Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Katsuhiro Morishita
PDF, PPTX
639 views
海洋調査用ブイの水深制御のためのPID制御パラメータの求め方
海洋調査で使われるブイの水深制御用PID制御のパラメータを求める方法とプログラムについて説明しました。追加の説明が欲しい場合はコメントをお願いします。笑
Engineering
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 18
2
/ 18
3
/ 18
4
/ 18
5
/ 18
6
/ 18
7
/ 18
8
/ 18
9
/ 18
10
/ 18
11
/ 18
12
/ 18
13
/ 18
14
/ 18
15
/ 18
16
/ 18
17
/ 18
18
/ 18
More Related Content
PPTX
Python開発環境構築ハンズオンセミナー
by
地球人
PPTX
Telegram marketing
by
Виктор Каргин
PDF
Aki
by
Tsegaye Melaku
PDF
Heterogenität in Bewegung
by
Fabian Mundt
PPTX
Learning, communication and teachers using technology in ELT
by
Yamith José Fandiño Parra
PDF
felino_2016AW型錄
by
julia chuang
PPTX
11
by
Seok-Jae Hong
PPTX
12
by
Seok-Jae Hong
Python開発環境構築ハンズオンセミナー
by
地球人
Telegram marketing
by
Виктор Каргин
Aki
by
Tsegaye Melaku
Heterogenität in Bewegung
by
Fabian Mundt
Learning, communication and teachers using technology in ELT
by
Yamith José Fandiño Parra
felino_2016AW型錄
by
julia chuang
11
by
Seok-Jae Hong
12
by
Seok-Jae Hong
Viewers also liked
PPTX
10
by
Seok-Jae Hong
PPTX
lower limb 9
by
Seok-Jae Hong
PPTX
Juran’s Trilogy
by
Jeanie Arnoco
PPTX
20160923 expocición sobre organigramas
by
Elvis U Omar
PPTX
Electric motor
by
Masud Rana
PPTX
Dc motor
by
Masud Rana
PPTX
Deming’s 14 Points for Management
by
Jeanie Arnoco
DOCX
Guzik response paper ii
by
Kyle Guzik
PDF
情報セキュリティCAS 第七十一回放送用スライド
by
Kumasan, LLC.
PDF
Selected_Architectural_Designs_2016
by
Architectural_Institute_of_Japan
PPTX
Hul
by
palani samy
PDF
Corporate Presentation March 2017
by
Western Areas Ltd
10
by
Seok-Jae Hong
lower limb 9
by
Seok-Jae Hong
Juran’s Trilogy
by
Jeanie Arnoco
20160923 expocición sobre organigramas
by
Elvis U Omar
Electric motor
by
Masud Rana
Dc motor
by
Masud Rana
Deming’s 14 Points for Management
by
Jeanie Arnoco
Guzik response paper ii
by
Kyle Guzik
情報セキュリティCAS 第七十一回放送用スライド
by
Kumasan, LLC.
