Recommended
PDF
PDF
NIPS KANSAI Reading Group #7: 逆強化学習の行動解析への応用
PPTX
PPTX
PPTX
PDF
PPTX
Generative Adversarial Imitation Learningの紹介(RLアーキテクチャ勉強会)
PDF
Decision Transformer: Reinforcement Learning via Sequence Modeling
PDF
PPTX
[DL輪読会]Meta-Learning Probabilistic Inference for Prediction
PPTX
[DL輪読会]Learning Latent Dynamics for Planning from Pixels
PPTX
強化学習の基礎と深層強化学習(東京大学 松尾研究室 深層強化学習サマースクール講義資料)
PPTX
[DL輪読会]Learning to Adapt: Meta-Learning for Model-Based Control
PPTX
Maximum Entropy IRL(最大エントロピー逆強化学習)とその発展系について
PPTX
PPTX
強化学習エージェントの内発的動機付けによる探索とその応用(第4回 統計・機械学習若手シンポジウム 招待公演)
PDF
[DL輪読会]Decision Transformer: Reinforcement Learning via Sequence Modeling
PDF
[DL輪読会]Deep Learning 第5章 機械学習の基礎
PPTX
[DL輪読会]SOLAR: Deep Structured Representations for Model-Based Reinforcement L...
PPTX
[DL輪読会]Dream to Control: Learning Behaviors by Latent Imagination
PDF
Interspeech 2020 読み会 "Incremental Text to Speech for Neural Sequence-to-Sequ...
PDF
分散型強化学習手法の最近の動向と分散計算フレームワークRayによる実装の試み
PDF
PDF
PDF
[DL輪読会]Learning to Act by Predicting the Future
PPTX
PPTX
最新の多様な深層強化学習モデルとその応用(第40回強化学習アーキテクチャ講演資料)
PDF
【文献紹介】Multi-modal Summarization for Asynchronous Collection of Text, Image, A...
PDF
Computational Motor Control: Reinforcement Learning (JAIST summer course)
PPTX
【DL輪読会】Is Conditional Generative Modeling All You Need For Decision-Making?
More Related Content
PDF
PDF
NIPS KANSAI Reading Group #7: 逆強化学習の行動解析への応用
PPTX
PPTX
PPTX
PDF
PPTX
Generative Adversarial Imitation Learningの紹介(RLアーキテクチャ勉強会)
PDF
Decision Transformer: Reinforcement Learning via Sequence Modeling
What's hot
PDF
PPTX
[DL輪読会]Meta-Learning Probabilistic Inference for Prediction
PPTX
[DL輪読会]Learning Latent Dynamics for Planning from Pixels
PPTX
強化学習の基礎と深層強化学習(東京大学 松尾研究室 深層強化学習サマースクール講義資料)
PPTX
[DL輪読会]Learning to Adapt: Meta-Learning for Model-Based Control
PPTX
Maximum Entropy IRL(最大エントロピー逆強化学習)とその発展系について
PPTX
PPTX
強化学習エージェントの内発的動機付けによる探索とその応用(第4回 統計・機械学習若手シンポジウム 招待公演)
PDF
[DL輪読会]Decision Transformer: Reinforcement Learning via Sequence Modeling
PDF
[DL輪読会]Deep Learning 第5章 機械学習の基礎
PPTX
[DL輪読会]SOLAR: Deep Structured Representations for Model-Based Reinforcement L...
PPTX
[DL輪読会]Dream to Control: Learning Behaviors by Latent Imagination
PDF
Interspeech 2020 読み会 "Incremental Text to Speech for Neural Sequence-to-Sequ...
PDF
分散型強化学習手法の最近の動向と分散計算フレームワークRayによる実装の試み
PDF
PDF
PDF
[DL輪読会]Learning to Act by Predicting the Future
PPTX
PPTX
最新の多様な深層強化学習モデルとその応用(第40回強化学習アーキテクチャ講演資料)
PDF
【文献紹介】Multi-modal Summarization for Asynchronous Collection of Text, Image, A...
