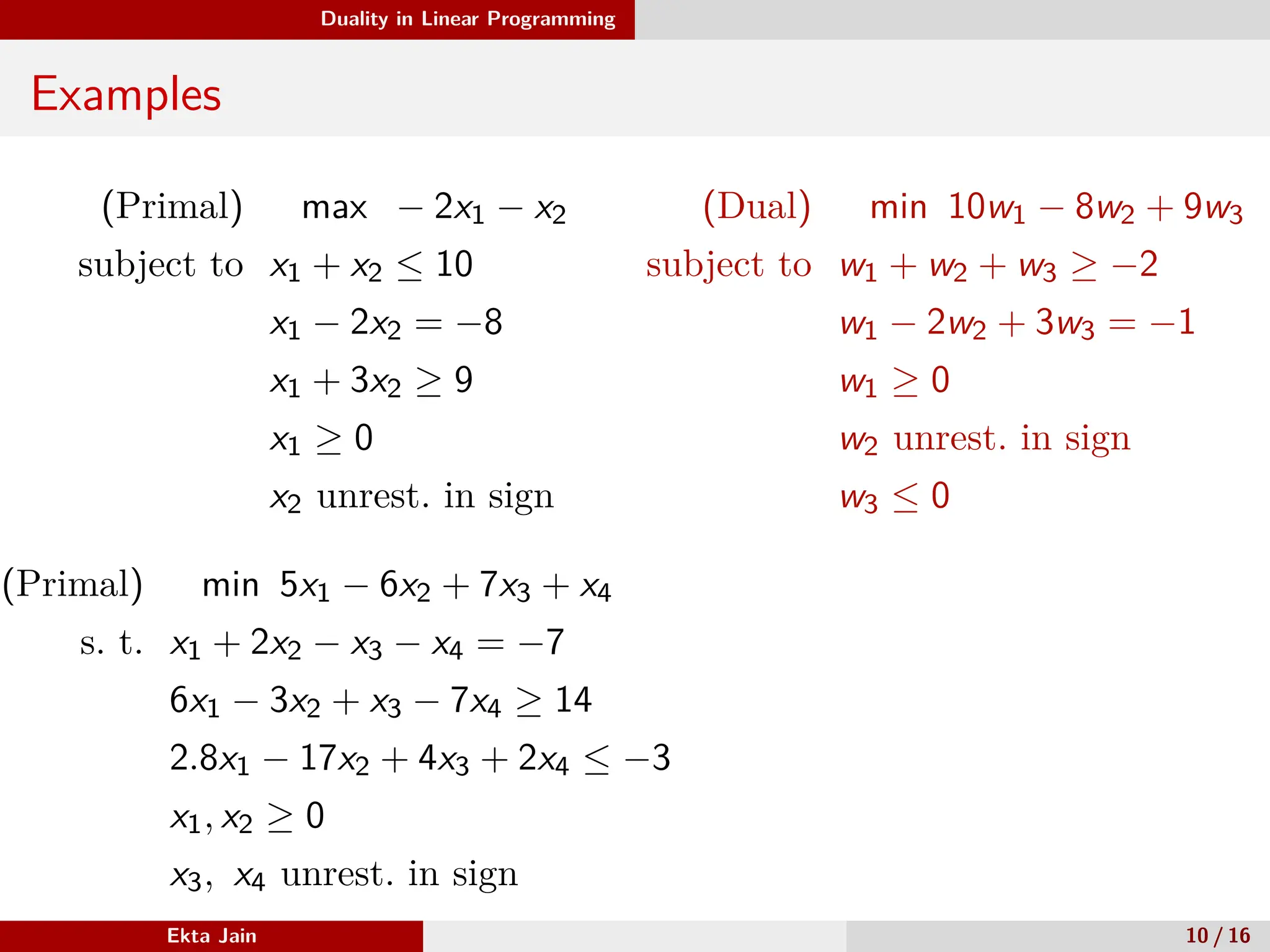
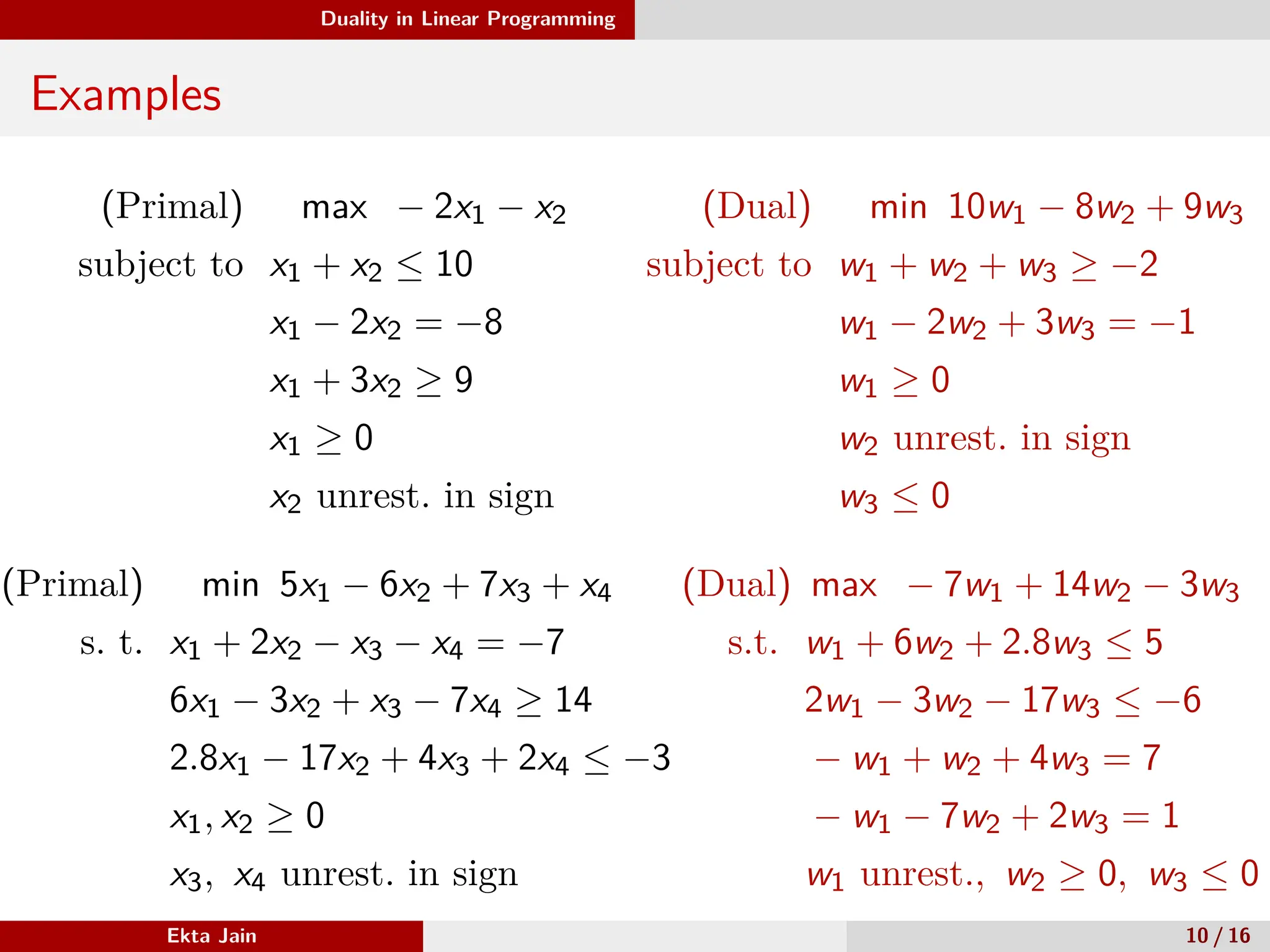
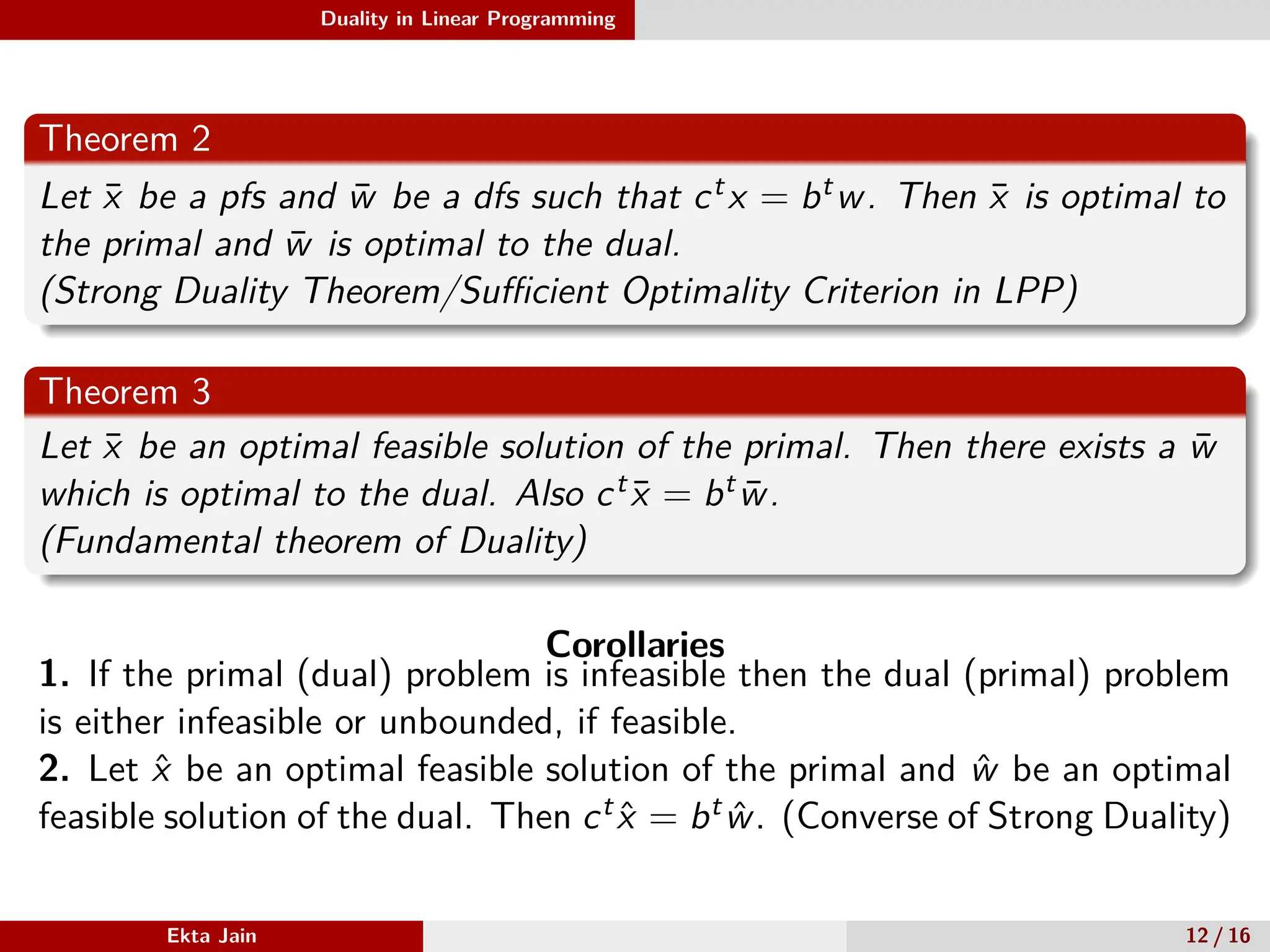
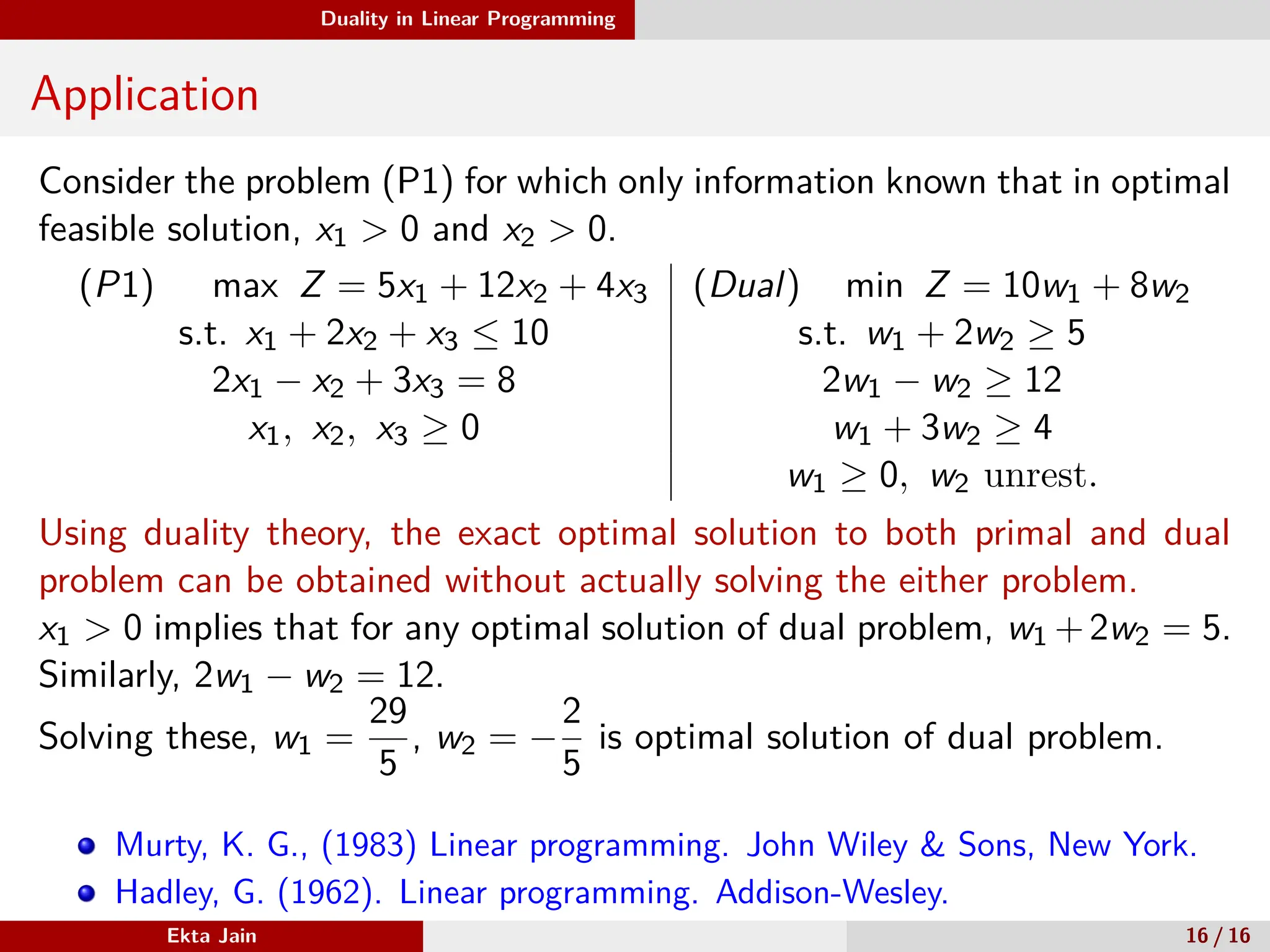
The document discusses duality in linear programming, highlighting the relationship between primal and dual problems, and presents multiple examples demonstrating the construction of duals from primal problems. It explains key theorems such as weak and strong duality, as well as the conditions under which optimal solutions exist. Additionally, it outlines the significance of duality in obtaining optimal solutions without directly solving primal or dual problems.