Selected_Architectural_Designs_2016
by
Architectural_Institute_of_Japan
Hul
by
palani samy
Corporate Presentation March 2017
by
Western Areas Ltd
More from Katsuhiro Morishita
PDF
数ページの卒業論文作成のためのwordの使い方
by
Katsuhiro Morishita
PDF
Pythonのパッケージ管理ツールの話@2020
by
Katsuhiro Morishita
PDF
オトナのpandas勉強会(資料)
by
Katsuhiro Morishita
PDF
SIgfox触ってみた in IoTLT in 熊本市 vol.3
by
Katsuhiro Morishita
PDF
Google Colaboratoryの使い方
by
Katsuhiro Morishita
PDF
Excelでのグラフの作成方法re
by
Katsuhiro Morishita
PDF
Pythonのmain関数
by
Katsuhiro Morishita
PDF
Pythonスクリプトの実行方法@2018
by
Katsuhiro Morishita
PDF
機械学習と主成分分析
by
Katsuhiro Morishita
PDF
Pythonで始めた数値計算の授業@わんくま勉強会2018-04
by
Katsuhiro Morishita
PDF
マークシート読み込みプログラムを作ってみた@2018-04-04
by
Katsuhiro Morishita
PDF
オトナの画像認識 2018年3月21日実施
by
Katsuhiro Morishita
PDF
LoRa-WANで河川水位を計測してみた@IoTLT@熊本市 vol.001
by
Katsuhiro Morishita
PDF
シリーズML-08 ニューラルネットワークを用いた識別・分類ーシングルラベルー
by
Katsuhiro Morishita
PDF
シリーズML-07 ニューラルネットワークによる非線形回帰
by
Katsuhiro Morishita
PDF
シリーズML-06 ニューラルネットワークによる線形回帰
by
Katsuhiro Morishita
PDF
シリーズML-05 ニューラルネットワーク
by
Katsuhiro Morishita
PDF
シリーズML-03 ランダムフォレストによる自動識別
by
Katsuhiro Morishita
PDF
シリーズML-01 機械学習の概要
by
Katsuhiro Morishita
PDF
Pandas利用上のエラーとその対策
by
Katsuhiro Morishita
数ページの卒業論文作成のためのwordの使い方
by
Katsuhiro Morishita
Pythonのパッケージ管理ツールの話@2020
by
Katsuhiro Morishita
オトナのpandas勉強会(資料)
by
Katsuhiro Morishita
SIgfox触ってみた in IoTLT in 熊本市 vol.3
by
Katsuhiro Morishita
Google Colaboratoryの使い方
by
Katsuhiro Morishita
Excelでのグラフの作成方法re
by
Katsuhiro Morishita
Pythonのmain関数
by
Katsuhiro Morishita
Pythonスクリプトの実行方法@2018
by
Katsuhiro Morishita
機械学習と主成分分析
by
Katsuhiro Morishita
Pythonで始めた数値計算の授業@わんくま勉強会2018-04
by
Katsuhiro Morishita
マークシート読み込みプログラムを作ってみた@2018-04-04
by
Katsuhiro Morishita
オトナの画像認識 2018年3月21日実施
by
Katsuhiro Morishita
LoRa-WANで河川水位を計測してみた@IoTLT@熊本市 vol.001
by
Katsuhiro Morishita
シリーズML-08 ニューラルネットワークを用いた識別・分類ーシングルラベルー
by
Katsuhiro Morishita
シリーズML-07 ニューラルネットワークによる非線形回帰
by
Katsuhiro Morishita
シリーズML-06 ニューラルネットワークによる線形回帰
by
Katsuhiro Morishita
シリーズML-05 ニューラルネットワーク
by
Katsuhiro Morishita
シリーズML-03 ランダムフォレストによる自動識別
by
Katsuhiro Morishita
シリーズML-01 機械学習の概要
by
Katsuhiro Morishita
Pandas利用上のエラーとその対策
by
Katsuhiro Morishita
海洋調査用ブイの水深制御のためのPID制御パラメータの求め方
1.
海洋調査用ブイの水深制御 のためのPID制御 パラメータの求め方 Katsuhiro MORISHITA Created: 2014-02-01 Uudate:
2017-03-16 1
2.
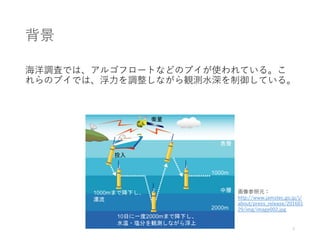
背景 海洋調査では、アルゴフロートなどのブイが使われている。こ れらのブイでは、浮力を調整しながら観測水深を制御している。 画像参照元: http://www.jamstec.go.jp/j/ about/press_release/201601 29/img/image002.jpg 2
3.
目的 定水深制御にPID制御を利用し、その制御パラメータを求めるプ ログラムを作成する。 3
4.
作成したプログラムpd.py PIDの内、PDのパラメータを求めるPythonスクリプトを作成し た。下記よりダウンロードできる。 Download: https://github.com/KatsuhiroMorishita/buoy/blob/master/pd.py 4
5.