Similar to NIPS KANSAI Reading Group #7: Temporal Difference Models: Model-Free Deep RL for Model-based Control
PDF
Computational Motor Control: Reinforcement Learning (JAIST summer course)
PPTX
【DL輪読会】Is Conditional Generative Modeling All You Need For Decision-Making?
PDF
ディープラーニング入門 ~ 画像処理・自然言語処理について ~
PPTX
PDF
SSII2021 [TS2] 深層強化学習 〜 強化学習の基礎から応用まで 〜
PDF
[Dl輪読会]introduction of reinforcement learning
PDF
PDF
PDF
PPTX
[DL輪読会]Temporal DifferenceVariationalAuto-Encoder
PDF
Learning to Navigate in Complex Environments 輪読
PPTX
【輪読会】Braxlines: Fast and Interactive Toolkit for RL-driven Behavior Engineeri...
PDF
Tech-Circle #18 Pythonではじめる強化学習 OpenAI Gym 体験ハンズオン
PDF
東大大学院 電子情報学特論講義資料「深層学習概論と理論解析の課題」大野健太
PDF
PDF
TensorflowとKerasによる深層学習のプログラム実装実践講座
PDF
PDF
時系列予測モデルを導入した価値関数に基づく強化学習
PDF
PPTX
NIPS KANSAI Reading Group #7: Temporal Difference Models: Model-Free Deep RL for Model-based Control 1. Temporal Difference Models: Model-Free
Deep RL for Model-Based Control
V. Pong*, S. Gu*, M. Dalal, and S. Levine
ICLR 2018
Eiji Uchibe
Dept. of Brain Robot Interface, ATR Computational Neuroscience Labs.
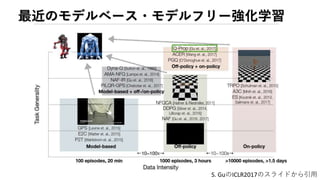
2. 3. モデルベース強化学習
• 狭義には状態遷移確率𝑃(𝑠′ ∣ 𝑠, 𝑎)が既知、もしくは推定した
モデルを用いた強化学習アルゴリズム
– 価値反復法や方策反復法、
PILCO [Deisenroth et al., 2014], MCTSなど
環境𝑃 𝑠′ 𝑠, 𝑎
観測𝑜
行動𝑎
報酬𝑟内部状態𝑠
学習率 𝛼
逆温度 𝛽
割引率 𝛾
4. 5. 𝑠 𝑔
目標条件付き価値関数 (Goal-conditioned value function)
• 価値関数を目標状態𝑠 𝑔 ∈ 𝒢にも依存するように拡張
マルチタスク強化学習
• 基本的には通常の状態行動価値関数を
と拡張するだけ
• タスクを失敗しても𝑠 𝑔を失敗した軌道の中から選び直すことで
非零の報酬を生成し学習する [Andrychowicz et al., 2017]
𝑄(𝑠, 𝑎, 𝑠 𝑔)
𝑠𝑡
𝑎 𝑡
𝑠𝑡+1
𝑠 𝑔
𝑠 𝑔
6. モデル予測制御 (Model Predictive Control)
• 状態のダイナミクスは既知
• モデルベース強化学習とみなせる
• 目的
制約条件
• 各時間で制約付き最適化問題
を解くので、計算コストは高い
