Downloaded 1,047 times


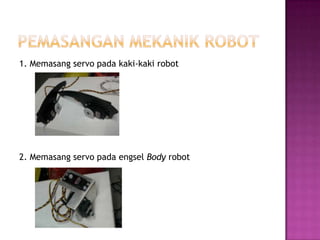
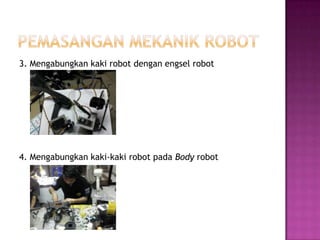
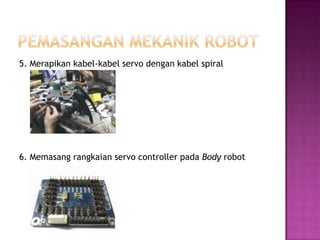
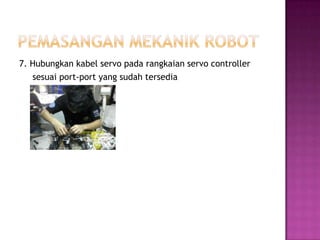



Ringkasan dokumen ini membahas tentang pemasangan mekanik pada robot hexapod. Dokumen ini menjelaskan bahwa robot hexapod menggunakan 6 kaki yang dipasang servo motor untuk membuat robot dapat berjalan. Dokumen ini juga menjelaskan tahapan-tahapan pemasangan mekanik robot hexapod mulai dari memasang servo pada kaki, engsel body, hingga menghubungkan semua komponen.




































































![Modul Ajar KBC SKI Kelas 3 MI [MODULKELAS.COM]](https://cdn.slidesharecdn.com/ss_thumbnails/modulajarkbcskikelas3mimodulkelas-260130161838-4934e483-thumbnail.jpg?width=640&height=640&fit=bounds)