プログラムの仮定 • 重力加速度 • 9.80[m/s2] •
ブイの質量 • 20.0 [kg] • 鉛直下向きを正 • 体積変化量の範囲 • 0.00024~-0.00016 [m3] • 周囲流体の密度 • 1035 [kg/m3] • 水深によって水の密度を変えない • 計算時間ステップ • 0.01 [s] • 最大移動速度(目安) • 0.5 [m/s] • 制御量の飽和をさせない • 別にしてもいいはずなので、緩和してもいい かも • 中性浮力から計算をスタート • ブイの初速は0.0[m/s] • ブイ周囲の流体は上下に移動しない • ブイ周囲の流体から浮力以外の力を受けない • 減衰項を無視 5 モータによる体積変化機 構により浮力を変化させ る構造を前提とする。 真空(体積が変わる) ピストン (上下に移動する) シリンダ
6.
実行上の注意事項 • 大量のファイルが作成されます • 設定によっては数Gbyteを超えるかもしれません 6
7.
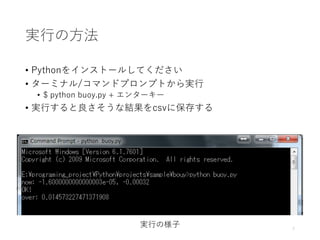
実行の方法 • Pythonをインストールしてください • ターミナル/コマンドプロンプトから実行 •
$ python pd.py + エンターキー • 実行すると良さそうな結果をcsvに保存する 7 実行の様子
8.
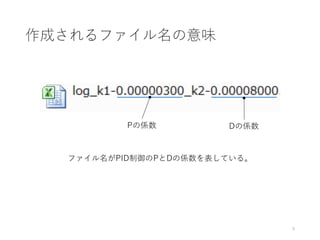
作成されるファイル名の意味 ファイル名がPID制御のPとDの係数を表している。 8 Pの係数 Dの係数
9.
計算結果の見方 9 時間[s] 深さ[m] ブイの加 速度 [m/s2] ブイの移 動速度 [m/s] 体積変化 量[m3] 浮力[N]
10.
計算結果例 0 5 10 15 0 100 200
300 400 500 600 深度[m] 経過時間[s] "k1=-0.00000160, k2=-0.000068" "k1=-0.00000300, k2=-0.000080" オーバーシュート 10
11.
パラメータの選択方法 例えば、以下の指標を基に選択すれば良い • 目標深度までの時定数 • オーバーシュート量 11
12.
課題 ブイ周囲の流体の湧昇/下降流の影響の大きさによっては、ブイ が永遠に目標深度に達さないこともあり得る。 • 対策としては、PIDのIの制御を入れることが考えられる • また、デフォルトでは周囲の流体速度は0とし、かつ流体との 相対速度による抗力を無視しているので、いくつか修正が必要 •
なお、周囲の流体速度が大きい場合、現在仮定している最大移 動速度0.5[m/s]では対応できないかもしれない 12
13.
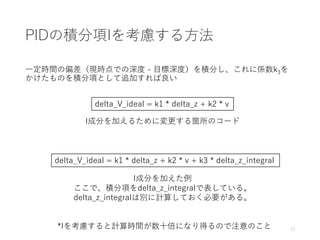
PIDの積分項Iを考慮する方法 一定時間の偏差(現時点での深度 - 目標深度)を積分し、これに係数k3を かけたものを積分項として追加すれば良い 13*Iを考慮すると計算時間が数十倍になり得るので注意のこと delta_V_ideal
= k1 * delta_z + k2 * v I成分を加えるために変更する箇所のコード delta_V_ideal = k1 * delta_z + k2 * v + k3 * delta_z_integral I成分を加えた例 ここで、積分項をdelta_z_integralで表している。 delta_z_integralは別に計算しておく必要がある。
14.