𝑎 𝑡 = argmax
𝑎 𝑡:𝑡+𝑇
𝑖=𝑡
𝑡+𝑇
𝑟𝑐(𝑠𝑖, 𝑎𝑖)
𝑠𝑖+1 = 𝑓 𝑠𝑖, 𝑎𝑖 , ∀𝑖 ∈ 𝑡, … , 𝑡 + 𝑇 − 1
[山田2006]から引用
7. 目標条件付き価値関数からモデルへ
• 目標集合𝒢が状態集合𝒮と同じ場合(𝒢 = 𝒮)を考える
• 距離ベース報酬関数を導入する
• 割引率𝛾 = 0のとき価値関数は即時報酬に収束
– 𝐷は距離関数なので、𝑄 𝑠𝑡, 𝑎 𝑡, 𝑠 𝑔 = 0なら𝑠𝑡+1 = 𝑠𝑔を意味する
• モデル予測制御の制約条件を変更
𝑟𝑑 𝑠𝑡, 𝑎 𝑡, 𝑠𝑡+1, 𝑠 𝑔 = −𝐷 𝑠𝑡+1, 𝑠 𝑔
𝑄 𝑠𝑡, 𝑎 𝑡, 𝑠 𝑔 = −𝐷 𝑠𝑡+1, 𝑠 𝑔
𝑎 𝑡 = argmax
𝑎 𝑡:𝑡+𝑇
𝑖=𝑡
𝑡+𝑇
𝑟𝑐(𝑠𝑖, 𝑎𝑖)
𝑠𝑖+1 = 𝑓 𝑠𝑖, 𝑎𝑖 , ∀𝑖 ∈ 𝑡, … , 𝑡 + 𝑇 − 1
𝑎 𝑡 = argmax
𝑎 𝑡:𝑡+𝑇,𝑠 𝑡+1:𝑡+𝑇
𝑖=𝑡
𝑡+𝑇
𝑟𝑐(𝑠𝑖, 𝑎𝑖)
𝑄 𝑠𝑖, 𝑎𝑖, 𝑠𝑖+1 = 0, ∀𝑖 ∈ 𝑡, … , 𝑡 + 𝑇 − 1
この段階では、表現方法が
違うだけで同じことを計算
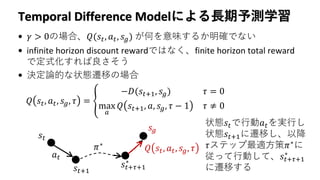
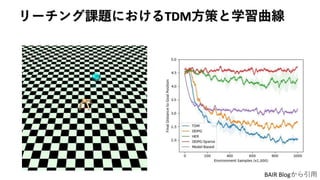
8. Temporal Difference Modelによる長期予測学習
• 𝛾 > 0の場合、𝑄(𝑠𝑡, 𝑎 𝑡, 𝑠 𝑔) が何を意味するか明確でない
• infinite horizon discount rewardではなく、finite horizon total reward
で定式化すれば良さそう
• 決定論的な状態遷移の場合
𝑄 𝑠𝑡, 𝑎 𝑡, 𝑠 𝑔, 𝜏 = ቐ
−𝐷(𝑠𝑡+1, 𝑠 𝑔) 𝜏 = 0
max
𝑎
𝑄 𝑠𝑡+1, 𝑎, 𝑠 𝑔, 𝜏 − 1 𝜏 ≠ 0
𝑠𝑡
𝑎 𝑡
𝑠𝑡+1
𝑠 𝑔
𝑠𝑡+𝜏+1
∗
𝜋∗
𝑄 𝑠𝑡, 𝑎 𝑡, 𝑠 𝑔, 𝜏
状態𝑠𝑡で行動𝑎 𝑡を実行し
状態𝑠𝑡+1に遷移し、以降
𝜏ステップ最適方策𝜋∗
に
従って行動して、𝑠𝑡+𝜏+1
∗
に遷移する
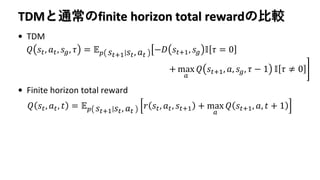
9. TDMと通常のfinite horizon total rewardの比較
• TDM
• Finite horizon total reward
𝑄 𝑠𝑡, 𝑎 𝑡, 𝑠 𝑔, 𝜏 = 𝔼 𝑝 𝑠𝑡+1 𝑠𝑡, 𝑎 𝑡
ൣ−𝐷 𝑠𝑡+1, 𝑠 𝑔 𝕀 𝜏 = 0
+ max
𝑎
𝑄 𝑠𝑡+1, 𝑎, 𝑠 𝑔, 𝜏 − 1 𝕀 𝜏 ≠ 0
𝑄 𝑠𝑡, 𝑎 𝑡, 𝑡 = 𝔼 𝑝 𝑠𝑡+1 𝑠𝑡, 𝑎 𝑡
𝑟 𝑠𝑡, 𝑎 𝑡, 𝑠𝑡+1 + max
𝑎
𝑄 𝑠𝑡+1, 𝑎, 𝑡 + 1
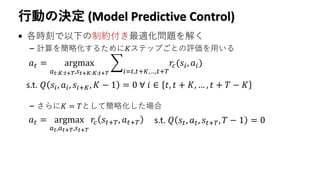
10. 行動の決定 (Model Predictive Control)
• 各時刻で以下の制約付き最適化問題を解く
– 計算を簡略化するために𝐾ステップごとの評価を用いる
– さらに𝐾 = 𝑇として簡略化した場合
𝑎 𝑡 = argmax
𝑎 𝑡:𝐾:𝑡+𝑇,𝑠 𝑡+𝐾:𝐾:𝑡+𝑇
𝑖=𝑡,𝑡+𝐾,…,𝑡+𝑇
𝑟𝑐(𝑠𝑖, 𝑎𝑖)
s.t. 𝑄 𝑠𝑖, 𝑎𝑖, 𝑠𝑖+𝐾, 𝐾 − 1 = 0 ∀ 𝑖 ∈ 𝑡, 𝑡 + 𝐾, … , 𝑡 + 𝑇 − 𝐾
𝑎 𝑡 = argmax
𝑎 𝑡,𝑎 𝑡+𝑇,𝑠 𝑡+𝑇
𝑟𝑐 𝑠𝑡+𝑇, 𝑎 𝑡+𝑇 s.t. 𝑄 𝑠𝑡, 𝑎 𝑡, 𝑠𝑡+𝑇, 𝑇 − 1 = 0
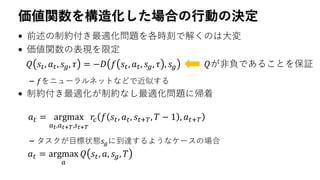
11. 価値関数を構造化した場合の行動の決定
