Download to read offline

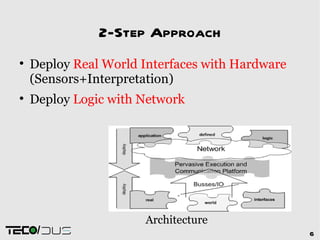
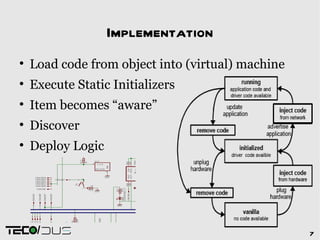
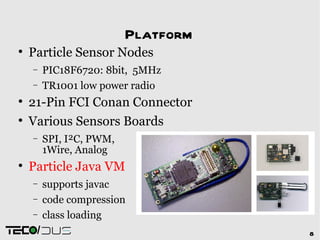
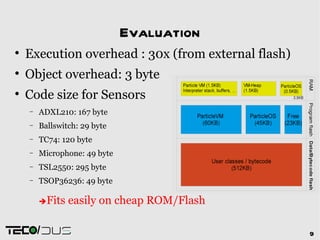

This document proposes pluggable real world interfaces that allow objects to have embedded software and sensors. It describes a two-step approach where real world interfaces with hardware are first deployed to objects, giving them awareness of their context, and then logic can be deployed through a network. This would allow objects like chairs to have code stored in them to recognize their state and interact in an office environment. The implementation uses small sensor nodes and a Java virtual machine to execute code on the objects. An evaluation shows the overhead is small and sensors can easily fit on low-cost memory. The conclusion is that context-awareness can be achieved by storing code in physical objects, and embedded systems can benefit from virtual machine abstraction.
























































