Download as PDF, PPTX

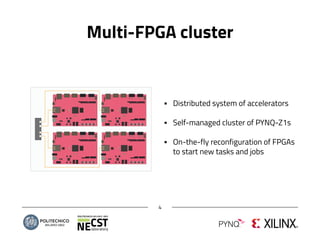
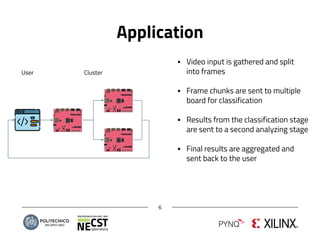
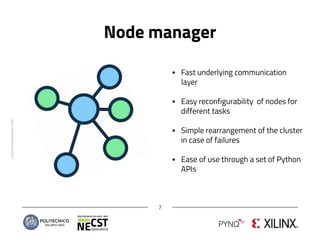


The document presents a project on abandoned object detection using a pynq-based multi-FPGA cluster that enhances computational power and reliability. It utilizes an accelerated YOLO detector, with a C++ node manager for efficient communication and user-friendly Python libraries for application development. The system is designed for effective frame processing and result aggregation, demonstrating fast data transfer capabilities and ease of reconfiguration.