• 前述の制約付き最適化問題を各時刻で解くのは大変
• 価値関数の表現を限定
– 𝑓をニューラルネットなどで近似する
• 制約付き最適化が制約なし最適化問題に帰着
– タスクが目標状態𝑠𝑔に到達するようなケースの場合
𝑄 𝑠𝑡, 𝑎 𝑡, 𝑠 𝑔, 𝜏 = −𝐷 𝑓 𝑠𝑡, 𝑎 𝑡, 𝑠 𝑔, 𝜏 , 𝑠 𝑔 𝑄が非負であることを保証
𝑎 𝑡 = argmax
𝑎 𝑡,𝑎 𝑡+𝑇,𝑠 𝑡+𝑇
𝑟𝑐 𝑓 𝑠𝑡, 𝑎 𝑡, 𝑠𝑡+𝑇, 𝑇 − 1 , 𝑎 𝑡+𝑇
𝑎 𝑡 = argmax
𝑎
𝑄 𝑠𝑡, 𝑎, 𝑠 𝑔, 𝑇
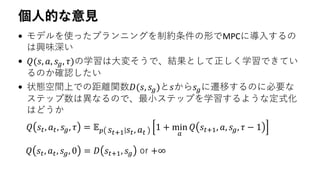
13. 14. 16. 17. 個人的な意見
• モデルを使ったプランニングを制約条件の形でMPCに導入するの
は興味深い
• 𝑄(𝑠, 𝑎, 𝑠 𝑔, 𝜏)の学習は大変そうで、結果として正しく学習できてい
るのか確認したい
• 状態空間上での距離関数𝐷(𝑠, 𝑠 𝑔)と𝑠から𝑠 𝑔に遷移するのに必要な
ステップ数は異なるので、最小ステップを学習するような定式化
はどうか
𝑄 𝑠𝑡, 𝑎 𝑡, 𝑠 𝑔, 𝜏 = 𝔼 𝑝 𝑠𝑡+1 𝑠𝑡, 𝑎 𝑡
1 + min
𝑎
𝑄 𝑠𝑡+1, 𝑎, 𝑠 𝑔, 𝜏 − 1
𝑄 𝑠𝑡, 𝑎 𝑡, 𝑠 𝑔, 0 = 𝐷 𝑠𝑡+1, 𝑠 𝑔 or +∞
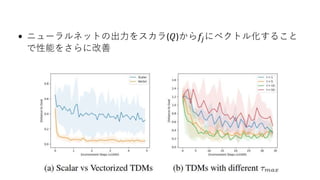
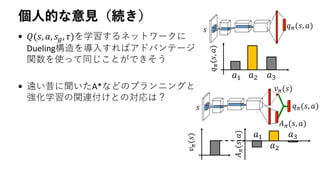
18. 個人的な意見(続き)
• 𝑄(𝑠, 𝑎, 𝑠 𝑔, 𝜏)を学習するネットワークに
Dueling構造を導入すればアドバンテージ
関数を使って同じことができそう
• 遠い昔に聞いたA*などのプランニングと
強化学習の関連付けとの対応は?
𝑠 𝑞 𝜋(𝑠, 𝑎)
𝑎1 𝑎2 𝑎3
𝑞𝜋(𝑠,𝑎)
𝑠 𝑞 𝜋(𝑠, 𝑎)
𝑣 𝜋(𝑠)
𝐴 𝜋(𝑠, 𝑎)
𝑎1
𝑎2
𝑎3
𝐴𝜋(𝑠,𝑎)
𝑣𝜋(𝑠)
19. References
• Andrychowicz, M., …, Abbeel, P., and Zaremba, W. (2017). Hindsight experience replay. NIPS 30.
• O'Doherty, J.P., Cockburn, J., and Pauli, W. M. (2017). Learning, Reward, and Decision Making. Annual
Review of Psychology, 68:73-100.
• Pong*, V., Gu*, S., Dalal, M., and Levine, S. (2018). Temporal Difference Models: Model-Free Deep RL
for Model-Based Control. In Proc. of ICLR 2018.
• Pong, V. TDM: From Model-Free to Model-Based Deep Reinforcement Learning. BAIR Blog.
• 山田照樹. モデル予測制御理論の紹介. SICEセミナー, 2006.
![論文の概要と選択理由
• モデルフリーRLとモデルベースRLの共同
• モデルベースの利点は仮想経験の生成だけでなく
プランニングが利用できる点
• Monte Carlo Tree Searchなどの方法がロボット制御
問題では長期予測の点から役に立たない
• モデル予測制御における制約条件の工夫により解決