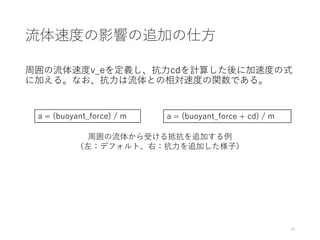
流体速度の影響の追加の仕方 周囲の流体速度v_eを定義し、抗力cdを計算した後に加速度の式 に加える。なお、抗力は流体との相対速度の関数である。 14 周囲の流体から受ける抵抗を追加する例 (左:デフォルト、右:抗力を追加した様子) a = (buoyant_force)
/ m a = (buoyant_force + cd) / m
15.
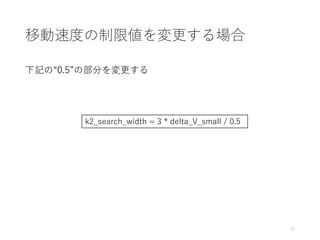
移動速度の制限値を変更する場合 下記の“0.5”の部分を変更する 15 k2_search_width = 3
* delta_V_small / 0.5
16.
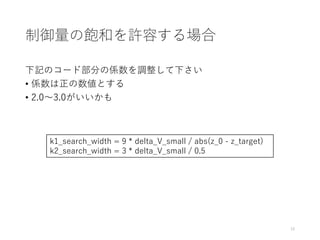
制御量の飽和を許容する場合 下記のコード部分の係数を調整して下さい • 係数は正の数値とする • 2.0~3.0がいいかも 16 k1_search_width
= 9 * delta_V_small / abs(z_0 - z_target) k2_search_width = 3 * delta_V_small / 0.5
17.
その他 座標の計算を行うときに利用する移動速度vと体積変化量の計算 に利用するvを分けて、後者のvに観測値としての誤差を含めて 応答を調べてもいいのかもしれません 17
18.
周囲の状況に合わせて動的にパラメータ を変更するなら・・・ • カルマンフィルタを利用 • 難易度は高い •
MATLABの利用を推奨 • 実装の際は、センサーのヘルス状態の判定も必要になる 18
Download
![プログラムの仮定
• 重力加速度
• 9.80[m/s2]
• ブイの質量
• 20.0 [kg]
• 鉛直下向きを正
• 体積変化量の範囲
• 0.00024~-0.00016 [m3]
• 周囲流体の密度
• 1035 [kg/m3]
• 水深によって水の密度を変えない
• 計算時間ステップ
• 0.01 [s]
• 最大移動速度(目安)
• 0.5 [m/s]
• 制御量の飽和をさせない
• 別にしてもいいはずなので、緩和してもいい
かも
• 中性浮力から計算をスタート
• ブイの初速は0.0[m/s]
• ブイ周囲の流体は上下に移動しない
• ブイ周囲の流体から浮力以外の力を受けない
• 減衰項を無視 5
モータによる体積変化機
構により浮力を変化させ
る構造を前提とする。
真空(体積が変わる)
ピストン
(上下に移動する)
シリンダ](https://image.slidesharecdn.com/pid-170316082133/85/PID-5-320.jpg)
![計算結果の見方
9
時間[s] 深さ[m]
ブイの加
速度
[m/s2]
ブイの移
動速度
[m/s]
体積変化
量[m3]
浮力[N]](https://image.slidesharecdn.com/pid-170316082133/85/PID-9-320.jpg)
![計算結果例
0
5
10
15
0 100 200 300 400 500 600
深度[m]
経過時間[s]
"k1=-0.00000160, k2=-0.000068"
"k1=-0.00000300, k2=-0.000080"
オーバーシュート
10](https://image.slidesharecdn.com/pid-170316082133/85/PID-10-320.jpg)
![課題
ブイ周囲の流体の湧昇/下降流の影響の大きさによっては、ブイ
が永遠に目標深度に達さないこともあり得る。
• 対策としては、PIDのIの制御を入れることが考えられる
• また、デフォルトでは周囲の流体速度は0とし、かつ流体との
相対速度による抗力を無視しているので、いくつか修正が必要
• なお、周囲の流体速度が大きい場合、現在仮定している最大移
動速度0.5[m/s]では対応できないかもしれない
12](https://image.slidesharecdn.com/pid-170316082133/85/PID-12-320.jpg)