[O'Doherty et al., 2017]](https://image.slidesharecdn.com/pong2018a-181112044938/85/NIPS-KANSAI-Reading-Group-7-Temporal-Difference-Models-Model-Free-Deep-RL-for-Model-based-Control-2-320.jpg)
![モデルベース強化学習
• 狭義には状態遷移確率𝑃(𝑠′ ∣ 𝑠, 𝑎)が既知、もしくは推定した
モデルを用いた強化学習アルゴリズム
– 価値反復法や方策反復法、
PILCO [Deisenroth et al., 2014], MCTSなど
環境𝑃 𝑠′ 𝑠, 𝑎
観測𝑜
行動𝑎
報酬𝑟内部状態𝑠
学習率 𝛼
逆温度 𝛽
割引率 𝛾](https://image.slidesharecdn.com/pong2018a-181112044938/85/NIPS-KANSAI-Reading-Group-7-Temporal-Difference-Models-Model-Free-Deep-RL-for-Model-based-Control-3-320.jpg)
![𝑠 𝑔
目標条件付き価値関数 (Goal-conditioned value function)
• 価値関数を目標状態𝑠 𝑔 ∈ 𝒢にも依存するように拡張
マルチタスク強化学習
• 基本的には通常の状態行動価値関数を
と拡張するだけ
• タスクを失敗しても𝑠 𝑔を失敗した軌道の中から選び直すことで
非零の報酬を生成し学習する [Andrychowicz et al., 2017]
𝑄(𝑠, 𝑎, 𝑠 𝑔)
𝑠𝑡
𝑎 𝑡
𝑠𝑡+1
𝑠 𝑔
𝑠 𝑔](https://image.slidesharecdn.com/pong2018a-181112044938/85/NIPS-KANSAI-Reading-Group-7-Temporal-Difference-Models-Model-Free-Deep-RL-for-Model-based-Control-5-320.jpg)
![モデル予測制御 (Model Predictive Control)
• 状態のダイナミクスは既知
• モデルベース強化学習とみなせる
• 目的
制約条件
• 各時間で制約付き最適化問題
を解くので、計算コストは高い
𝑎 𝑡 = argmax
𝑎 𝑡:𝑡+𝑇
𝑖=𝑡
𝑡+𝑇
𝑟𝑐(𝑠𝑖, 𝑎𝑖)
𝑠𝑖+1 = 𝑓 𝑠𝑖, 𝑎𝑖 , ∀𝑖 ∈ 𝑡, … , 𝑡 + 𝑇 − 1
[山田2006]から引用](https://image.slidesharecdn.com/pong2018a-181112044938/85/NIPS-KANSAI-Reading-Group-7-Temporal-Difference-Models-Model-Free-Deep-RL-for-Model-based-Control-6-320.jpg)




![[DL輪読会]逆強化学習とGANs](https://cdn.slidesharecdn.com/ss_thumbnails/irlgans-171128063119-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]Meta-Learning Probabilistic Inference for Prediction](https://cdn.slidesharecdn.com/ss_thumbnails/20181214dl-181218052422-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Learning Latent Dynamics for Planning from Pixels](https://cdn.slidesharecdn.com/ss_thumbnails/taniguchi20181221-190104064850-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Learning to Adapt: Meta-Learning for Model-Based Control](https://cdn.slidesharecdn.com/ss_thumbnails/20180511dl-180511004107-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]Decision Transformer: Reinforcement Learning via Sequence Modeling](https://cdn.slidesharecdn.com/ss_thumbnails/decisiontransformer20210709zhangxin-210709021501-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Deep Learning 第5章 機械学習の基礎](https://cdn.slidesharecdn.com/ss_thumbnails/deeplearning5-180601021956-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]SOLAR: Deep Structured Representations for Model-Based Reinforcement L...](https://cdn.slidesharecdn.com/ss_thumbnails/20190816-190816001737-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Dream to Control: Learning Behaviors by Latent Imagination](https://cdn.slidesharecdn.com/ss_thumbnails/20200313furutav2-200313025657-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会]Learning to Act by Predicting the Future](https://cdn.slidesharecdn.com/ss_thumbnails/20171113dl-171114045641-thumbnail.jpg?width=640&height=640&fit=bounds)





![SSII2021 [TS2] 深層強化学習 〜 強化学習の基礎から応用まで 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts2-01-210607042910-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Dl輪読会]introduction of reinforcement learning](https://cdn.slidesharecdn.com/ss_thumbnails/dlintroductionofreinforcementlearning-161121061444-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]Temporal DifferenceVariationalAuto-Encoder](https://cdn.slidesharecdn.com/ss_thumbnails/20181130new-190205051636-thumbnail.jpg?width=640&height=640&fit=bounds)









